论文导读 - 基于边缘计算、集成学习与传感器集群的便携式电子鼻系统
基于边缘计算、集成学习与传感器集群的便携式电子鼻系统
原论文地址:https://www.sciencedirect.com/science/article/abs/pii/S0925400522015684
引用此论文(GB/T 7714-2015):
- WANG T, WU Y, ZHANG Y, et al. Portable electronic nose system with elastic architecture and fault tolerance based on edge computing, ensemble learning, and sensor swarm[J]. Sensors and Actuators B: Chemical, 2023, 375: 132925. DOI:10.1016/j.snb.2022.132925.
论文作者学术主页:https://www.researchgate.net/profile/Tao-Wang-261
1. 研究背景与意义
电子鼻(Electronic Nose, E-nose)作为模拟哺乳动物嗅觉系统的检测工具,广泛应用于食品安全、疾病诊断及环境监测等领域。然而,传统便携式电子鼻系统因微控制器(MCU)计算能力受限,只能采用简单的模式识别算法,且传感器间高度耦合,系统抗故障能力差。为此,本文提出一种基于边缘计算、集成学习与传感器集群的新型便携式电子鼻系统架构,旨在提升系统的识别准确性、容错能力与应用灵活性。
2. 系统设计与实验方法
2.1 硬件设计
便携式电子鼻系统包括五大模块:传感器阵列、前端模拟电路、MCU子系统、通信子系统与电源管理模块(如图1(a)所示)。传感器阵列由8种MEMS气体传感器组成,具体型号与敏感气体信息列于表1。系统采用ARM Cortex-M3 MCU实现数据采集与边缘计算,支持USB和蓝牙通信。

图1 (a) 便携式电子鼻系统功能框图;(b) 不同配置电子鼻设备实物图;© 实验装置简化结构示意。
2.2 自动化测试平台
利用自制的无人工测量系统(Workflow脚本控制),对15种VOCs气体进行气敏测试,浓度范围10–100 ppm,步长10 ppm,每种气体独立重复测试10次。
