城市导航辅助驾驶迅速落地,高精度定位迎来发展契机:首先,以城市 NOA为代表的 L3 级别功能正快速落地,智能驾驶已成各车企竞争的核心领域,搭载城市 NOA 功能的车型数量及渗透率快速提升。伴随电动化和智能化的提升,以及北斗、5G 等技术发展,高精度定位的精度与其在自动驾驶中的安全性作用不断增强,加之政策层面的支持,高精度定位愈发不可或缺。第二,高精度定位在汽车领域的应用场景丰富,其定位精度高达分米乃至毫米充分满足智能驾驶中各项定位精度要求,可在恶劣天气、重复场景、非视距场景和车载传感器不稳定情况下有效实现智能驾驶。第三,广阔的汽车、卫星导航市场为高精度定位的进一步发展奠定了坚实的基础。ADAS 功能逐步进入智能汽车领域成为标配,加之卫星导航产业的日趋成熟,高精度定位商业化应用模式趋于成熟。未来高精度技术在包括基础设施监测在内的公共服务领域、以及人们日常使用的智能穿戴设备等方面大有可为,高精度定位或将进入高速发展阶段。
高精度定位为高阶智驾的刚需,有图/无图模式下皆不可或缺:有图模式依赖高精度定位完善高精地图的道路信息,提高安全冗余。无图模式依赖高精度定位辅助感知算法运算及训练。在“重地图、轻感知”阶段,其结合高精地图发挥作用,充分发挥高精度地图的先导性优势,能够为车辆提供了解当前位置可能的道路特征情况,降低对传感器的性能要求,提高车辆整体的识别精度;在“轻地图、重感知”阶段,车辆主要通过车载传感器,进行大规模真实与仿真道路数据的学习和训练,在不依赖高精度地图的情况下,实现智能驾驶。但车载传感器只能提供相对位置信息,而高精度定位提供绝对位置信息,且能降低对芯片的算力需求,在智驾模型中不可或缺。
格局初现,卫/惯厂商与定位服务商并立:目前国内市场中,主要分为卫/惯终端厂商和定位服务商两大类,国内卫/惯终端企业主要定位于硬件端的生产商,业务依赖于终端导航设备的销售。而定位服务商主要依托较为完备的地基网络增强系统,能够提供通用的卫星定位服务,往往以软件服务商的角色通过年费等订阅制的形式进行收费。但对于智能驾驶,以及智能交通、智慧农业、智慧城市等新的行业需求来看,能够自主设计、融合集成软件、硬件并提供服务的集成厂商重要性日益凸显,各家厂商都在进行产业链整合,往综合性的时空服务商不断迈进。
