目录
一、初始问题
二、解决方法
2.1 法一
2.2 法二
三、新的问题
3.1 解决方案
3.2 进一步解决
3.3 最后解决
一、初始问题
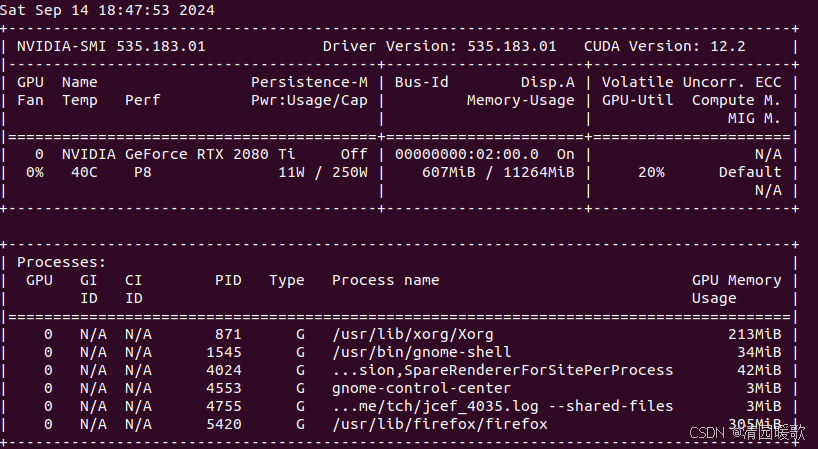
今天要在本机上装个环境时,运行了一下 nvidia-smi 突然遇到一个问题:
Failed to initialize NVML: Driver/library version mismatch
然后查找解决方案,找到这个博主的方法:
已解决【nvidia-smi】Failed to initialize NVML: Driver/library version mismatch解决方法_nvidia-smi version mismatch-CSDN博客
输入:
dpkg -l | grep nvidia可以看到对应的nvidia驱动的版本号
然后查看内核的版本:
cat /proc/driver/nvidia/version![]()
看到我的是 535.183.01,可能是和 nvidia 驱动版本号不一致的问题,后面查找时一些博主说是由于 ubuntu 20.04 自动更新导致,所以最后可以关掉自动更新,这里先不赘述。
二、解决方法
2.1 法一
上面的博客中说到一个简单直接的方法,即重启,reboot,重启后系统会自动更新内核使得版本一致。然后就可以解决
但我因为在用服务器跑代码,在看,就想着不用重启的方法。。。后悔!
不过重启的方法我没试过,不知道是不是能解决。
2.2 法二
采用指令退出当前内核使用的显卡模块,然后重新加载升级后版本的显卡驱动作为内核模块。
sudo rmmod nvidia
sudo nvidia-smi但 sudo rmmod nvidia 就遇到问题:
$ sudo rmmod nvidia
rmmod: ERROR: Module nvidia is in use by: nvidia_modeset nvidia_uvm说明我们正在使用,所以需要手动退出nvidia_uvm, nvidia_modeset服务。
查看nvidia模块使用情况:
$lsmod | grep nvidia
nvidia_uvm 94718 0
nvidia_drm 531248 0
nvidia_modeset 79588287 1 nvidia_drm
nvidia 121440 132 nvidia_modeset,nvidia_uvm 12899044640 132 nvidia_modeset,nvidia_uvm
用 kill -9 PID 终止进程,但我一直显示找不到进程,就强制终止:
sudo -f rmmod nvidia_uvm
sudo -f rmmod nvidia_drm
sudo -f rmmod nvidia_modeset
sudo rmmod nvidia再输入:
sudo nvidia-smi没有解决,就重启,发现又出现了新的问题:
NVIDIA-SMI has failed because it couldn't communicate with the NVIDIA driver. Make sure that the latest NVIDIA driver is installed and running.
