0.序言
- 原文链接:教你本地化部署一个QQ机器人
- 本教程主要面向Windows系统用户
- 教程从0开始全程详细指导,0基础萌新请放心食用🍕
- 如果你遇到了问题,请仔细检查是否哪一步有遗漏。
- 如果你确定自己的操作没问题,可以到原文链接下的评论区提问:教你本地化部署一个QQ机器人 ,注意留言时请填写正确的邮箱以确保能收到站长的回复。
1.搭建前的准备工作:
1.1.需要用到的工具
- 一台24小时开机联网的服务器/计算机
- 操作系统:Windows10
- 文本编辑器(强烈推荐使用VSCode)
- Python3.11.5
- 一个闲置的QQ账号
1.2.Python安装指南
参考我的这篇文章:Python安装指南
10月2日发布了Python3.12.0版本,站长在10月5日安装机器人框架依赖时会报以下错误:
ERROR: Could not build wheels for yarl, httptools, multidict, which is required to install pyproject.toml-based projects
安装依赖失败! 请手动安装依赖.
尝试了几种方法没有解决,故使用之前成功过的Python3.11.5版本。
Python 3.11.5官方下载链接:Python 3.11.5
国内下载速度可能会有点慢,有条件的可以通过国际网络访问。
站长这里提供Windows64位版本的下载:python-3.11.5-amd64
1.3.VSCode安装指南
VSCode是一款轻量化的IDE,支持市面上绝大多数编程语言,具有良好的扩展性,且具有非常友好的代码补全功能。是CC站长的最爱
下载完成后直接一路确定傻瓜式安装即可//部分自定义配置说明如下:

VSCode官网:Visual Studio Code
同样国内下载比较慢,站长这里提供Windows64位1.82.2版本的下载,VSCode支持软件内更新到最新版本:VSCodeUserSetup-x64-1.82.2
2.安装Nonebot框架
2.1.创建文件夹
创建一个文件夹用于存放项目,然后用VSCode打开这个文件夹。

