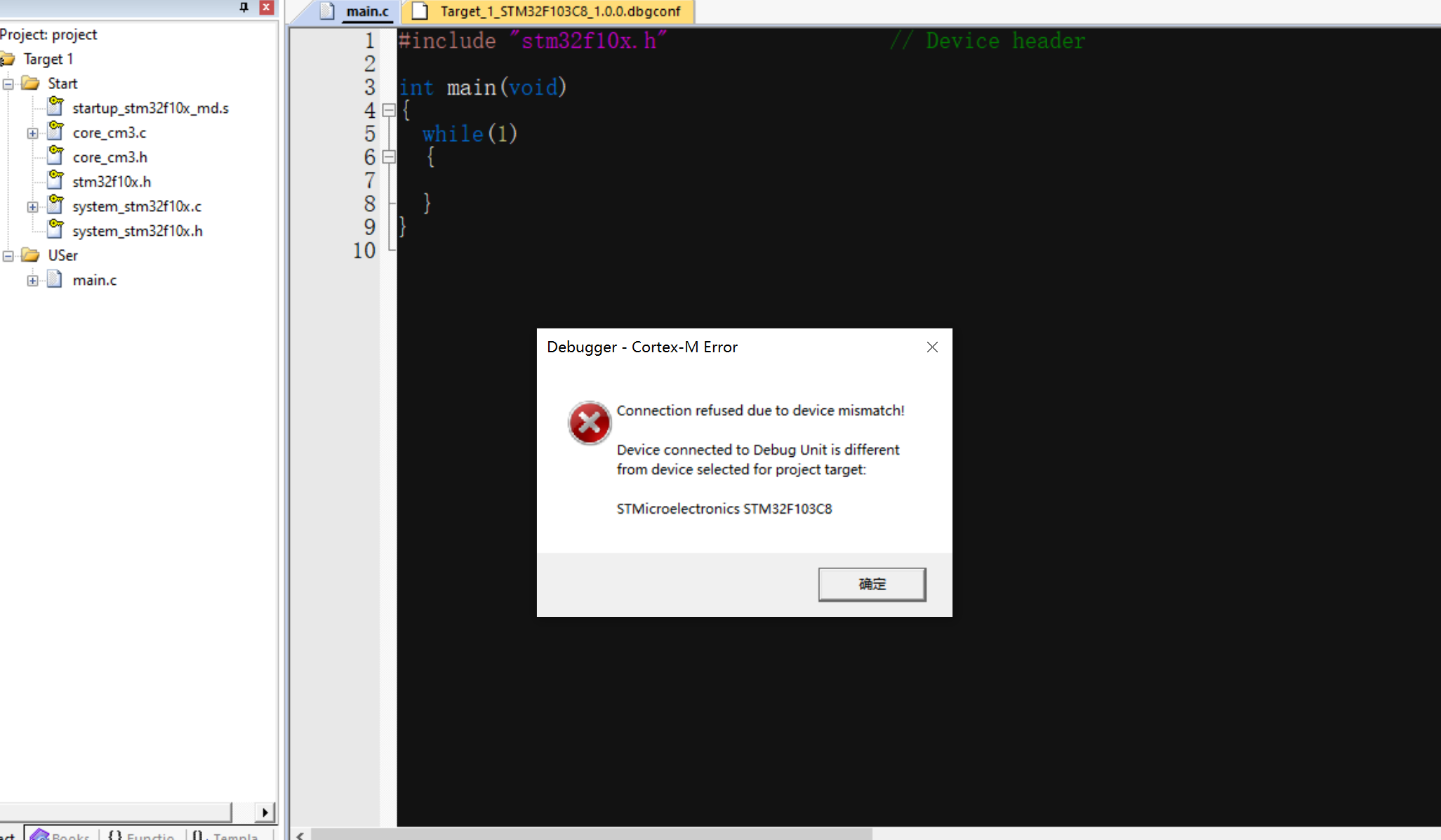
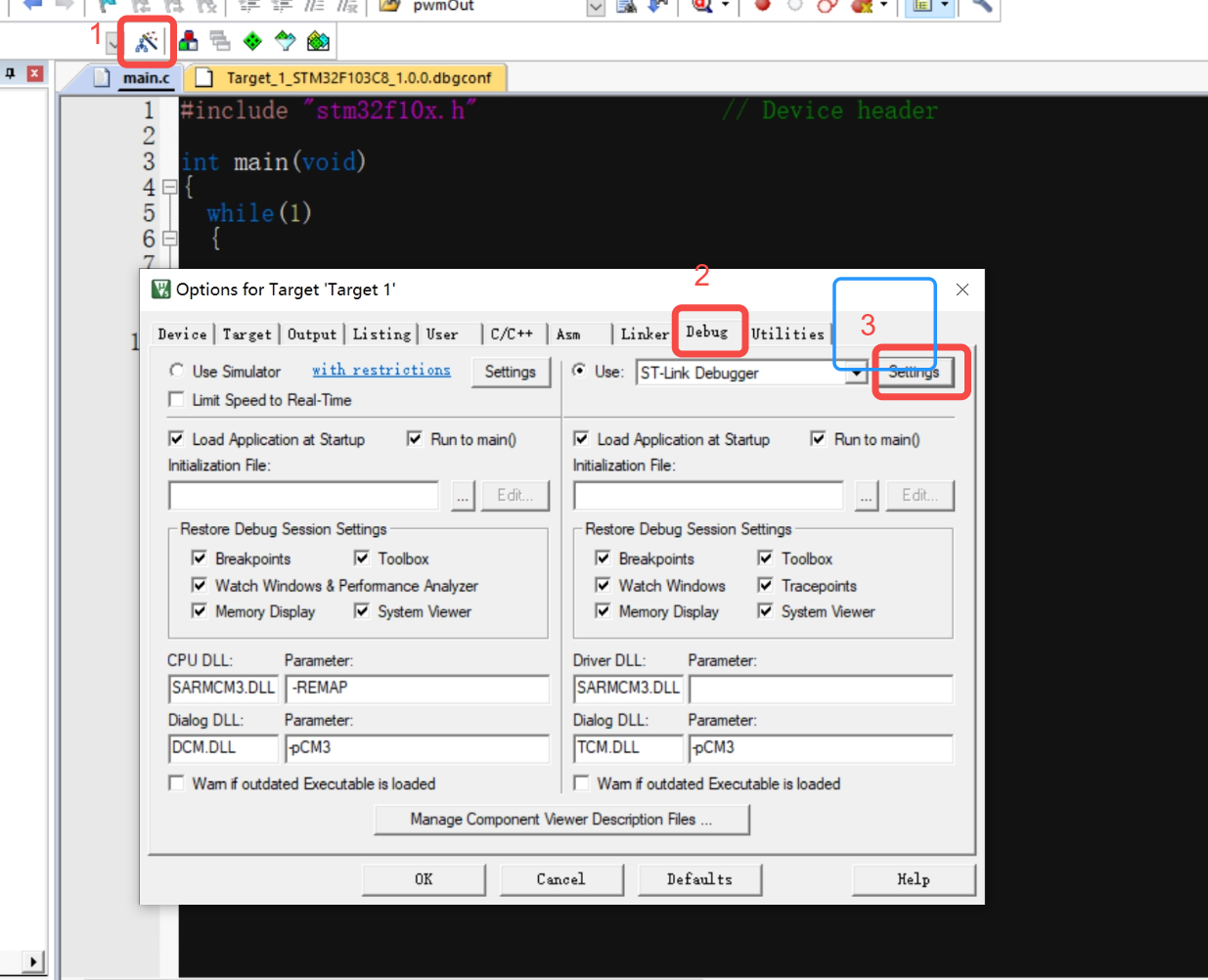
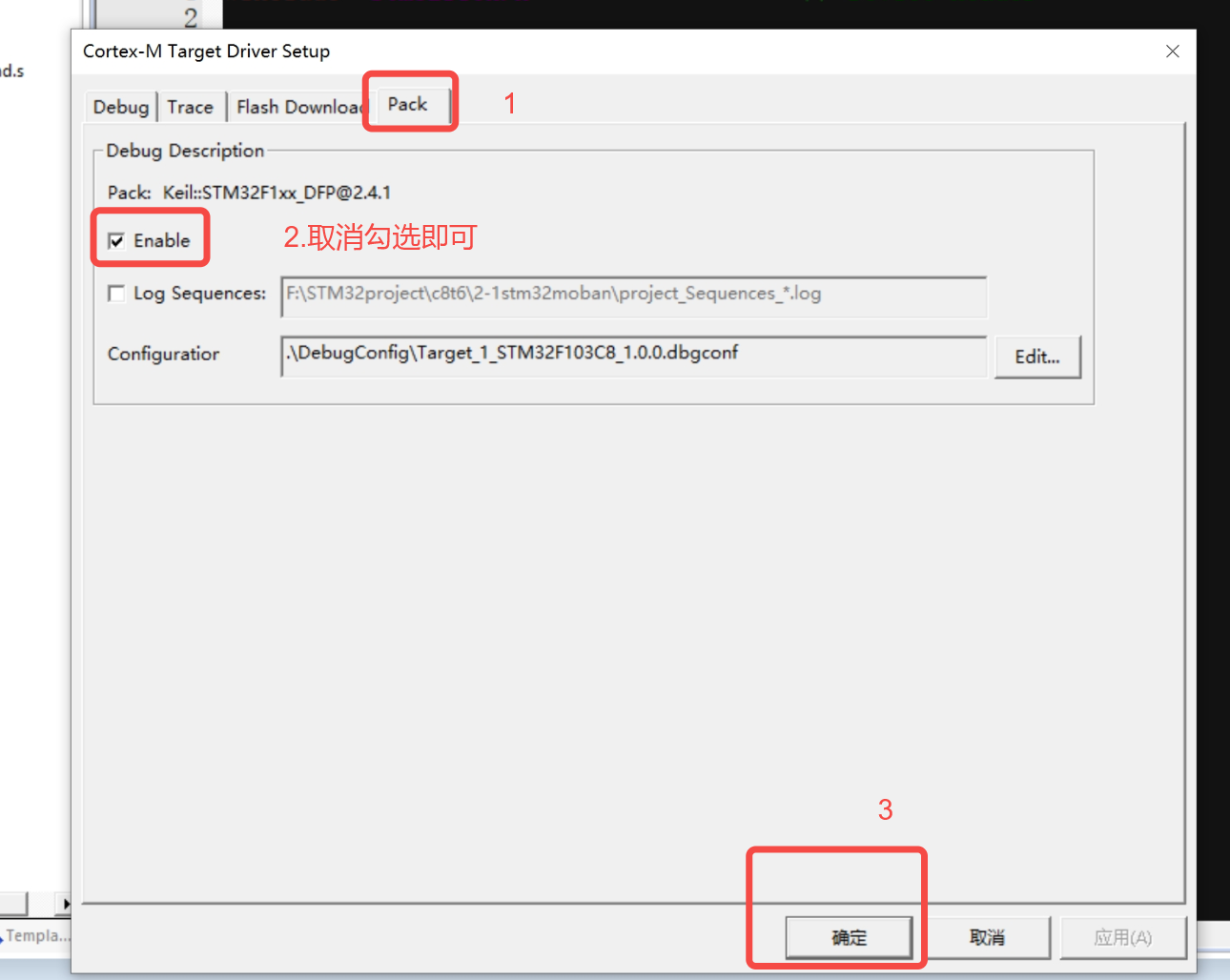
当前位置: 首页 > news >正文 点灯大师(第一步) news 2025/7/1 11:55:52 STLINK报错问题:无法下载,如图 解决方法 查看全文 http://www.xdnf.cn/news/35335.html 相关文章: 【RL系列】ReTool: Reinforcement Learning for Strategic Tool Use in LLMs LeetCode --- 154双周赛 在串口通信中使用共享指针(`std::shared_ptr`) 