1 城市导航辅助驾驶逐渐落地,高精度定位快速发展
1.1 城市 NOA 快速落地,高精度定位潜力逐步释放自 2023 年起,以城市 NOA 为代表的 L3 级别功能正快速在市场上落地,华为、小鹏等品牌陆续发布高端智能驾驶车型,蔚来、智己和魏牌也计划在 2024 年将城市NOA拓展至百个以上城市的品牌。智能驾驶已越发成为各车企竞争的核心领域,我们认为 2024 年或成智能驾驶元年。近年来,搭载城市 NOA 功能的车型数量及渗透率显著增长。根据盖世汽车研究院的数据显示,2022 年搭载 NOA 功能的车型为 26 万辆,2023 年达到 95 万辆,2024预计将达到 150 万辆。2022 年搭载城市 NOA 功能的车型为 5.6 万辆,2023 年达到 23.8 万辆,增长率为 323.7%。从 2022 年 Q1 到 2023 年 Q4,搭载城市 NOA 车型数量从 0.4 万辆增长到 8.5 万辆,渗透率从 0.1%增长到 1.4%。
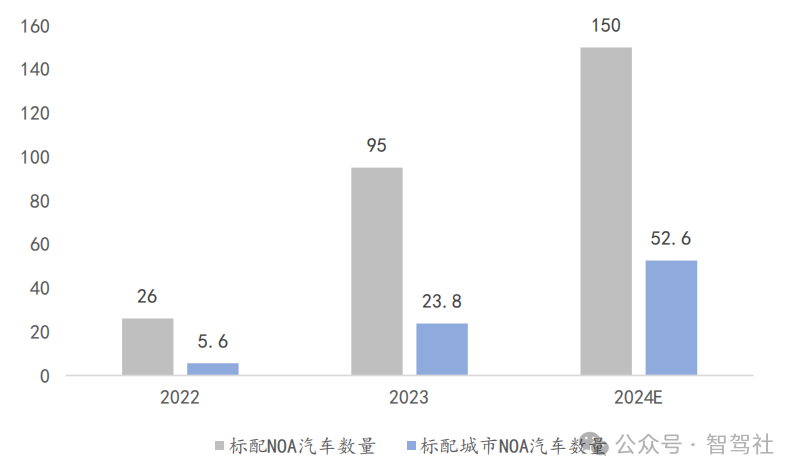
图表1:标配 NOA/城市 NOA 功能汽车数量(万辆)
伴随着自动驾驶从高速 NOA 向城市 NOA 快速推进,对高精度定位的技术要求也在不断提升,依靠单一定位技术伴随着自动驾驶从高速 NOA 向城市 NOA 快速推进,对高精度定位的技术要求也在不断提升,依靠单一定位技术无法满足自动驾驶汽车所需的高精度,技术变革不断涌现: 1)城区道路的复杂性使精度定位要求更高:城市车道多变,交通流复杂,尤其是要在城市十字路口等复杂地段实现城市 NOA,高精度定位精度需达到厘米级;
2)在算法上引入 PPP-RTK:从算法层面统一了 PPP 和 RTK 技术,可实现快速、实时的高精度定位。而且 PPP-RTK 可支持卫星播发和移动通信两种方式,其中卫星播发可以使用低轨卫星;