2.2.安装pipx
点击“终端-新建终端”(或直接按住Ctrl+Shift+`)创建一个终端,在终端中输入以下命令:
python -m pip install --user pipx
python -m pipx ensurepath
如果出现以下提示,请调整你的账户环境变量:

调整账户的环境变量参考我的这篇文章:Python安装指南的第三节
安装完成后,关闭当前VSCode窗口,重启VSCode后才会生效。
2.3.安装Nonebot脚手架
创建一个终端,在终端中输入以下命令:
pipx install nb-cli

如果出现无法找到pipx命令的情况(例如出现“Command not found”字样),请确认你在上一步中账户环境变量设置正确,且完全重启VSCode。
如果你确信自己的所有配置完全正确,请尝试重启你的计算机。
3.创建项目
在终端中输入以下命令:
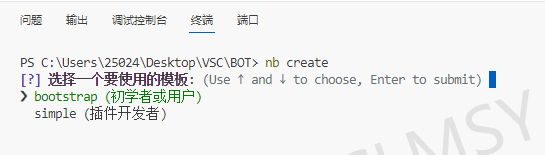
nb create
选择“bootstrap (初学者或用户)”,回车。
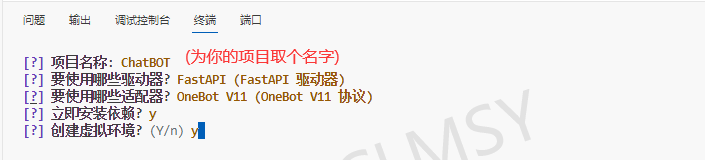
等待资源加载,加载完成后进行如下配置:
(键盘上下键移动光标,空格选中,回车确认)
[?] 项目名称: [为你的项目取个名字吧!] (项目名称建议由英文字母和数字构成,因为部分插件可能不支持包含中文的路径)
[?] 要使用哪些驱动器? FastAPI (FastAPI 驱动器)
[?] 要使用哪些适配器? OneBot V11 (OneBot V11 协议)
[?] 立即安装依赖? y
[?] 创建虚拟环境? y
脚手架会自动创建并引入所需的依赖包。
最后选择安装内置插件echo,这是一个简单的复读回显插件,可以用于测试你的机器人是否正常运行:
[?] 要使用哪些内置插件? echo
请注意,如果你这一步没有安装echo,后续将无法进行补装。
如果你操作失误没有安装,请删除当前项目文件夹并返回第3节开头。
出现以下提示则项目创建成功
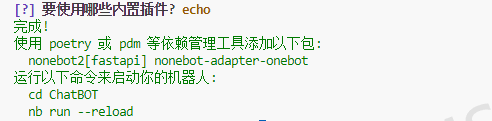
