附加动量的 BP 网络学习改进算法详解
一、引言
BP(Back Propagation)神经网络是一种经典的神经网络模型,广泛应用于模式识别、函数逼近、数据分类等众多领域。然而,传统的 BP 算法存在一些局限性,如收敛速度慢、容易陷入局部极小值等问题。为了克服这些问题,研究者们提出了各种改进算法,其中附加动量的 BP 网络学习算法是一种有效的改进方法。本文将详细阐述附加动量的 BP 网络学习改进算法的原理、实现步骤以及通过代码示例展示其具体实现过程。
二、传统 BP 网络学习算法回顾
(一)网络结构与前向传播
BP 神经网络一般包括输入层、一个或多个隐藏层和输出层。设输入层有 n n n 个神经元,输入向量为 x = ( x 1 , x 2 , ⋯ , x n ) \mathbf{x}=(x_1,x_2,\cdots,x_n) x=(x1,x2,⋯,xn);隐藏层有 h h h 个神经元,输出向量为 h = ( h 1 , h 2 , ⋯ , h h ) \mathbf{h}=(h_1,h_2,\cdots,h_h) h=(h1,h2,⋯,hh);输出层有 m m m 个神经元,输出向量为 y = ( y 1 , y 2 , ⋯ , y m ) \mathbf{y}=(y_1,y_2,\cdots,y_m) y=(y1,y2,⋯,ym)。
在前向传播过程中,对于输入层到隐藏层,隐藏层神经元的输入为:
n e t j = ∑ i = 1 n w i j x i + b j net_{j}=\sum_{i = 1}^{n}w_{ij}x_{i}+b_{j} netj=∑i=1nwijxi+bj
其中, w i j w_{ij} wij 是输入层神经元 i i i 到隐藏层神经元 j j j 的连接权重, b j b_{j} bj 是隐藏层神经元 j j j 的偏置。隐藏层神经元的输出通常经过激活函数 f ( ⋅ ) f(\cdot) f(⋅) 处理,如常用的 Sigmoid 函数 f ( x ) = 1 1 + e − x f(x)=\frac{1}{1 + e^{-x}} f(x)=1+e−x1,则 h j = f ( n e t j ) h_{j}=f(net_{j}) hj=f(netj)。
类似地,对于隐藏层到输出层,输出层神经元的输入为:
n e t k = ∑ j = 1 h w j k h j + b k net_{k}=\sum_{j = 1}^{h}w_{jk}h_{j}+b_{k} netk=∑j=1hwjkhj+bk
输出层神经元的输出为 y k = f ( n e t k ) y_{k}=f(net_{k}) yk=f(netk)。
(二)误差计算与反向传播
误差计算一般采用均方误差(MSE)准则。对于训练样本集 { ( x ( p ) , t ( p ) ) } p = 1 P \{(\mathbf{x}^{(p)},\mathbf{t}^{(p)})\}_{p = 1}^{P} {(x(p),t(p))}p=1P,其中 x ( p ) \mathbf{x}^{(p)} x(p) 是第 p p p 个输入样本, t ( p ) \mathbf{t}^{(p)} t(p) 是对应的目标输出,均方误差为:
E = 1 2 P ∑ p = 1 P ∑ k = 1 m ( y k ( p ) − t k ( p ) ) 2 E=\frac{1}{2P}\sum_{p = 1}^{P}\sum_{k = 1}^{m}(y_{k}^{(p)}-t_{k}^{(p)})^{2} E=2P1∑p=1P∑k=1m(yk(p)−tk(p))2
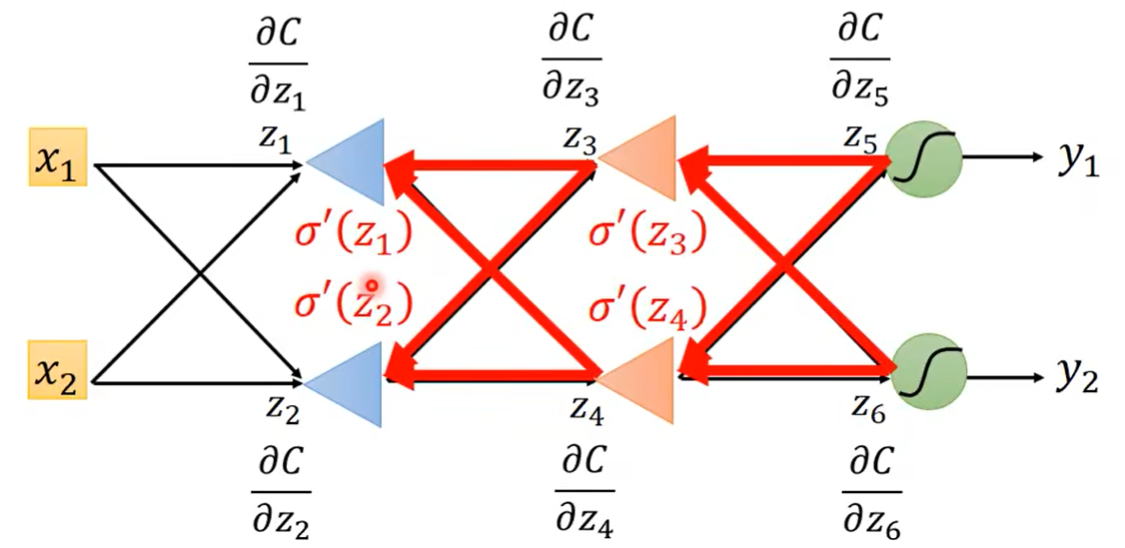
在反向传播过程中,根据误差函数对权重的梯度来更新权重。以输出层到隐藏层的权重更新为例,根据链式法则,权重 w j k w_{jk} wjk 的更新公式为:
Δ w j k = − η ∂ E ∂ w j k \Delta w_{jk}=-\eta\frac{\partial E}{\partial w_{jk}} Δwjk=−η∂wjk∂E
其中, η \eta η 是学习率。对于隐藏层到输入层的权重更新也有类似的公式。具体计算过程中,需要先计算误差对各层输出的偏导数,再通过链式法则逐步计算出对权重的偏导数。
三、传统 BP 算法的问题分析
(一)收敛速度问题
传统 BP 算法在训练过程中,尤其是在处理复杂的非线性问题时,收敛速度往往较慢。这是因为每次权重更新仅基于当前样本的梯度信息,而没有充分利用之前训练过程中的信息。在误差曲面较为平坦的区域,梯度值较小,导致权重更新缓慢,从而延长了训练时间。
(二)局部极小值问题
BP 算法基于梯度下降法,容易陷入局部极小值。在误差曲面中,局部极小值点周围的梯度为零或接近零,使得算法无法继续朝着全局最小值的方向更新权重,导致训练得到的网络性能不佳。
