100种算法【Python版】第60篇——滤波算法之粒子滤波
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.xdnf.cn/news/8738.html
如若内容造成侵权/违法违规/事实不符,请联系一条长河网进行投诉反馈,一经查实,立即删除!相关文章

【C/C++】字符/字符串函数(0)(补充)——由ctype.h提供
零.导言 除了字符分类函数,字符转换函数也是一类字符/字符串函数。 C语言提供了两种字符转换函数,分别是 toupper , tolower。 一.什么是字符转换函数? 顾名思义,即转换字符的函数,如大写字母转小写字母&am…

华为eNSP实验:QINQ技术
QinQ技术是一种扩展VLAN空间的技术,通过在802.1Q标签报文的基础上再增加一层802.1Q的Tag来达到扩展VLAN空间的功能。
QinQ技术允许私网VLAN透传公网,使得在骨干网中传递的报文有两层802.1Q Tag(一层公网Tag,一层私网Tagÿ…

YOLOv5之Common.py
文章目录 1.学习目的2.网络模型3.common.py分析 1.学习目的
YOLOv5中最关键一个模型类
2.网络模型 3.common.py分析
# Ultralytics YOLOv5 🚀, AGPL-3.0 license…
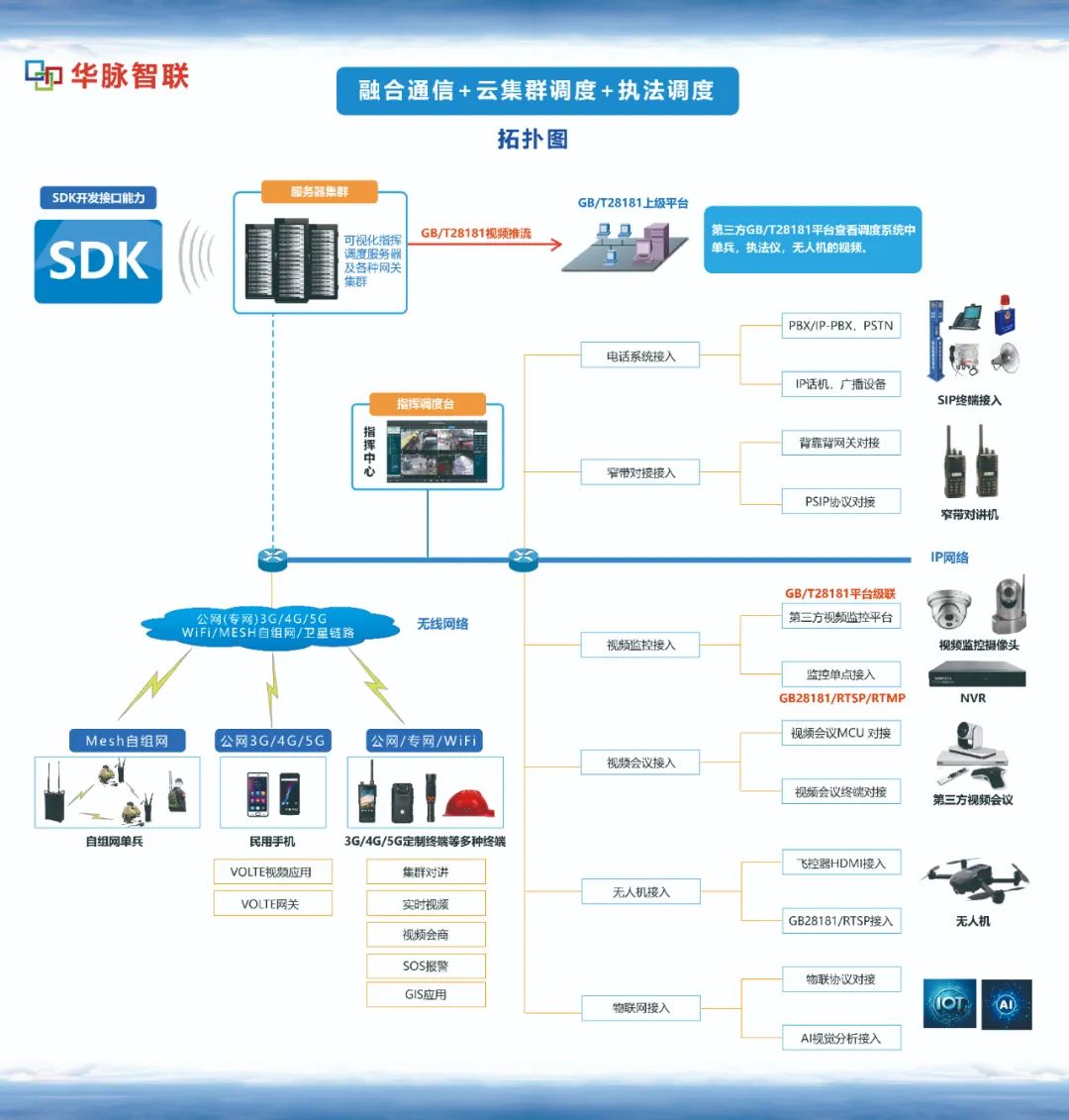
5G时代,国产化融合通信行业的新机遇
在5G时代,国产化融合通信行业正在经历重要的转型与崛起,国产化融合通信行业正肩负着重要的社会责任,成为了推动我们社会发展的重要力量。5G技术的高速发展以及大规模的商业应用,使国产化融合通信行业迎来了前所未有的发展机遇。 5…