在终端中输入以下命令进入项目文件夹:
cd [你的项目的名字]
请注意:后续的操作均需要你的终端处于项目文件夹中。
如果你使用的是VSCode,方便起见,你可以直接选择打开项目文件夹作为VSCode工作文件夹:
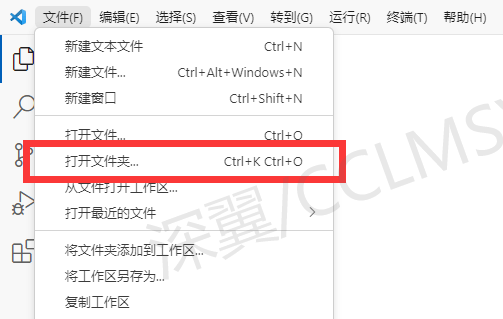
这样后续VSCode新建终端就会默认处于项目文件夹中。
4.编辑配置文件
脚手架会在项目文件夹中自动创建一个配置文件.env.prod,但你仍然需要进行一些自定义配置。
打开项目文件夹下的.env.prod文件,编辑内容如下:
DRIVER=~fastapi # 脚手架自动生成的配置HOST=127.0.0.1 # 配置 NoneBot 监听的 IP / 主机名
PORT=23333 # 配置 NoneBot 监听的端口
其中HOST必须设为127.0.0.1(即localhost)
PORT可以选择你喜欢的数字,范围在0-65535之间。不设置默认为8080,但尽量在15000-50000之间选择,避免和已有的端口发生冲突。
此外,你可以选择设置命令起始字符COMMAND_START和命令分割字符COMMAND_SEP,你可以在有需要使用这些设置的时候再行配置。
设置命令起始字符后,机器人只响应以起始字符开头的命令。
设置命令分割字符后,你可以用一个语句包含多个命令,机器人会先按分割字符将命令分开,再按顺序处理。
COMMAND_START=["/"] # 配置命令起始字符(可选)
COMMAND_SEP=["."] # 配置命令分割字符(可选)
5.安装插件
5.1.管理插件的方法
本节旨在让读者了解操作管理插件的流程,选择自己喜欢的管理插件的方式。
你也可以选择先跳过本节,在后面的教程中会默认提供方法一的命令。
Nonebot提供了三种管理插件的方法,请确保你的终端当前处于项目文件夹中。
其中使用pip安装(方法三)需要手动激活Python虚拟环境,方法一、二管理插件时会自动使用虚拟环境。
5.1.1.方法一:命令行管理
在终端输入以下命令:
nb plugin install <插件名称> # 安装插件