2.3 数据处理流程
数据处理流程包括:基线跟踪(BTA)、响应计算、相空间映射与特征提取(如图3(a)(b)所示)。响应值定义为空气电阻(Ra)与目标气氛电阻(Rg)之比,进一步提取五个关键特征:最大响应速率、初始响应值、最大响应值、最小恢复速率及对应响应值。
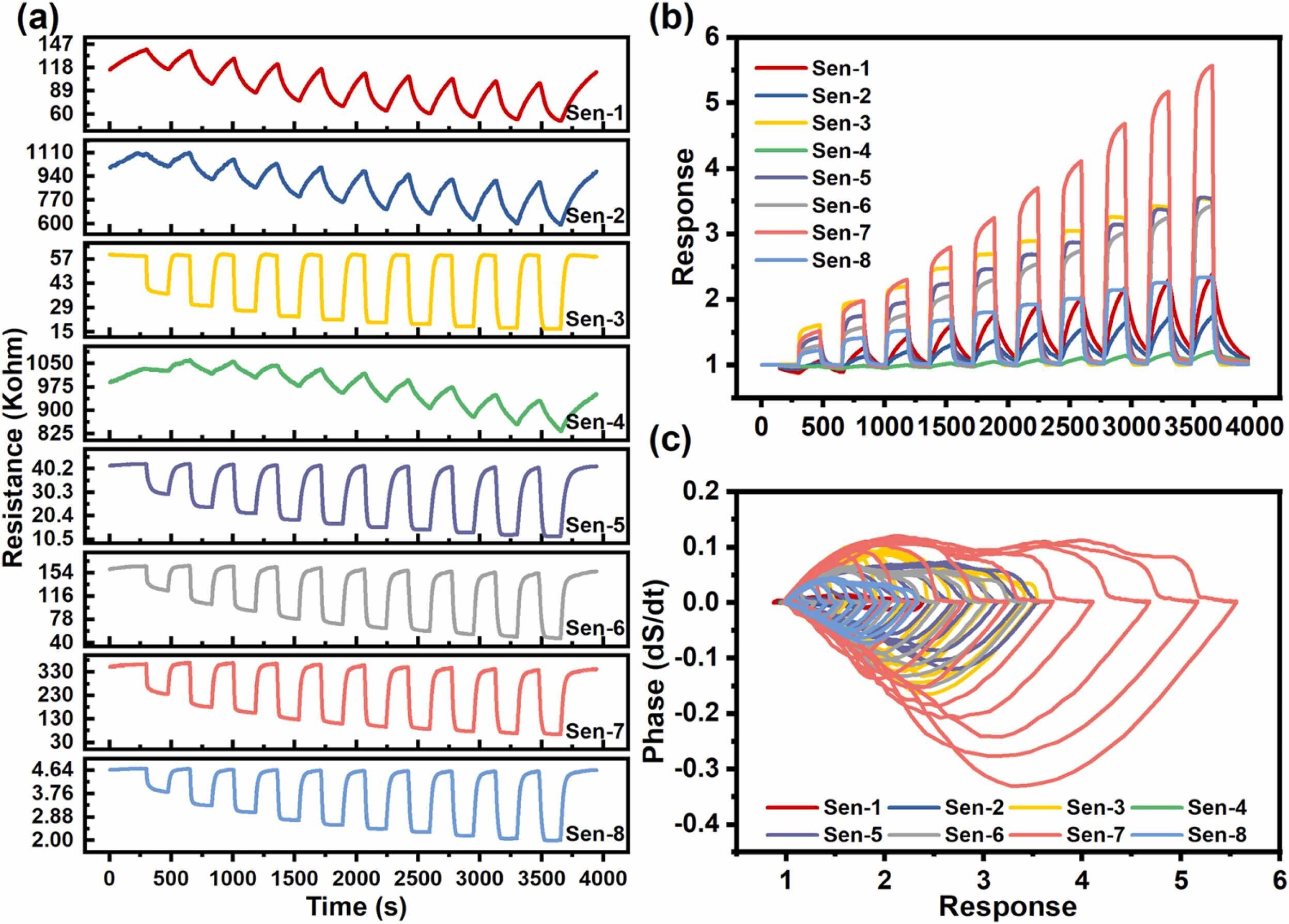
图2 (a) 八个传感器原始电阻信号;(b) 经基线跟踪后的响应曲线;© 相空间转换后的特征轨迹。
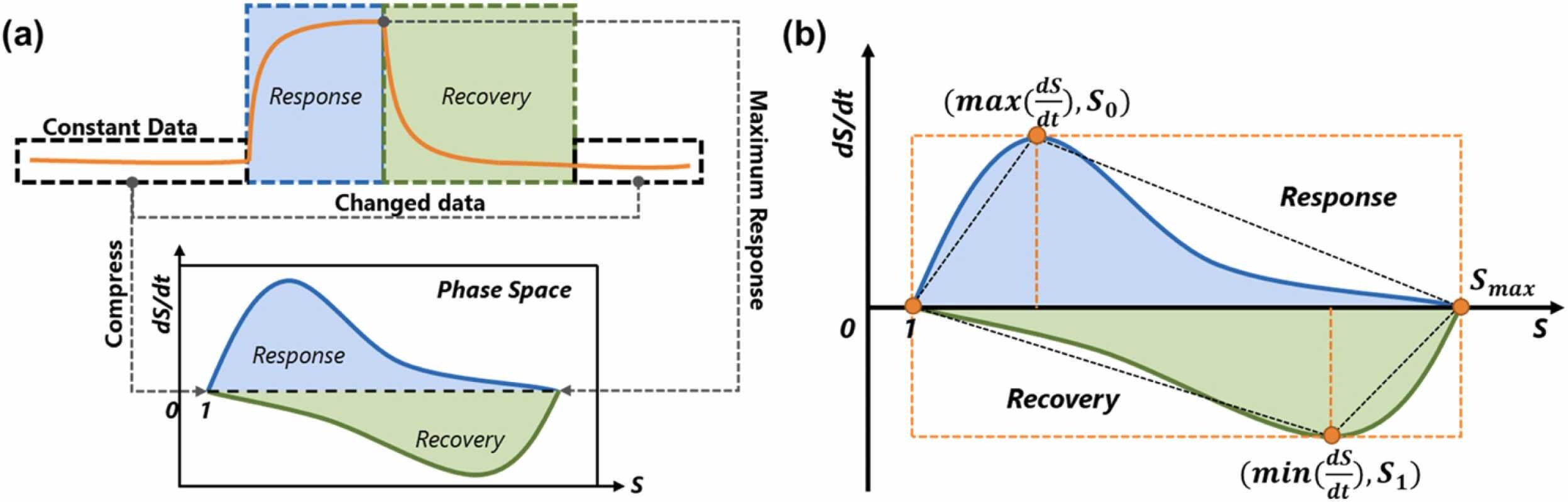
图3 (a) 响应数据向相空间映射示意;(b) 相空间中定义的五个特征点。