三、新的问题
3.1 解决方案
根据这篇博客:nvidia-smi报错:NVIDIA-SMI has failed because it couldn‘t communicate with the NVIDIA driver 原因及避坑解决方案_nvidia-smi has failed because it couldn't communic-CSDN博客
说到还是驱动的问题。
(1)安装 dkms
sudo apt-get install dkms(2)查看本机连接不上的驱动版本:
ls -l /usr/src/
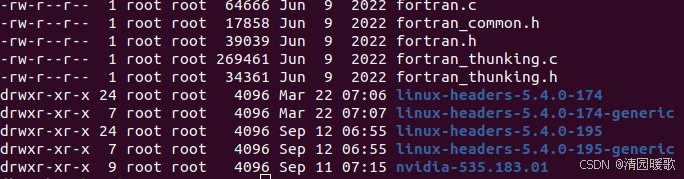
可以看到我的版本是 nvidia-535.183.01
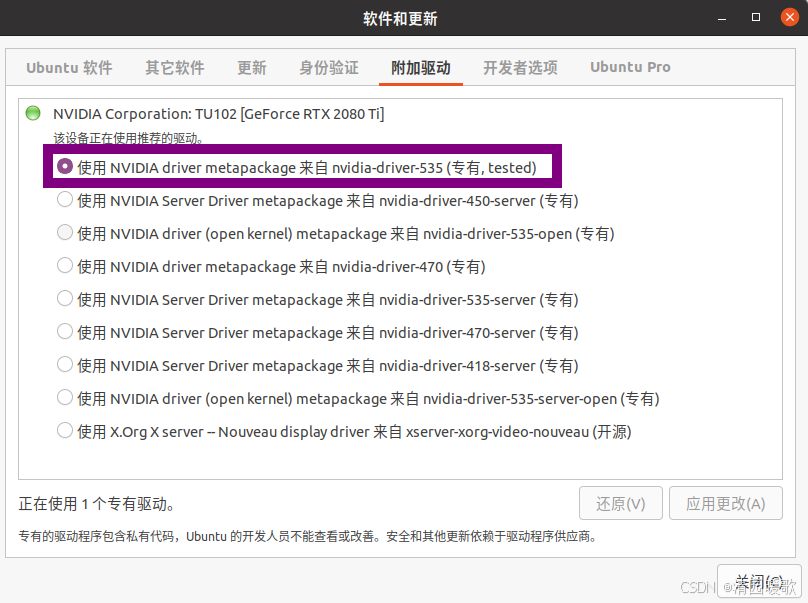
如果没有 nvidia-535.183.01 这类文件,可以打开 ubuntu 的软件与更新,手动安装
安装完成后在 /usr/src/ 目录下就会有 nvidia-535.183.01 文件。
(3)使用dkms重新安装适合驱动:
sudo dkms install -m nvidia -v 535.183.01如果安装成功,那么恭喜,已经可以 nvidia-smi 了
3.2 进一步解决
如果和我一样,安装失败,那么继续吧!
还是这个博主的文章:nvidia-smi报错:NVIDIA-SMI has failed because it couldn‘t communicate with the NVIDIA driver 原因及避坑解决方案_nvidia-smi has failed because it couldn't communic-CSDN博客
输入:
gcc --version查看 gcc 版本。
如果你的gcc(尽量大于7.3版本)版本过低,那么上述命令sudo dkms install -m nvidia -v 470.103.01失败的原因就找到了。
(注意,这里up安装时层层报错,如果不按这个安装,可以直接跳转到 3.3 ,另一种方法安装,一步解决)
下面安装gcc7.5版本:
(1)下载gcc,输入命令:
cd /usr/local/src/wget http://ftp.gnu.org/gnu/gcc/gcc-7.5.0/gcc-7.5.0.tar.xz tar xvfgcc-7.5.0.tar.xz(2)安装gcc的依赖软件,gcc的软件包内提供了自动下载需要软件的脚本,命令如下:
cd gcc-7.5.0/./contrib/download_prerequisites这里也可能出现问题,大概是如下的错误,因为小编这里的错误当时没保存,所以参考这篇文章:Ubuntu 16.04系统中GCC 9.1编译器安装方法及C++17标准测试示例-CSDN博客
configure: error: Building GCC requires GMP 4.2+, MPFR 2.4.0+ and MPC 0.8.0+.
Try the --with-gmp, --with-mpfr and/or --with-mpc options to specify
their locations. Source code for these libraries can be found at
their respective hosting sites as well as at
ftp://gcc.gnu.org/pub/gcc/infrastructure/. See also
http://gcc.gnu.org/install/prerequisites.html for additional info. If
you obtained GMP, MPFR and/or MPC from a vendor distribution package,
make sure that you have installed both the libraries and the header
files. They may be located in separate packages.