Spring WebFlux 核心原理(2-2)
1、Project Reactor 核心
1.1、新建项目 新建maven项目,将Project Reactor作为依赖项添加到应用程序中:
<?xml version"1.0" encoding"UTF-8"?>
<project xmlns"http://maven.apache.org/POM/4.0.0" xmlns:x…

sublime Text的提取查找结果功能
notePad中是 sublime Text是快捷键 ctrlshiftF 点击find就行了,会新建一个文件里面是提取的内容 勾选展示上下文的情况

基于Jeecgboot3.6.3vue3的flowable流程online表单的审批使用介绍
更多技术支持与服务请加入我的知识星球或加我微信,名称:亿事达nbcio技术交流社区https://t.zsxq.com/iPi8F
今天介绍一下基于jeecgboot3.6.3的flowable流程使用online表单进行审批的情况
1、首先建立一个online应用类型的流程,如下: 2、进行…

flink 内存配置(二):设置TaskManager内存
flink 内存配置(一):设置Flink进程内存
flink 内存配置(二):设置TaskManager内存
flink 内存配置(三):设置JobManager内存
flink 内存配置(四)…

基于SpringBoot沉浸式戏曲文化体验系统【附源码】
基于SpringBoot沉浸式戏曲文化体验系统
效果如下:
系统主页面 系统登陆页面 用户管理页面 戏曲剧目管理页面 戏曲倾听页面 活动信息管理页面 个人中心页面 研究背景
随着互联网技术的飞速发展,传统文化传播方式正面临着前所未有的变革。戏曲作为我国传…

P3-1.【结构化程序设计】第一节——知识要点:算法、顺序结构程序设计、if语句的语法结构及各种用法
讲解视频: P3-1.【结构化程序设计】第一节——知识要点:算法、顺序结构程序设计、if语句的语法结构及各种用法 知识要点:算法、顺序结构程序设计、if语句的语法结构及各种用法
一、算法、顺序结构程序设计任务分析
知识要点:算法…
RAG三件套运行的新选择 - GPUStack
GPUStack 是一个开源的大模型即服务平台,可以高效整合并利用 Nvidia、Apple Metal、华为昇腾和摩尔线程等各种异构的 GPU/NPU 资源,提供本地私有部署大模型解决方案。
GPUStack 可以支持 RAG 系统中所需要的三种关键模型:Chat 对话模型&…