nb plugin uninstall <插件名称> # 卸载插件
nb plugin update <插件名称> # 升级插件
nb plugin list # 列出商店所有插件
nb plugin search [关键词] # 搜索商店插件
5.1.2.方法二:交互式管理
在终端输入以下命令:
nb plugin
将进入控制台交互模式,键盘上下键移动光标,空格选中,回车确认。

按照提示输入插件名称即可。
5.1.3.方法三:使用pip安装
如果你在第3节中正确创建了项目,那么你的项目文件夹中会有一个.venv文件夹,这是项目的Python虚拟环境文件夹。
值得一提的是,虚拟环境是Python提供的一个非常实用的功能,它可以将项目环境和全局环境隔离。
你可以在虚拟环境中安装和管理项目特定的Python库和依赖项,而不会与全局Python环境相互影响。
在终端输入以下命令以激活虚拟环境:
.\.venv\Scripts\activate
如果遇到“禁止运行脚本”的报错,可以参考我的这篇文章来解决:Windows系统无法激活Python虚拟环境的解决方案
如果命令行开头出现一个括号,内容为你的项目名称,则代表Python虚拟环境已经成功激活。
接下来你可以使用pip命令来管理你的插件:
pip install <插件名称> # 安装插件
pip uninstall <插件名称> # 卸载插件
pip install --upgrade <插件名称> # 升级插件
pip list # 列出当前已经安装的插件(包含Nonebot依赖包)
pip相比前两种方法,缺少了列出和搜索商店插件的功能,多了可以查询当前已经安装了的插件的功能。
在忘记已经安装的插件或插件名情况下查询比较方便(当然你也可以自己在.\.venv\Lib\site-packages里查看)。
5.2.安装go-cqhttp
go-cqhttp框架提供了接收QQ事件与调用QQ的API的能力,是QQ机器人的核心组件。
NoneBot插件商店中提供了这个框架的插件,插件名称为:nonebot-plugin-gocqhttp