3. 边缘计算与模型设计
3.1 ANN模型结构
分别设计分类与回归人工神经网络(ANN)模型(如图4(a)所示),均为三层结构,分类模型输出15类气体概率,回归模型直接预测气体浓度。
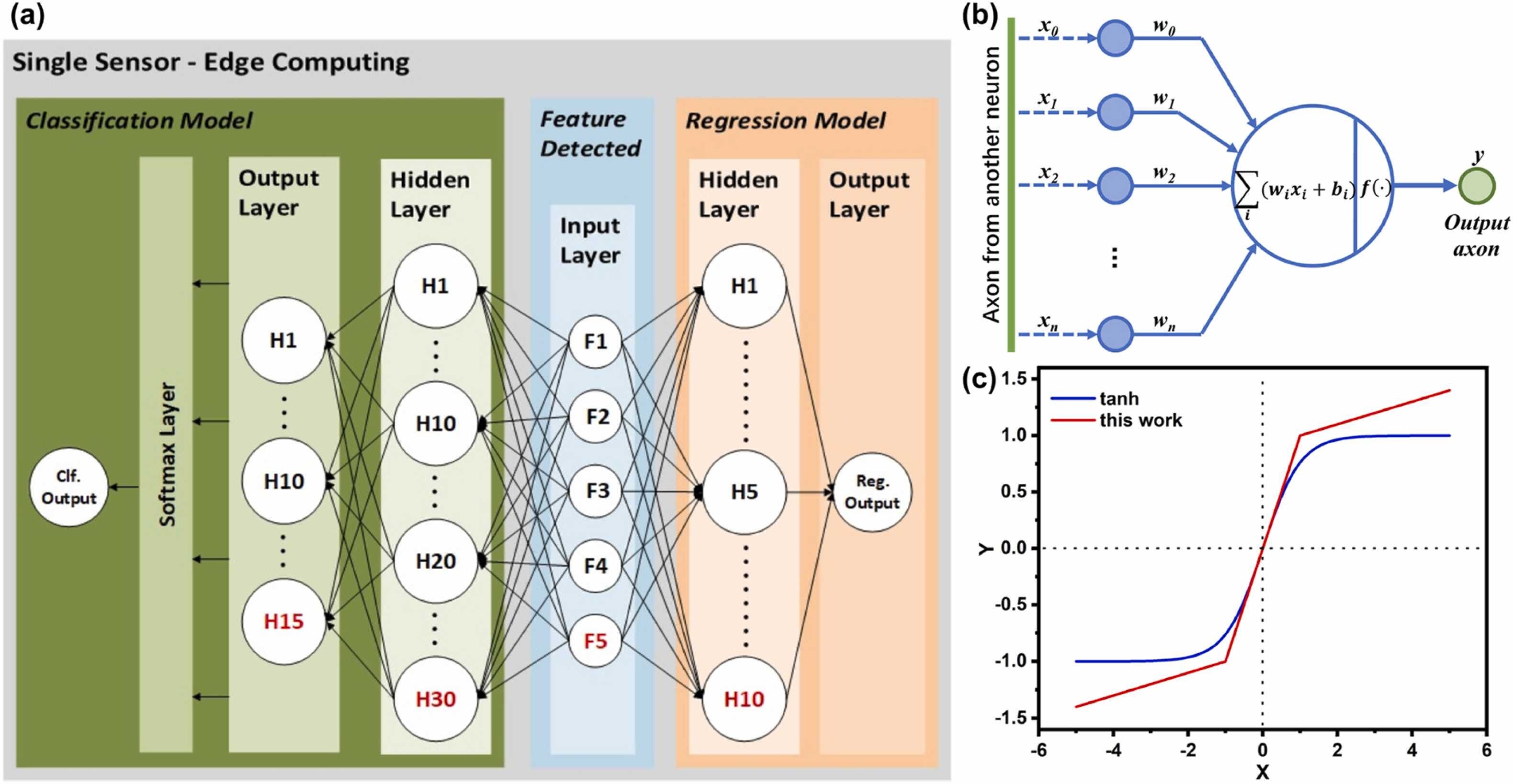
图4 (a) 分类与回归模型节点连接结构;(b) 单个神经元结构示意;© 简化版tanh激活函数曲线。
3.2 分类与回归性能
所有模型均在MCU上本地训练完成,训练100次迭代后性能收敛稳定。分类准确率介于30%–60%,浓度预测的R2得分最高可达0.98。
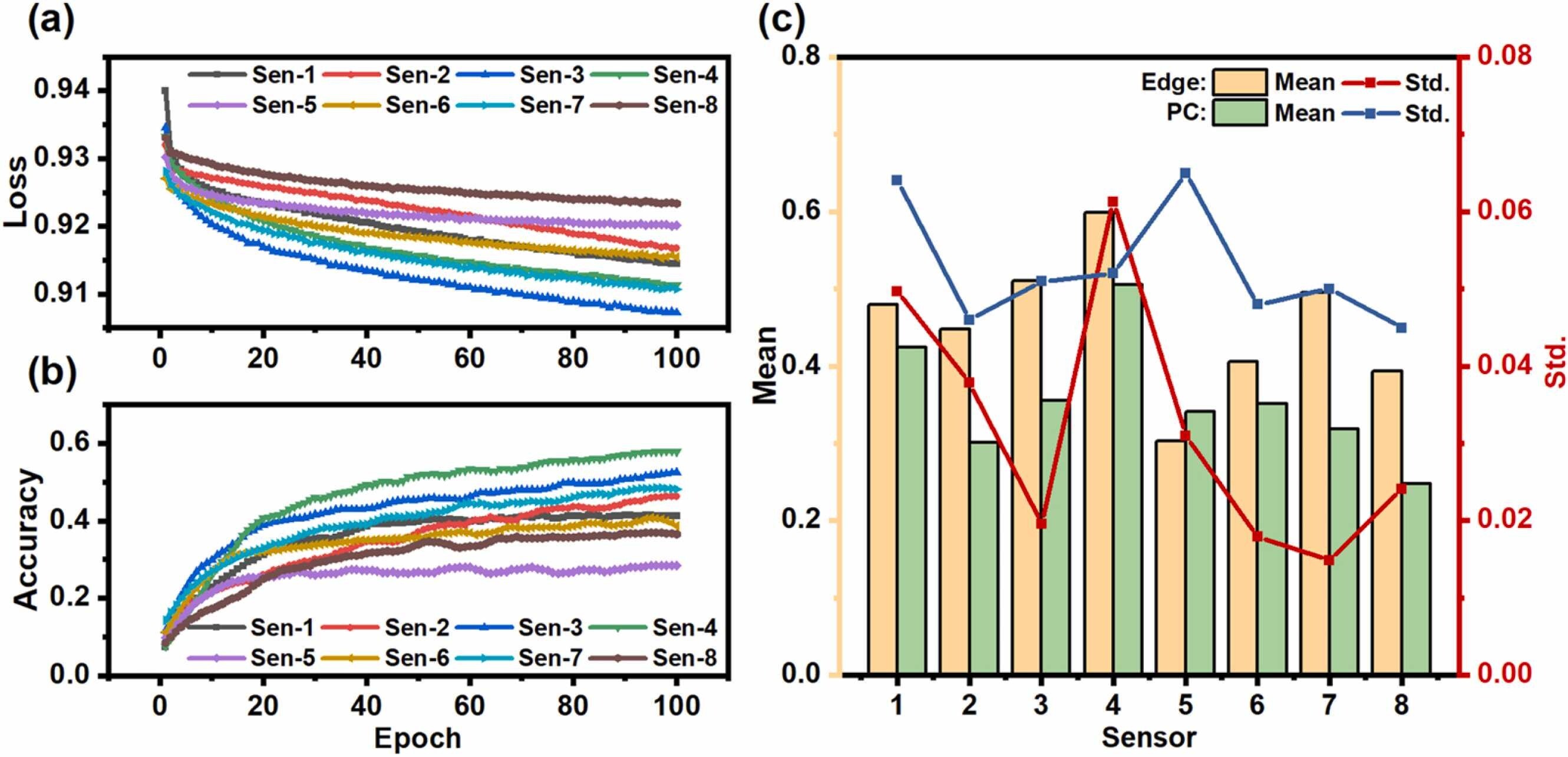