四、附加动量的 BP 网络学习改进算法原理
(一)动量项的引入
附加动量的 BP 算法在传统 BP 算法的基础上,在权重更新公式中添加了动量项。动量项的基本思想是将上一次权重更新的方向和大小考虑进来,使得本次权重更新不仅依赖于当前的梯度信息,还受到之前权重更新趋势的影响。
设当前时刻 t t t,对于权重 w w w,其更新公式变为:
Δ w ( t ) = η ∂ E ∂ w + α Δ w ( t − 1 ) \Delta w(t)=\eta\frac{\partial E}{\partial w}+ \alpha\Delta w(t - 1) Δw(t)=η∂w∂E+αΔw(t−1)
其中, η \eta η 是学习率, α \alpha α 是动量系数(通常取值在 0 和 1 之间), Δ w ( t − 1 ) \Delta w(t - 1) Δw(t−1) 是上一次权重 w w w 的更新量。
(二)动量项的作用机制
- 加速收敛
在误差曲面较为平坦的区域,梯度值较小,但由于动量项的存在,它可以继承之前的更新趋势,使得权重更新不会停滞,从而加快了收敛速度。例如,当连续几个训练步骤中梯度方向基本一致时,动量项会累积这种趋势,使权重更新朝着这个方向加速进行。 - 跳出局部极小值
当算法陷入局部极小值附近时,当前的梯度信息可能会使权重更新停止。而动量项可以使权重更新具有一定的惯性,有可能跳过局部极小值区域,继续向全局最小值方向搜索。因为动量项可以使权重更新方向不完全依赖于当前局部的梯度信息,而是综合了之前的更新历史。
五、附加动量的 BP 网络学习改进算法实现步骤
(一)初始化
- 权重和偏置初始化
随机初始化网络的连接权重 w i j w_{ij} wij 和 w j k w_{jk} wjk 以及偏置 b j b_{j} bj 和 b k b_{k} bk。通常权重可以在一个较小的范围内随机取值,如 [ − 0.5 , 0.5 ] [-0.5,0.5] [−0.5,0.5]。 - 动量项初始化
对于每个权重和偏置,初始化其动量项为零。例如,对于权重 w i j w_{ij} wij,其动量项 Δ w i j ( 0 ) = 0 \Delta w_{ij}(0)=0 Δwij(0)=0。
(二)训练过程
- 前向传播
对于每个训练样本,按照传统 BP 算法的前向传播方式计算网络的输出,即依次计算输入层到隐藏层、隐藏层到输出层的神经元输出。 - 误差计算与反向传播
计算当前样本的误差,并根据误差进行反向传播计算梯度。对于输出层到隐藏层和隐藏层到输入层的权重,分别计算其梯度。 - 权重更新
根据附加动量的权重更新公式更新权重。以权重 w j k w_{jk} wjk 为例,计算当前梯度 ∂ E ∂ w j k \frac{\partial E}{\partial w_{jk}} ∂wjk∂E,然后更新权重:
Δ w j k ( t ) = η ∂ E ∂ w j k + α Δ w j k ( t − 1 ) \Delta w_{jk}(t)=\eta\frac{\partial E}{\partial w_{jk}}+ \alpha\Delta w_{jk}(t - 1) Δwjk(t)=η∂wjk∂E+αΔwjk(t−1)
w j k ( t ) = w j k ( t − 1 ) − Δ w j k ( t ) w_{jk}(t)=w_{jk}(t - 1)-\Delta w_{jk}(t) wjk(t)=wjk(t−1)−Δwjk(t)
对于偏置的更新也有类似的步骤。
- 重复训练
对所有训练样本重复上述步骤,完成一次训练迭代(epoch)。多次重复训练迭代,直到满足训练停止条件,如达到预定的训练次数、误差小于某个阈值等。
六、代码示例
以下是使用 Python 实现附加动量的 BP 网络学习改进算法的代码示例:
import numpy as np# Sigmoid 激活函数
def sigmoid(x):return 1 / (1 + np.exp(-x))# Sigmoid 函数的导数
def sigmoid_derivative(x):return x * (1 - x)class NeuralNetwork:def __init__(self, input_size, hidden_size, output_size):self.input_size = input_sizeself.hidden_size = hidden_sizeself.output_size = output_size# 随机初始化权重self.W1 = np.random.rand(self.input_size, self.hidden_size)self.b1 = np.zeros((1, self.hidden_size))self.W2 = np.random.rand(self.hidden_size, self.output_size)self.b2 = np.zeros((1, self.output_size))# 初始化动量项self.delta_W1 = np.zeros_like(self.W1)self.delta_b1 = np.zeros_like(self.b1)self.delta_W2 = np.zeros_like(self.W2)self.delta_b2 = np.zeros_like(self.b2)self.momentum = 0.9 # 动量系数self.learning_rate = 0.1 # 学习率def forward_propagation(self, X):self.z1 = np.dot(X, self.W1) + self.b1self.a1 = sigmoid(self.z1)self.z2 = np.dot(self.a1, self.W2) + self.b2self.a2 = sigmoid(self.z2)return self.a2def back_propagation(self, X, y):m = X.shape[0]dZ2 = self.a2 - ydW2 = np.dot(self.a1.T, dZ2) / mdb2 = np.sum(dZ2, axis=0, keepdims=True) / mdZ1 = np.dot(dZ2, self.W2.T) * sigmoid_derivative(self.a1)dW1 = np.dot(X.T, dZ1) / mdb1 = np.sum(dZ1, axis=0, keepdims=True) / mreturn dW1, db1, dW2, db2def update_weights(self, dW1, db1, dW2, db2):# 更新隐藏层到输出层的权重和偏置self.delta_W2 = self.learning_rate * dW2 + self.momentum * self.delta_W2self.W2 -= self.delta_W2self.delta_b2 = self.learning_rate * db2 + self.momentum * self.delta_b2self.b2 -= self.delta_b2# 更新输入层到隐藏层的权重和偏置self.delta_W1 = self.learning_rate * dW1 + self.momentum * self.delta_W1self.W1 -= self.delta_W1self.delta_b1 = self.learning_rate * db1 + self.momentum * self.delta_b1self.b1 -= self.delta_b1def train(self, X, y, epochs):for epoch in range(epochs):output = self.forward_propagation(X)dW1, db1, dW2, db2 = self.back_propagation(X, y)self.update_weights(dW1, db1, dW2, db2)if epoch % 100 == 0:error = np.mean((output - y) ** 2)print(f'Epoch {epoch}: Error = {error}')
你可以使用以下方式测试这个神经网络:
# 示例用法
X = np.array([[0, 0], [0, 1], [1, 0], [1, 1]])
y = np.array([[0], [1], [1], [0]])
neural_network = NeuralNetwork(2, 3, 1)
neural_network.train(X, y, 1000)
七、总结
附加动量的 BP 网络学习改进算法通过引入动量项有效地解决了传统 BP 算法收敛速度慢和容易陷入局部极小值的问题。通过在权重更新公式中考虑上一次权重更新的信息,使得算法在训练过程中更加稳定和高效。代码示例展示了该算法在 Python 中的实现过程,通过实际运行可以观察到其在训练神经网络时的性能提升。在实际应用中,需要根据具体的问题和数据集合理选择学习率和动量系数等参数,以进一步优化算法的性能。这种改进算法在众多需要使用 BP 神经网络的领域中具有重要的应用价值,能够提高模型训练的质量和效率。




![241118学习日志——[CSDIY] [InternStudio] 大模型训练营 [07]](https://i-blog.csdnimg.cn/direct/abcdaeed622a404a91a48d1d8190c85d.jpeg)