3)双频 RTK 成为城市 NOA 技术支撑的主流:双频 RTK 经过多年的迭代已在行业内达成共识,且双频 RTK 可以实现更高精度的定位,对城市 NOA 技术的发展十分重要;
4)深耦合算法在城市智驾中更具优势:相较于松耦合和紧耦合技术,深耦合可以有效提升组合导航的精度和可靠性,尤其是在城市高架环岛等恶劣的环境下,可有效缩小定位误差;
5)低轨卫星入局以解决卫星信号被遮蔽问题:在城市场景下,经常出现高楼、高架等信号遮挡场景,使用低轨卫星可以增强信号的覆盖,进一步提升卫星信号的可靠性。

图表2:各大品牌高精度定位技术的车型
技术的发展与政策的支持,高精度定位或将迎来发展新契机。在高精度定位 2.0阶段,即 2023 年高速 NOA 尝试进入城市过程中,伴随电动化和智能化的提升,以及北斗、5G等技术发展,出现的从“重地图、轻感知”到“轻地图、重感知”的技术路线的变化,以解决高精地图进城遭遇的成本和鲜度难题,在这过程中高精度定位的作用发生变化,这也给产业链带来新的变动和机会。同时根据国务院办公厅发布的《关于印发国家卫星导航产业中长期发展规划的通知》,明确提出要进一步提升卫星导航芯片、各类卫星导航系统兼容应用等技术水平,推动核心基础产品升级,促进高性价比的导航、授时、精密测量、测姿定向等通用产品规模化生产。同时,国家发展改革委员会、科学技术部等政府部门也出台了许多相关领域的法律法规政策,推动高精度卫星导航定位产业上下游市场不断扩大和发展。
智能驾驶快速进步的大背景下,对高精度定位的技术要求随之提高。2022-2025年,自动驾驶等级将由L2/L2+逐步向L3/L3+演进,高等级自动驾驶对定位精度的要求更高,定位精度需达厘米级,推动高精度组合定位技术持续发展。
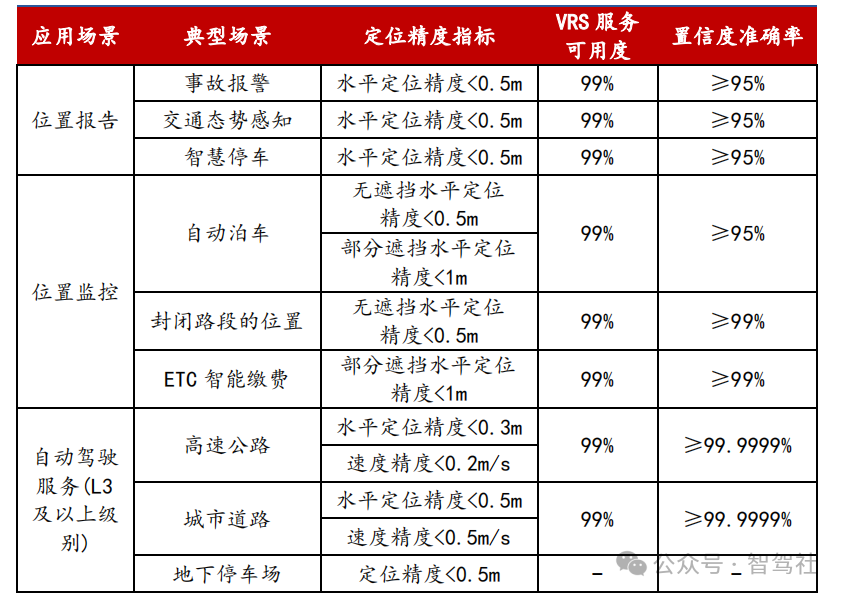
图表3:智能网联汽车高精度定位指标要求