图5 分类模型训练过程中的损失曲线与准确率曲线,以及MCU与PC训练模型准确率对比。
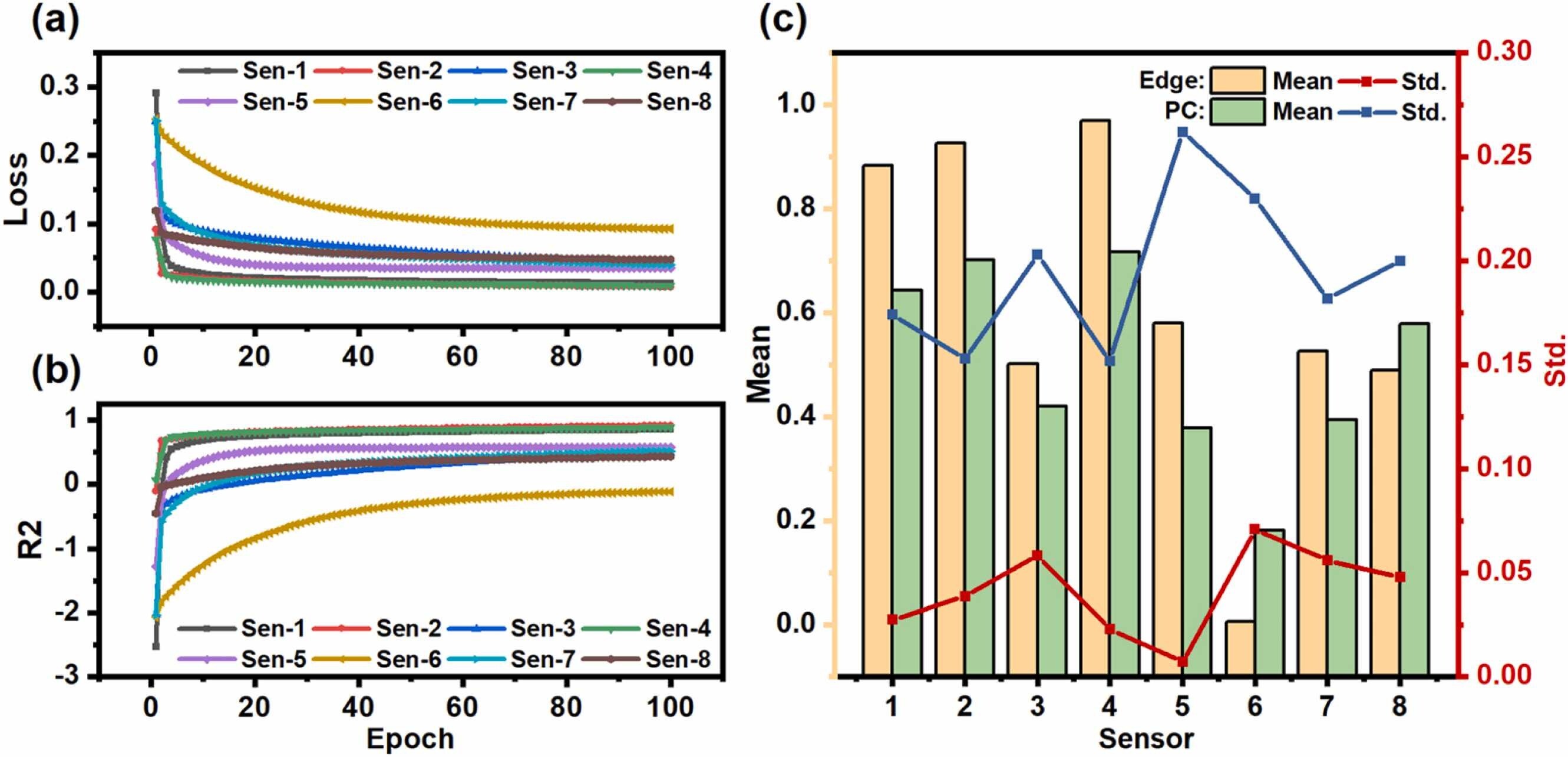
图6 回归模型训练过程中的损失曲线与R2得分曲线,以及MCU与PC训练模型性能对比。
4. 集成学习与性能提升
4.1 集成分类器
采用软投票(Soft Voting)集成8个独立分类器,最终准确率从最佳单一传感器的58.0%提升至81.1%。
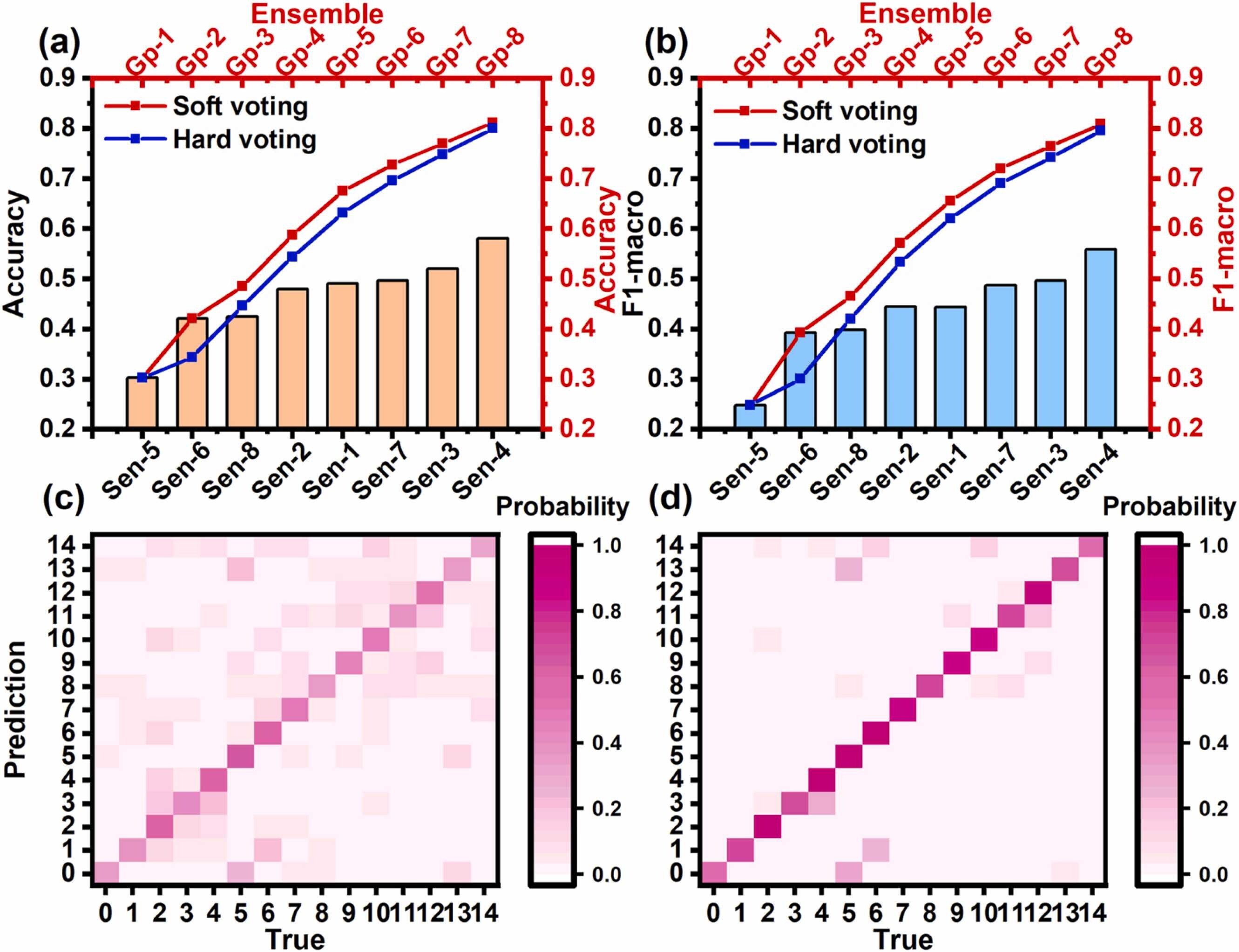
图7 (a)(b) 集成前后分类准确率与F1分数对比;©(d) 单一传感器与集成分类器的混淆矩阵对比。
4.2 集成回归器