使用vi编辑器打开依赖包下载脚本文件:contrib/download_prerequisites
将该文件里的 base_url='ftp://gcc.gnu.org/pub/gcc/infrastructure/' 替换为:base_url='http://mirror.linux-ia64.org/gnu/gcc/infrastructure/',即将不存在的服务器地址替换为镜像服务器地址。
然后再
./contrib/download_prerequisites如果提示如下信息,则代表下载并解压成功:
2018-03-24 21:01:37 URL:http://mirror.linux-ia64.org/gnu/gcc/infrastructure/gmp-6.1.0.tar.bz2 [2383840/2383840] -> "./gmp-6.1.0.tar.bz2" [1]
2018-03-24 21:01:46 URL:http://mirror.linux-ia64.org/gnu/gcc/infrastructure/mpfr-3.1.4.tar.bz2 [1279284/1279284] -> "./mpfr-3.1.4.tar.bz2" [1]
2018-03-24 21:01:51 URL:http://mirror.linux-ia64.org/gnu/gcc/infrastructure/mpc-1.0.3.tar.gz [669925/669925] -> "./mpc-1.0.3.tar.gz" [1]
2018-03-24 21:01:58 URL:http://mirror.linux-ia64.org/gnu/gcc/infrastructure/isl-0.16.1.tar.bz2 [1626446/1626446] -> "./isl-0.16.1.tar.bz2" [1]
gmp-6.1.0.tar.bz2: 确定
mpfr-3.1.4.tar.bz2: 确定
mpc-1.0.3.tar.gz: 确定
isl-0.16.1.tar.bz2: 确定
All prerequisites downloaded successfully.
如果出现如下信息,则表示包:gmp-6.1.0.tar.bz2没有下载成功:
2018-03-24 20:54:39 URL:http://gcc.parentingamerica.com/infrastructure/mpc-1.0.3.tar.gz [669925/669925] -> "./mpc-1.0.3.tar.gz" [1]
2018-03-24 20:56:16 URL:http://gcc.parentingamerica.com/infrastructure/isl-0.16.1.tar.bz2 [1626446/1626446] -> "./isl-0.16.1.tar.bz2" [1]
gmp-6.1.0.tar.bz2: 失败
sha512sum: 警告:1 个校验和不匹配
error: Cannot verify integrity of possibly corrupted file gmp-6.1.0.tar.bz2
这是因为网络连接不正常造成的,解决方案是,进入目录 “/home/davidhopper/code/gcc/gcc-7.3.0”,手动将已下载的“mpc-1.0.3.tar.gz”、“isl-0.16.1.tar.bz2”文件删除,重新执行
./ contrib/download_prerequisites 命令下载。如果仍然提示失败,则应使用vi编辑器修改 contrib/download_prerequisites
文件里的 base_ur=... 换为另一个能够正常连接并下载的镜像服务器地址。
或者使用笨方法:
进入镜像服务器网址:Index of /gnu/gcc/infrastructure,手动下载,并建立链接
cd ~/code/gcc/gcc-7.3.0
tar zxvf gmp-6.1.0.tar.gz
tar zxvf mpfr-3.1.4.tar.gz
tar zxvf mpc-1.0.3.tar.gz
ln -s gmp-6.1.0 gmp
ln -s mpfr-3.1.4 mpfr
ln -s mpc-1.0.3 mpc
随后即可
(3)生成Makefile文件,输入命令:
./configure -enable-checking=release -enable-languages=c,c++ -disable-multilib可能会出现如下的问题:
configure: error: in `/root/dev_env/ffmpeg-static/build/libpng-1.2.58':
configure: error: C compiler cannot create executables
See `config.log' for more details
查看 config.log ,发现:
collect2: ld returned 1 exit status
可能是要安装 openssl-devel,但up又失败了!!!
3.3 最后解决
这是一个师兄提供的方法,另一种方式安装 gcc
到这里:GitHub - gaoxiang12/slam_in_autonomous_driving: 《自动驾驶中的SLAM技术》对应开源代码
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo update-alternatives --remove-all gcc
sudo update-alternatives --remove-all g++#命令最后的1和10是优先级,如果使用auto选择模式,系统将默认使用优先级高的
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-7 1
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-9 10sudo update-alternatives --install /usr/bin/g++ g++ /usr/bin/g++-7 1
sudo update-alternatives --install /usr/bin/g++ g++ /usr/bin/g++-9 10注意:
这里:sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-7 1
好像最好一行一行的输入

然后重启,即可 nvidia-smi
最后还可以关闭自动更新







![[通信原理]绪论2:信息量 × 信息熵](https://i-blog.csdnimg.cn/direct/1eb1b28eb23d4fd0a4072f2cbf85a5c1.jpeg)