1.2 高精度定位——提供绝对位置信息,潜在的增量组件高精度定位提供更高精度的坐标定位,缩小传统导航定位误差。高精定位一般意义上指的是,通过特定的定位技术获取在全球坐标系下的位置信息(含速度、方向、时间等全局信息),解算出来的位置坐标和真实位置坐标的精度更高。误差范围一般分为厘米级、分米级和亚米级。高精度定位基于实时动态差分技术,提供更高精度的GNSS定位,实现从传统的道路级识别到更精准的车道级识别的提升。普通定位因为有卫星误差、大气误差、设备误差等原因,导致最后定位精度在 10-30 米。而高精度定位通过误差模型计算,使得定位能力提高,定位误差降低,可帮助地图应用识别到行驶中的具体车道,及时准确地进行语音播报。此外,高精度定位相比与摄像头、激光雷达等传感器提供的是绝对位置信息。智能驾驶定位信息有相对与绝对之分,激光雷达和摄像头等传感器是通过对比其他物体,可实现厘米级的相对定位精度,而高精度定位是在现有地球坐标轴上进行绝对定位。高精度定位可以提供全天候的绝对位置信息,解决“我在哪”的问题,同时可以为相对定位传感器形成可靠性补充,为自动驾驶提供高性价比的定位方案。
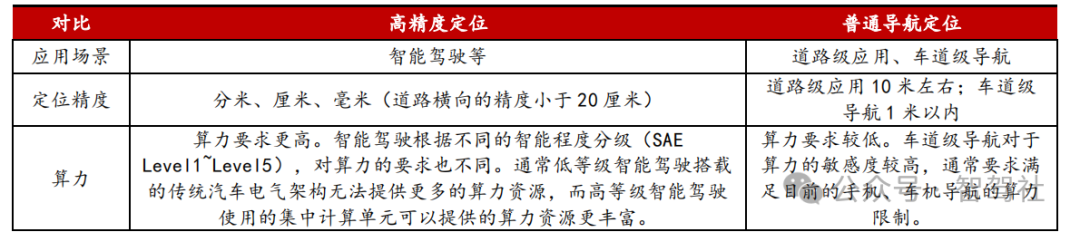
图表4:高精度定位与普通导航定位对比
目前,使用较为广泛的高精定位技术分别是 RTK(实时动态定位:Real-TimeKinematic),即载波相位差分技术,以及 PPP(精密单点定位:Precise PointPositioning):RTK 技术基于两个 GNSS 接收器,其中一个充当基准站,另一个作为流动站。基准站精确定位并连续跟踪卫星信号,同时记录数据,而流动站接收卫星信号以定位自身,并从基准站获取包含校正数据的 RTCM 信息来通过差分运算校正误差。主要特点是在实时中提供毫米级别的定位精度,可以解决卫星、传输轨迹以及接收机本身的误差问题,但覆盖区域小,并且精度随着两者之间的距离增加而降低。PPP 技术则是通过 CPF 解算卫星误差并传输给接收机做校正,允许用户实现毫米级的三维位置精度,而无需依赖差分基站。与差分定位技术不同,PPP 技术不需要在接收器和差分基站之间建立通信链接。用户只需单独的 GNSS 接收器和访问PPP 校正数据的互联网连接,即可进行高精度定位,但需要更长收敛时间的卫星信号观测来实现高精度。PPP-RTK 为二者的结合,主要原理为使用全球基站确定卫星钟差、卫星轨道误差;使用区域基准站对电离层误差、对流层误差等区域性误差进行分析,建立整网的电离层延迟、对流层延迟等误差模型;最终将全球和区域的误差产品发送给移动终端进行定位。
