2025上海车展| 和芯星通发布覆盖车载全场景的产品方案
2025上海车展充满科技范儿,更加聚焦用户价值与安全性。智能化、电动化进一步深入融合,呈现辅助驾驶成熟量产化、舱驾融合一体化、产业链创新本土化、跨界融合生态化的趋势。
与其他辅助驾驶系统传感器相比,GNSS卫星定位能够提供独立于外部地标绝对位置,且不受天气和光线条件限制,是车辆感知自身在全球坐标系中精确位置的核心能力。展会期间,和芯星通发布了覆盖车载全场景的GNSS系列产品及方案,全方位满足IVI、TCU、ADAS三大车载市场多样用户需求,为智能汽车未来发展注入强劲动力。

智能座舱:产品性能可靠,客户基石稳固,家族再添新成员
智能座舱系列产品方案,除基于和芯星通完全自主知识产权的UFirebird单频和UFirebirdII双频两大芯片平台,新一代UFirebirdIV多系统单频车载定位芯片及系列模块也悉数亮相。进一步完善了和芯星通面向全球座舱应用的产品谱系,为客户提供了更加丰富多样的选择,满足不同层次、不同场景的定位需求,助力智能座舱技术的持续升级与创新。
和芯星通座舱系列单频定位模块双频定位模块凭借稳定可靠的导航定位性能、卓越的产品质量,在智能座舱、T-Box、车辆监控系统等应用具备丰富的量产交付经验。


智能驾驶:市场格局多元,品类精准匹配,安全可信更卓越
智能驾驶市场呈现出多元化的格局,主要分为 L2.5+辅助驾驶、L3 级智能驾驶市场和 L4-L5 无人驾驶市场。在这一背景下,和芯星通深入洞察市场需求,针对智能驾驶领域的主流需求,精心打造了涵盖双频、多频应用的三种产品类型,包括 RTK 输出类的 UM980A、UM680A,观测量输出类的UM690A 和 UM670A,以及 DR 融合解类的UM681A 和 UM671A,为各类智能驾驶场景提供精准且高效的位置解决方案。

UM680A 系列双频模块具备厘米级 RTK 定位精度及可信的定位置信度,能够为智能驾驶系统提供高精度的位置信息,确保车辆在复杂路况下的精准导航与安全行驶。UM670A 系列双频模块则提供高质量的双频原始观测量以及低延时数据输出,广泛应用于组合辅助驾驶的域控制器和 P-BOX 等载体,并被众多知名品牌量产车型所采用,深受市场认可。
而 UM681A/UM671A 等惯导模块则展现了强大的兼容性与适应性,在卫星信号受阻的情况下,依然可以为车辆提供连续的导航信息,进一步提升了定位的可靠性和稳定性,确保车辆在各种复杂环境下都能保持精准的导航。
UM980A和UM690A可支持 L1+L2+L5,在城市峡谷等无信号复杂环境下,能够提供更多的频率选择,同时提供厘米级的极致定位精度。客户可以灵活使用和芯星通的 RTK 算法,以及三频原始观测量输出匹配软件算法,进一步提升系统的性能与可靠性。在L2+辅助驾驶域控制器、P-BOX,以及 L4 级别Robotaxi应用中表现了卓越性能与广泛适用性。此外,在末端物流、无人城配、无人环卫、无人港口、无人矿山、eVTOL等自动驾驶场景, 和芯星通的高精度系列产品表现出众。
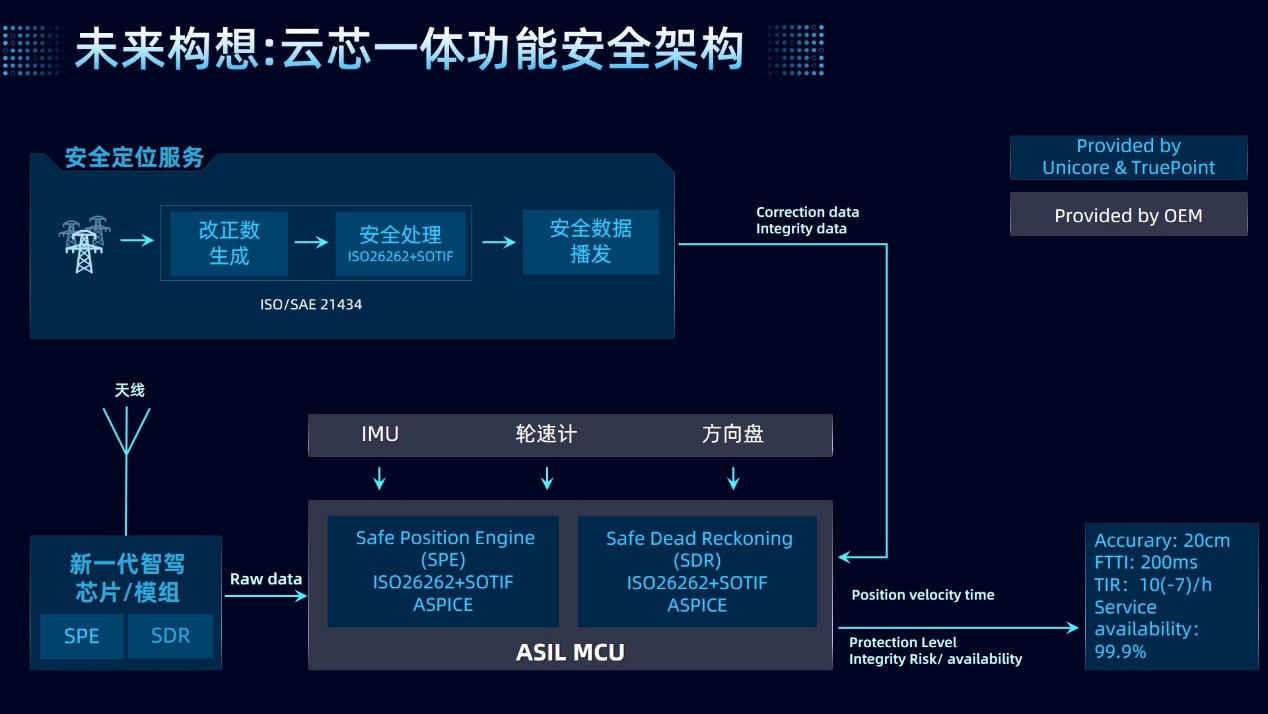
云芯一体的智能位置数字底座
作为国内首个通过AEC-Q100车规级芯片认证的国产卫星导航公司,和芯星通目前已经获得了ISO26262功能安全体系认证。未来还将面向车载客户提供云芯一体的功能安全方案,可以更系统性地输出辅助驾驶需求的精准位置信息,简化Tier1客户的使用模式,降低OEM车厂的成本,帮助客户更简单地排查问题和更快速地迭代算法软件。
公司在车载领域已经拥有10余年稳定出货历史,与全球领先的Tier1供应商和OEM厂建立了深度合作关系,未来将继续携手产业链上下游合作伙伴,服务汽车行业客户前瞻发展。
后记:实至名归:2025年度影响力汽车芯片——UFirebird II
作为和芯星通智能座舱和辅助驾驶两大系列模块产品的主要芯片平台,和芯星通“UFirebird II (UC6580A) 双频多系统GNSS SoC芯片凭借其在车载座舱及辅助驾驶市场的高性能、高可靠、高稳定、以及高客户认可度和高市占率,获得 “2025年度影响力汽车芯片”奖。