【HDFS入门】HDFS数据冗余与容错机制解析:如何保障大数据高可靠存储? Ubuntu Linux 中文输入法默认使用英文标点 深入理解FreeRTOS操作系统:计数型信号量的原理与应用 JavaWeb 课堂笔记 —— 13 MySQL 事务 2000-2017年各省城市天然气供气总量数据 Ubuntu 25.04 “Plucky Puffin” 正式发布 多线程和线程同步 非接触式水位传感器详解(STM32) office软件中word里面的编号库和列表库功能 06-libVLC的视频播放器:推流RTMP 第三届世界科学智能大赛新能源赛道:新能源发电功率预测-数据处理心得体会1 Java @Serial 注解深度解析 day46——两数之和-输入有序数组(LeetCode-167) 人工智能在智慧农业中的应用:从田间到餐桌的变革 【Vue】布局解析 Manus技术架构、实现内幕及分布式智能体项目实战 线上高级实训班 洛谷的几道题 某局部三层休闲娱乐中心建筑设计与结构设计 19-算法打卡-哈希表-四数相加II-leetcode(454)-第十九天 @EnableAsync+@Async源码学习笔记之五 第十届团体程序设计天梯赛-上理赛点随笔 学习笔记: Mach-O 文件 Datawhale AI春训营 世界科学智能大赛--合成生物赛道:蛋白质固有无序区域预测 小白经验总结 【信息系统项目管理师】高分论文:论信息系统项目的风险管理(钢铁企业生产计划管理系统) 支持中文对齐的命令行表格打印python库——tableprint cesium中postProcessStages全面解析 13.第二阶段x64游戏实战-分析人物等级和升级经验