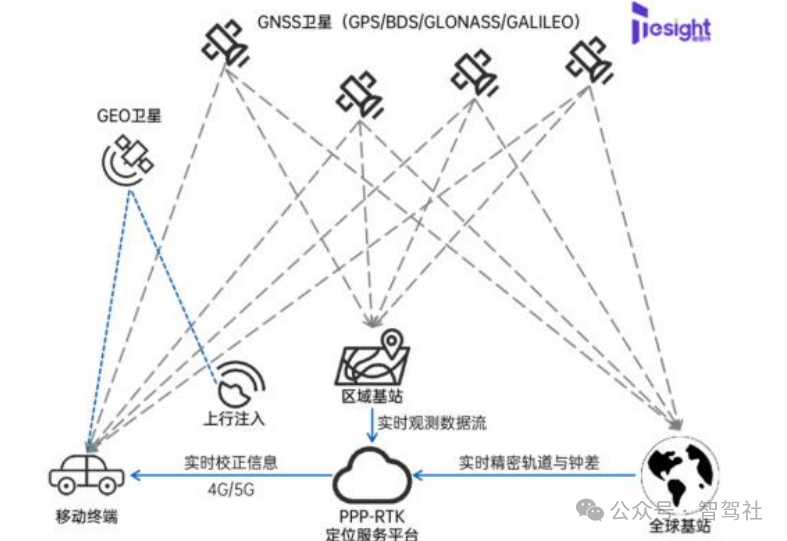
图表5:PPP-RTK 技术示意图
对于车载高精定位技术,卫惯组合(GNSS+IMU)使用最为广泛。高精定位主要有卫星定位、惯性定位、环境感知三种方式,目前卫惯组合导航(GNSS+IMU)是最广泛使用的定位方案,GNSS 模块和 IMU 模块耦合的深度决定了组合导航的性能:其中卫星信号定位主要基于全球卫星导航系统(GNSS),GNSS 定位的基本原理是利用卫星至地面接收站的距离。其优势在于能够为车辆提供绝对位置信息,且定位精度高,缺点在于部分遮挡场景下性能差且输出频率较低。惯性导航(INS)是通过测量加速度来解算运载体位置信息的自主导航定位方法,包括惯性测量单元和计算单元两部分。惯性测量单元 IMU 是融合了陀螺仪、加速度计、磁力计和压力传感器的多轴组合。环境特征匹配定位主要基于相机的平面影像(图片)和激光扫描雷达(LiDAR)的三维影像(点云),通过实时感知测量提取环境特征,并与预先采集制作的基准数据进行匹配,从而获取确定自动驾驶车辆的当前位置。其优点是在没有 GNSS 情況下也可以工作,缺点是需要预先制作地图基准数据,并且根据环境发生的变化需要定期更新地图数据。
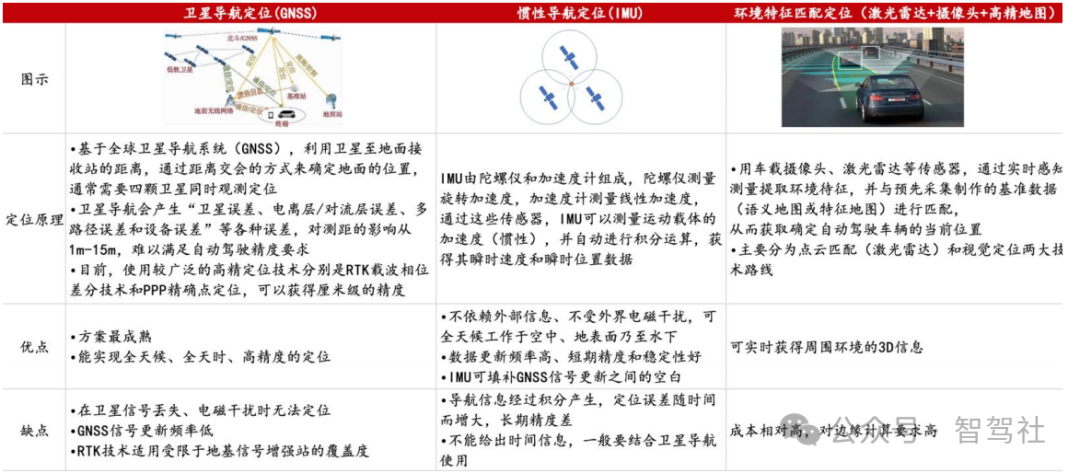
图表6:车载高精定位的技术分类
高精度定位服务在汽车行业的应用前景广阔。首先,高精度定位硬件、软件、位置校正服务是自动驾驶汽车的核心要素。恶劣天气、重复场景、非视距场景和车载传感器不稳定情况下,高精度定位在自动驾驶中起决定性作用。伴随自动驾驶汽车的量产计划在未来几年的实现,高精度定位市场机遇随之浮现。第二,随着ADAS 功能逐步的进入传统汽车,使之成为传统汽车的标配,高精度定位也正助力汽车突破功能边界,为用户带来更智能的行车体验。第三,在 5G 及 C-V2X 迅速发展和快速普及的背景下,基于车联网的应用业务快速扩展,而高精度定位作为车联网整体系统中的关键部分,结合对车辆高精度定位的场景分析和性能需求,应用于终端层、网络层、平台层、应用层。