SSM物联网养殖管理系统-计算机毕业设计源码03998
目录 1 绪论 1.1 研究背景和意义 1.2国内外研究现状 1.3论文结构与章节安排 2 系统分析 2.1 可行性分析 2.1.1 技术可行性分析 2.1.2经济可行性分析 2.1.3操作可行性分析 2.2 系统功能分析 2.2.1 功能性分析 2.2.2 非功能性分析 2.3 系统用例分析 2.4 系统流程分析…

使用Python进行健康监测和分析的案例研究
健康监测和分析是指系统地使用健康数据来跟踪和评估个人或人群在一段时间内的健康状况。它包含一系列活动,从实时生理数据收集(如心率,血压和体温)到分析更复杂的健康记录(包括患者病史,生活方式选择和遗传…

RHCE 第四次作业
一.搭建dns服务器能够对自定义的正向或者反向域完成数据解析查询。
1.配置环境 [rootlocalhost ~]# yum install bind [rootlocalhost ~]#systemctl stop firewalld [rootlocalhost ~]#setenforce 0 2.配置DNS主服务器 [rootlocalhost ~]# vim /etc/named.conf options { …


PyQt5实战——翻译的实现,成功爬取微软翻译(可长期使用)经验总结(九)
个人博客:苏三有春的博客 系类往期文章: PyQt5实战——多脚本集合包,前言与环境配置(一) PyQt5实战——多脚本集合包,UI以及工程布局(二) PyQt5实战——多脚本集合包,程序…
![[含文档+PPT+源码等]精品基于Nodejs实现的物流管理系统的设计与实现](https://img-blog.csdnimg.cn/img_convert/6ce4ae5fc4086b147a6c43c0b41a752b.png)
[含文档+PPT+源码等]精品基于Nodejs实现的物流管理系统的设计与实现
基于Node.js实现的物流管理系统的设计与实现背景,主要源于物流行业的快速发展以及信息技术在物流管理中的广泛应用。以下是对该背景的具体阐述:
一、物流行业的快速发展
随着全球经济一体化的加速和电子商务的蓬勃发展,物流行业作为连接生产…

JavaWeb开发9
ResponseBody 类型:方法注解、类注解 位置:Controller方法上/类上 作用:将方法返回值直接响应,如果返回值类型是实体对象/集合,将会转换为JSON格式响应 说明:RestControllerControllerResponseBody;
统…

直播美颜SDK开发指南:实时美颜技术的架构与优化策略
时下,为了满足市场需求,许多企业开始开发自己的美颜SDK,通过集成到直播或视频应用中,实现实时美颜效果。接下来,笔者将从美颜SDK的架构设计和优化策略出发,深入探讨如何打造一个智能化的视频美颜平台。
一…

Leecode热题100-104.二叉树中的最大路径和
二叉树中的 路径 被定义为一条节点序列,序列中每对相邻节点之间都存在一条边。同一个节点在一条路径序列中 至多出现一次 。该路径 至少包含一个 节点,且不一定经过根节点。
路径和 是路径中各节点值的总和。
给你一个二叉树的根节点 root ,…
最新文章
- Rust闭包(能够捕获周围作用域变量的匿名函数,广泛应用于迭代、过滤和映射)闭包变量三种捕获方式:通过引用(不可变引用)、通过可变引用和通过值(取得所有权)
- 移植 AWTK 到 纯血鸿蒙 (HarmonyOS NEXT) 系统 (9) - 编译现有的AWTK应用程序
- 手机屏幕上进行OCR识别方案
- STM32CubeMX配置-PWM输出
- 10DSP学习-利用syscfg配置ADC,并使用EPWM触发转换
- java导出word文件(手绘)
- 一文了解什么是医学科技查新
- 【梯度下降法优化】随机梯度下降、牛顿法、动量法、Nesterov、AdaGrad、RMSprop、Adam
- 五个高质量伤感视频素材资源站,帮你快速找到完美创作素材
- go语言中的通道(channel)详解
- 天正建筑T20V8
- JavaScript 实现文本转语音功能