采用加权平均方法集成7个回归器(剔除性能差的Sen-6),浓度预测的R2得分由最高57.7%提升至84.1%。
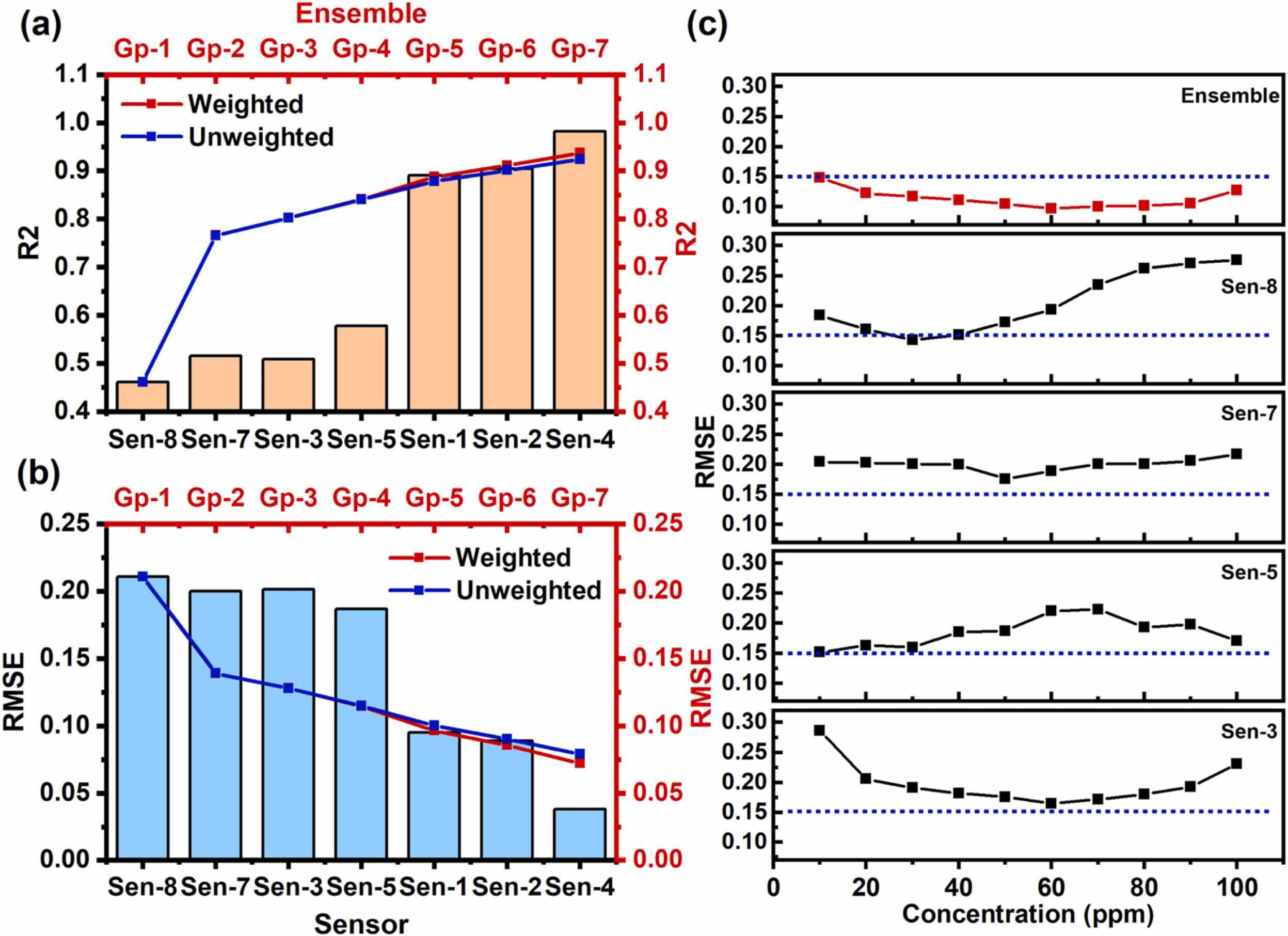
图8 (a) 不同组合的回归器R2得分对比;(b) RMSE误差对比;© 不同气体浓度下误差曲线。
4.3 集成学习的局限性分析
分析表明,低性能传感器参与过多会影响集成效果,合理筛选参与模型至关重要。
5. 传感器集群与弹性架构设计
本文提出基于独立ANN模型与集成策略的**传感器集群(Sensor Swarm)**概念,实现每个传感器独立感知、独立决策,系统整体具备高容错性与灵活扩展性。
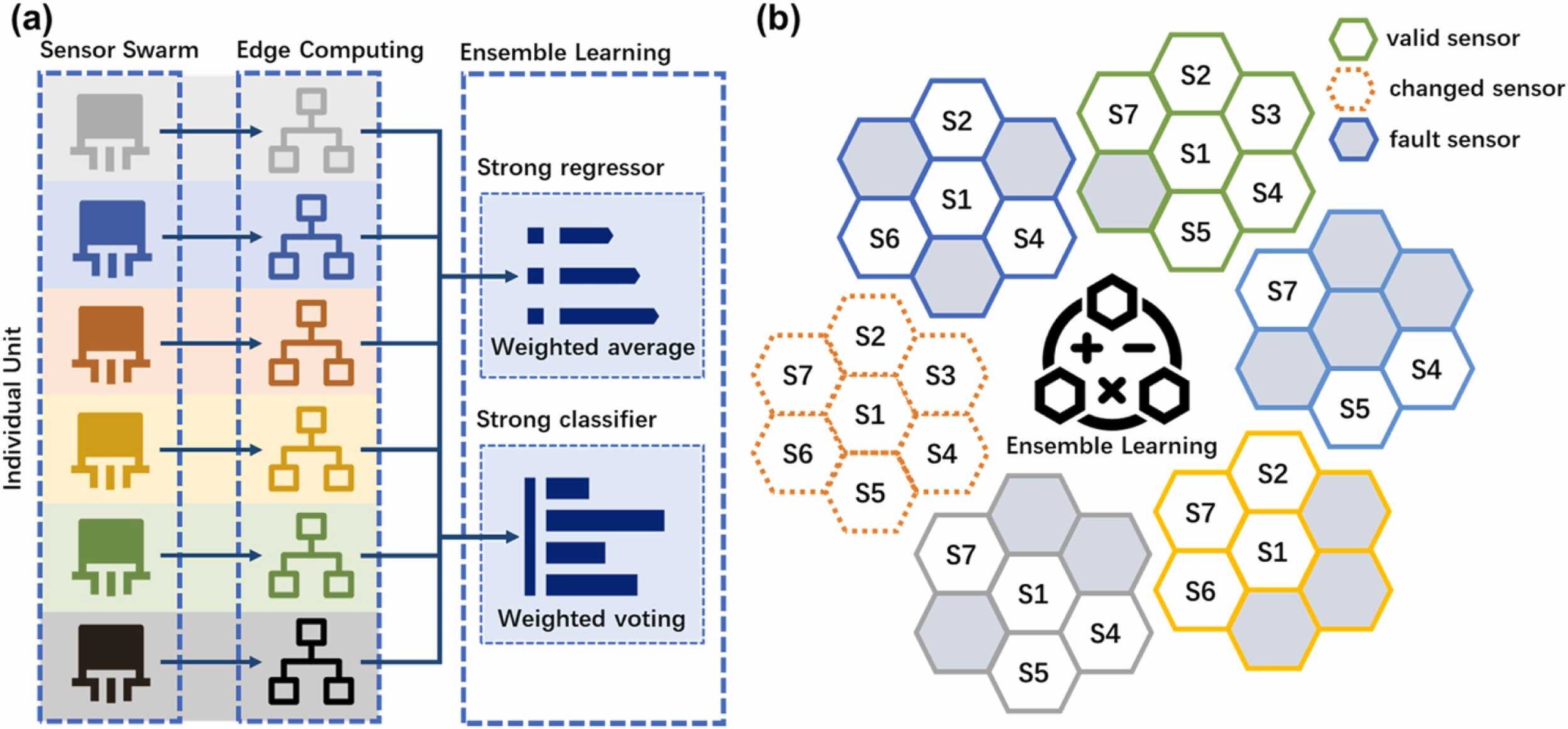