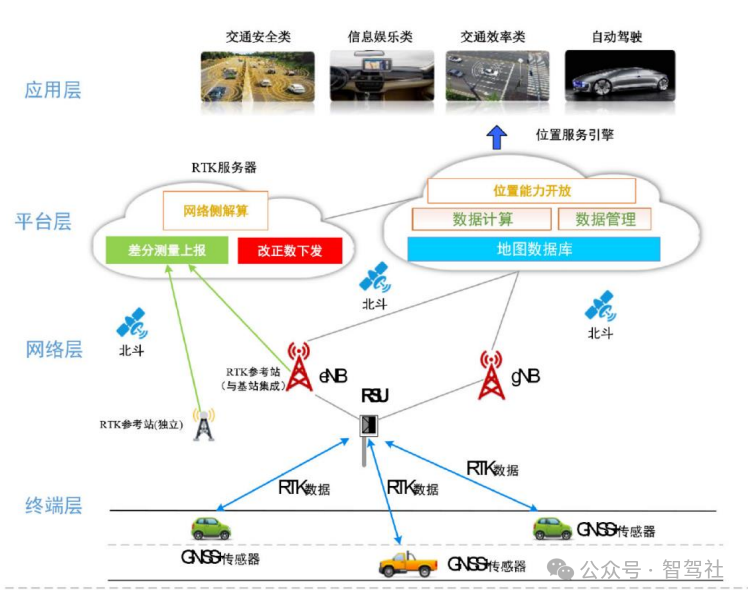
图表7:车辆高精度定位系统网络架构图
车载高精度定位市场进入高速发展,未来市场规模潜力巨大。国内高精度市场产值从 2010 年的 11 亿元增长到 2022 年的 208.7 亿元,受益北斗三号卫星导航系统的开通,国内高精度定位市场的发展进入高速增长期,2020-2022 年高精度市场规模增长率分别达 48.83%、33.25%、37.4%。根据《2022 年中国卫星导航与位置服务产业发展白皮书》披露的我国高精度定位行业市场规模历年增长情况分析,并进一步结合未来我国高精度定位行业发展趋势以及宏观发展环境状况等因素综合分析下,预计 2023-2028 年中国高精度定位行业市场规模有望以 35%的年复合增长率增长,至 2028 年底,中国高精度定位行业市场规模有望达到 1263.4 亿元。
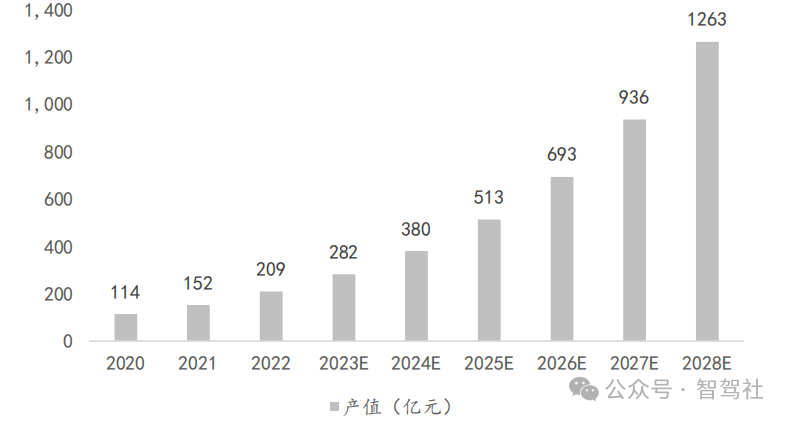
图表8:国内车载高精度市场产值(亿元)
1.3 作为战略新兴产业,时空服务市场广阔高精定位的应用场景广泛:除了车辆导航、自动驾驶为例的智慧出行领域,高精定位还应用于以基础设施监测为例的公共服务领域,以及电网、港口智能监测等产业升级领域,并渗透至大众消费领域,广泛应用于智能手机及智能穿戴。第一,从行业市场看,高精度定位应用于重点运输过程监控、公路基础设施安全监控、港口高精度实时定位调度监控等领域,使综合交通管理效率和运输安全水平有所提升。同时可应用于测绘仪器,在抗击新冠疫情的医疗基建施工以及地质灾害监测预警系统的建设中发挥着重要作用,既保证了精确度,又缩短了勘察测量时间。第二,从大众市场看,高精度技术正全面走向大众应用,包括辅助定位服务、自动驾驶服务以及智能穿戴。目前智能穿戴多以智能手机的辅助设备出现,例如智能手环、智能手表和智能眼镜。5G 等新一代技术将推动国民生活智能化,进而助推高精定位技术应用往生活化场景逐步渗透。第三,从特殊市场看,高精度技术涉及军用、警用、防灾减灾、应急救援、公共安全等领域,同时还在防灾减灾、公安巡逻、监狱指挥管理、疫情防控等细分市场得到相应的应用部署。近年来,我国多地都针对地质灾害多发区域,均部署了基于北斗系统的高精度地质灾害监测预警系统。因此,在当前全球经济迈向高质量发展的新背景下,公共基础设施的运行、行业的解决方案或是大众生活出行领域的数智化,都离不开以数据决策为基础。而高精定位作为精准位置数据获取的基础技术,将延伸更多元化的符合市场发展的数据技术产品和服务,市场需求将持续提升。

图表9:高精定位的应用场景
国内的高精定位及延申的卫星导航领域,市场前景广阔。中国汽车工业协会发布的数据显示,2023 年,我国汽车产销分别完成 3016.1 万辆和 3009.4 万辆,同比分别增长 11.6%和 12%。同时,我国卫星导航与位置服务产业结构趋于成熟,疫情封闭使无人系统、医疗健康、防疫消杀、远程监控、线上服务等下游运营服务环节的应用场景非常活跃,市场规模快速扩大。根据中商情报网显示,2022 年我国卫星导航与位置服务产业总体产值已达到 5007 亿元,同比增长 6.76%。2024 年有望继续较快增长,预计整体产值可达 6355 亿元。我们认为汽车产量的快速增长,与卫星导航与位置服务产业链的日趋完善,有望带动中国·高精定位及更大领域的卫星导航市场快速发展。
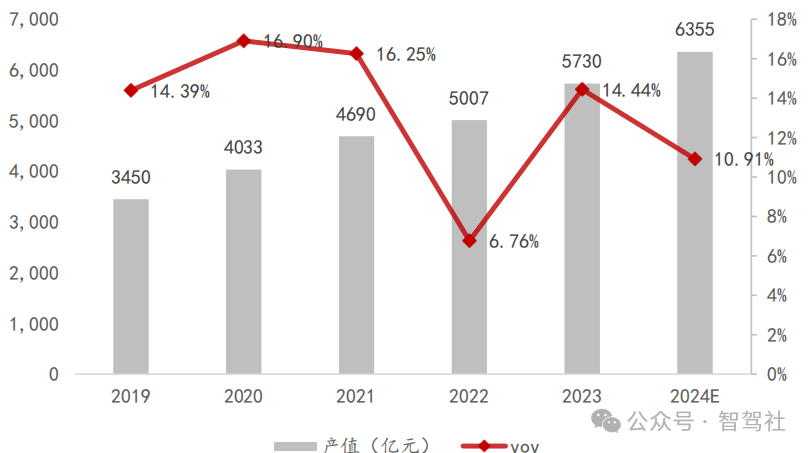
图表10:国内卫星导航与位置服务产业总体产值(亿元,%)
全球范围内,高精度定位所属的卫星导航产业发展迅速。目前,全球卫星导航系统的应用领域在不断扩大,快速发展的物联网将带动更多新产品和新应用的出现,驱动全球卫星导航产业规模持续扩大,预计导航芯片、导航地图、定位导航、位置服务等多方面的需求将继续维持较快增长。根据欧洲全球导航卫星系统局的数据显示,自 2019 年起,GNSS 作为少数逆势上涨的产业之一,未来十年预计将保持稳定增长。从终端数量看,预计 2029 年亚太地区 GNSS 终端数量将达 64 亿台,约占全球终端数量的 67.4%,全球 GNSS 市场将以亚太地区为核心。