图9 (a) 传感器集群内部实现机制;(b) 弹性架构及容错机制示意。
与传统阵列模式相比,传感器集群架构在单点故障时准确率下降幅度减少约10倍,回归精度下降幅度减少约18倍。
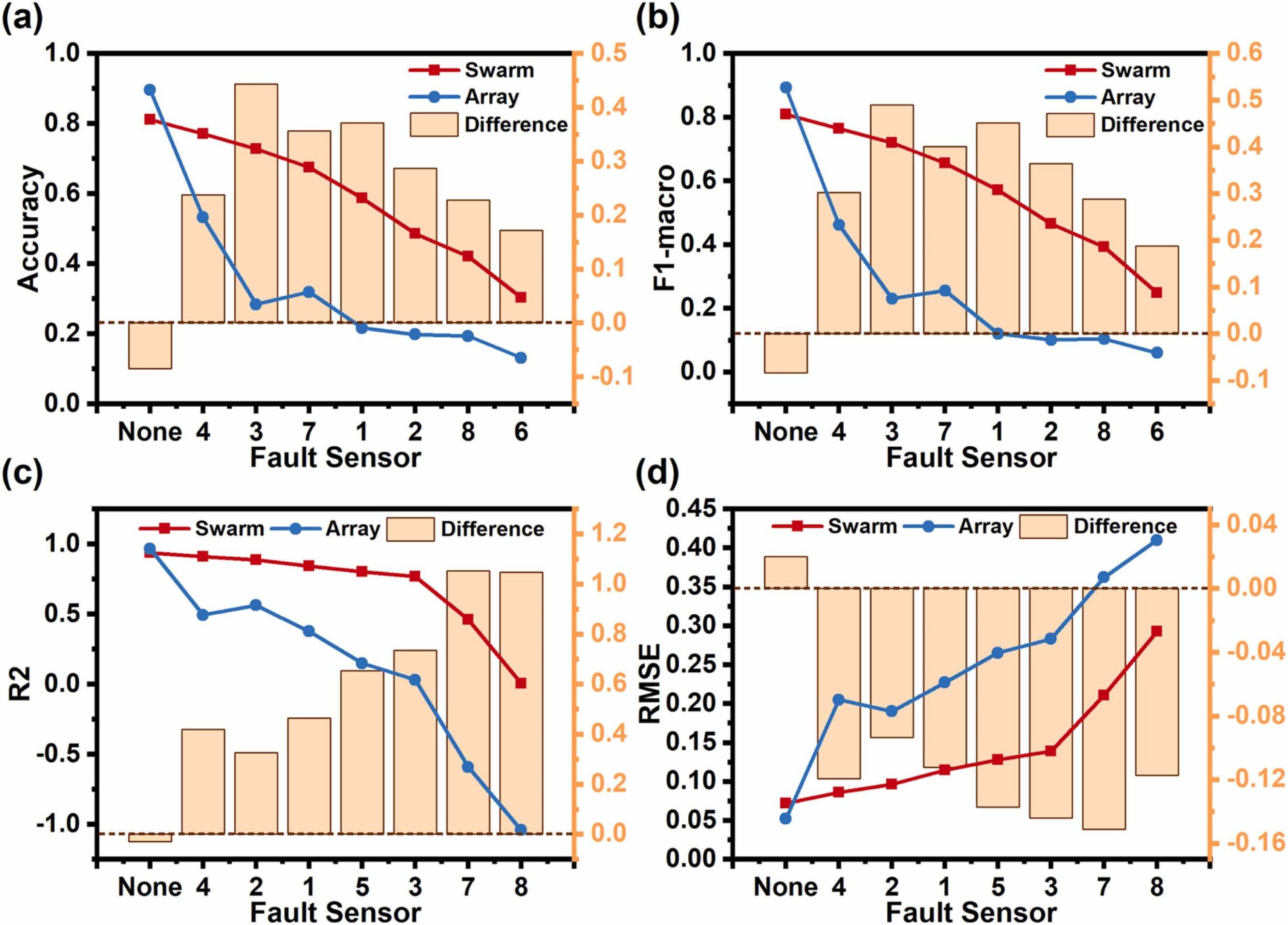
图10 (a)(b) 分类任务中不同故障条件下准确率与F1分数变化;©(d) 回归任务中不同故障条件下R2得分与RMSE变化。
6. 结论
本文开发了一种结合边缘计算、独立ANN模型、集成学习与传感器集群的便携式电子鼻系统。该系统在保证高准确率与浓度预测能力的同时,大幅度提升了系统的容错能力与弹性扩展能力,为未来高可靠性便携式电子鼻系统的发展提供了新的思路与技术路径。