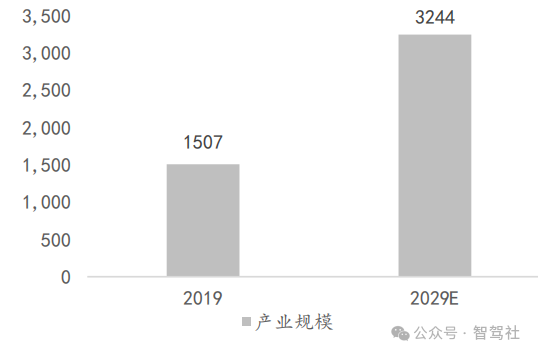
图表11:全球卫星产业规模(亿欧元)
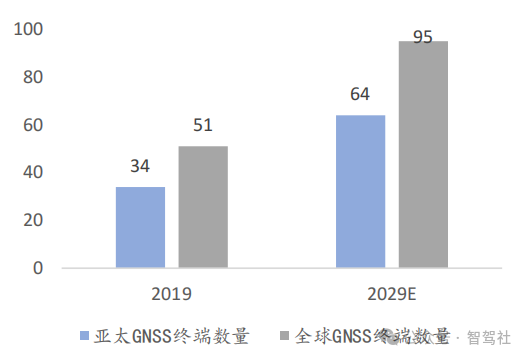
图表12:全球及亚太地区 GNSS 终端数量(亿台)
2 有图/无图路线之争,不可或缺的高精度定位整体技术路径上,高精度定位为高阶智驾的刚需:在“重地图、轻感知”阶段,其结合高精地图发挥作用;在“轻地图、重感知”阶段,其匹配使用 ADAS 地图、提升 BEV 算法效果,从而具备车端 SLAM 建图能力、感知样本真值标注能力,并为智能驾驶各个运动场景提供底层数据支撑。
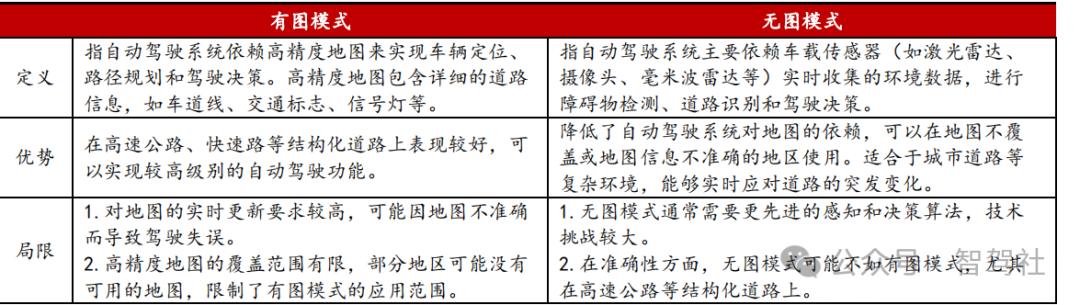
图表13:有图模式与无图模式对比
2.1 有图模式:“定位+地图”构成车载导航全景图提供准确安全可靠的高精度定位信息,是智能网联汽车安全行驶的重要前提。精准的车辆定位信息能够帮助车辆更好的使用高精度地图,并为决策规划、运动控制模块提供有效的参数信息。高精度定位模块是智能网联汽车的核心模块,也是车辆自主导航、自动驾驶的重要支撑。其中,对于自动驾驶车辆,尤其是 L3 及以上级别的自动驾驶车辆,对高精度定位的需求是刚性的,不可或缺的。高精度地图将大量的行车辅助信息存储为结构化数据,并通过云端实时更新高精度动态地图数据。高精地图可提供两类信息,第一类是道路数据,比如车道线的位置、类型、宽度、坡度和曲率等车道信息。第二类是车道周边的固定对象信息,比如交通标志、交通信号灯等信息、车道限高、下水道口、障碍物及其他道路细节,还包括高架物体、防护栏、道路边缘类型、路边地标等基础设施信息。并且这些信息都有地理编码,导航系统可以准确定位地形、物体、路面的几何结构、道路标示线的位置等,从而引导车辆行驶。