在终端中输入以下命令安装插件:
nb plugin install nonebot-plugin-gocqhttp
安装完成后,在终端中输入以下命令运行机器人:
nb run
出现以下提示则安装和运行成功:
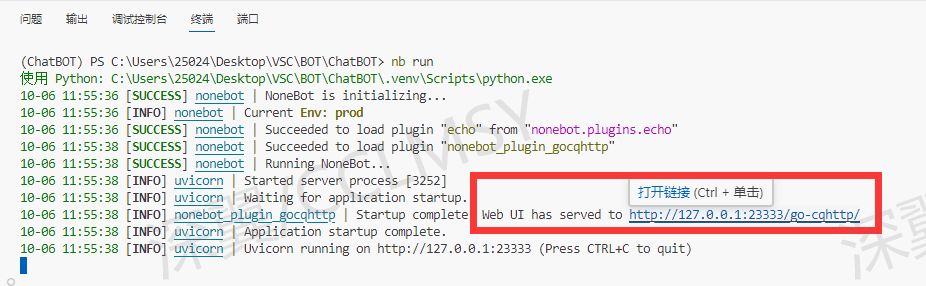
按住Ctrl单击链接进入go-cqhttp的WebUI界面

6.登录QQ机器人与检查
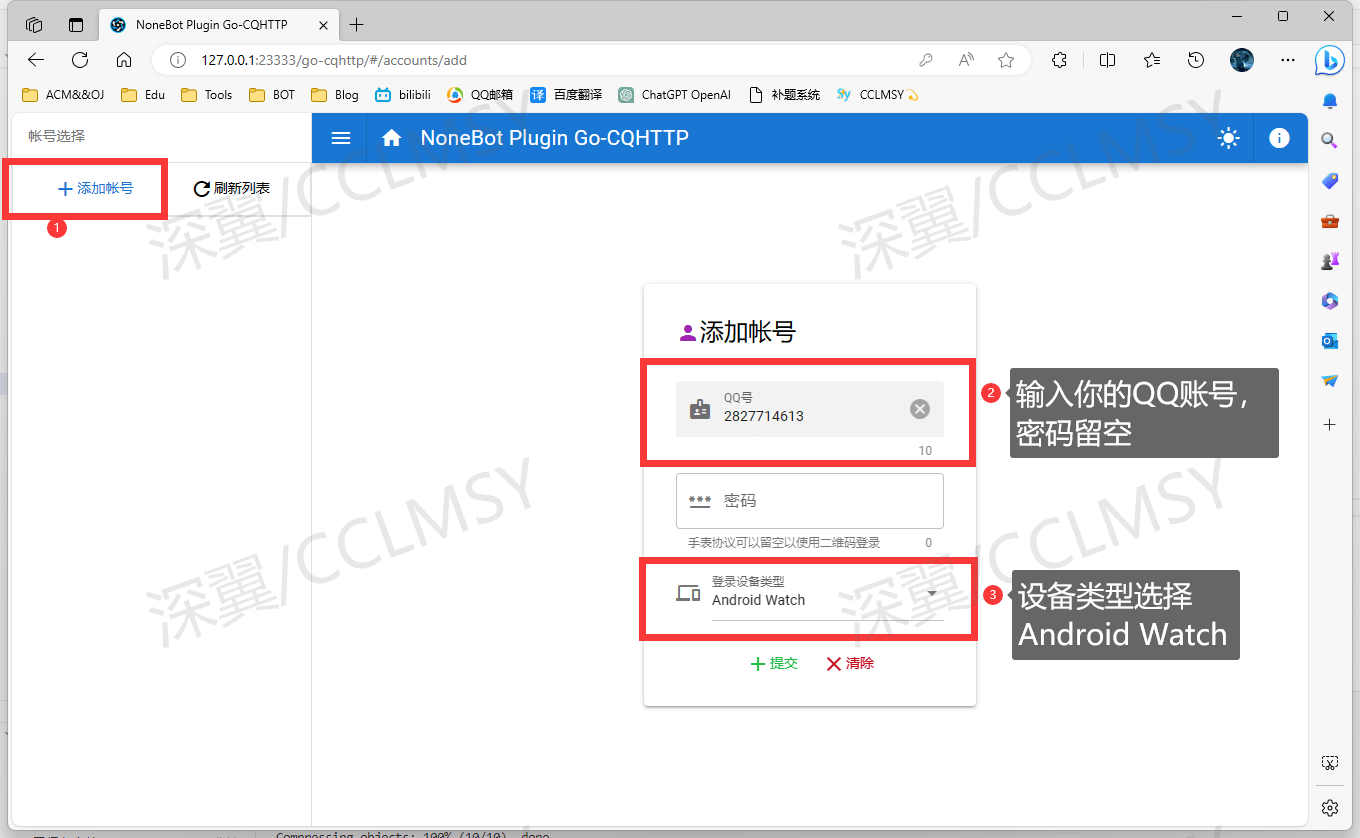
6.1.登录QQ机器人
点击左上角“添加账号”,输入要部署的QQ账号,密码留空,设备类型选择“Android Watch”:
(注:也可以选择账号密码登录,但可能出现账号被风控无法登录的情况,手表协议登录相对比较稳定。)
添加完成后点击启动,待加载出二维码后点击“显示登录二维码”。
用你的手机登录要部署的QQ账号,扫描二维码登录。

登陆完成后会有消息提示如下:

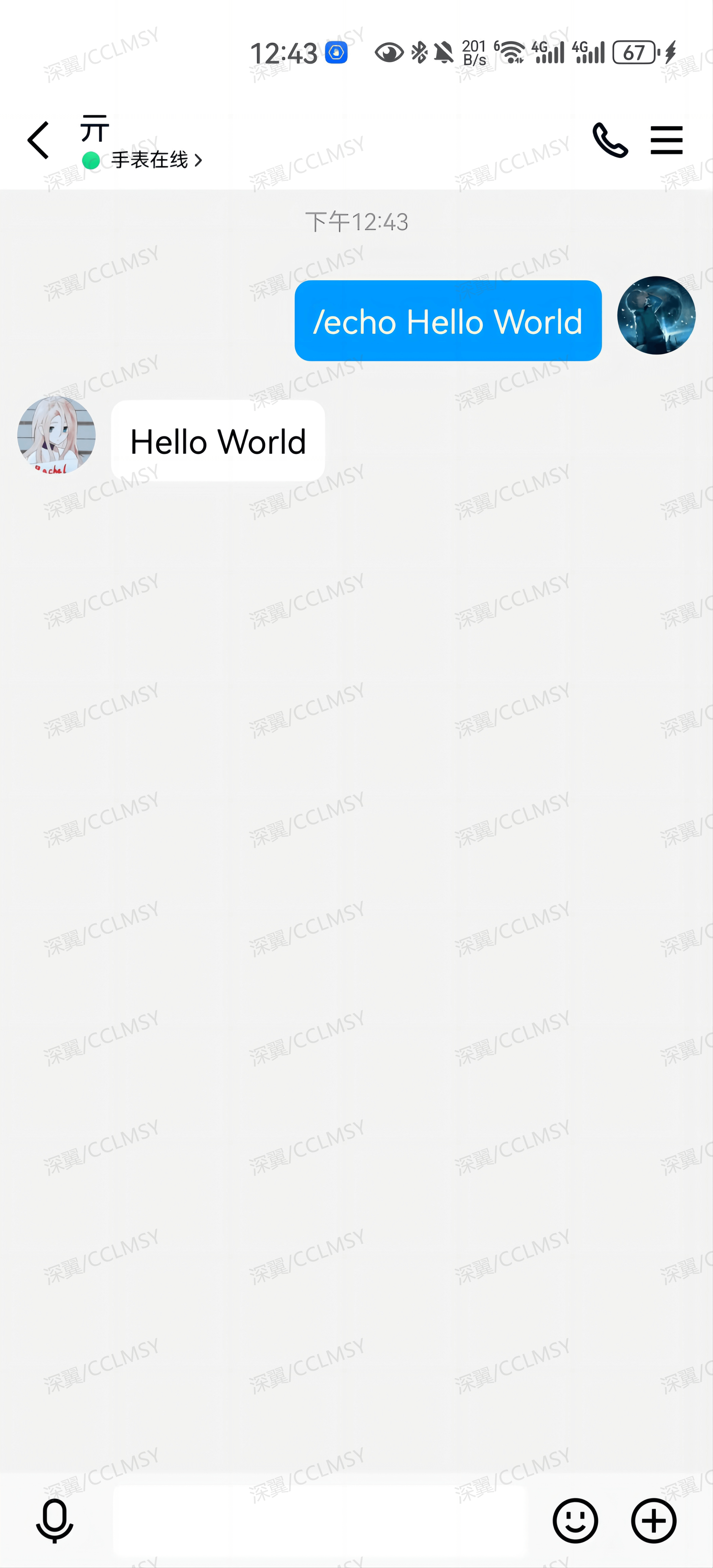
6.2.检查QQ机器人是否正常运行
登录你自己的QQ账号,添加机器人为QQ好友,然后按以下格式发送给机器人消息:
\echo [自定义消息]
请注意,不论你有没有配置命令起始字符,在这里echo的开头必须包含""字符。
如果机器人回复了和自定义消息相同的内容,那么恭喜你,你已经成功地完成了QQ机器人的部署。
示例:
7.为你的QQ机器人赋能
完成了QQ机器人部署后,你就可以为你的机器人添加插件以实现各种各样的功能。插件的管理方式见5.1节。
你可以在官方插件商店找到你需要的插件,根据插件开发者提供的的文档进行安装与配置:插件商店。
如果你有足够的能力和精力,可以学习NoneBot文档,编写开发自己的插件:NoneBot文档。
8.注意事项
- 机器人的运行进程由终端调起,在你运行机器人的过程中,请务必保证你原来的终端窗口一直保持开启状态。如果你使用的是VSCode之类的IDE,请不要关闭你终端所在的窗口。
- 机器人以你的计算机作为服务器端,BOT使用期间请务必保证你的服务器/计算机处于开机联网状态。
- Windows系统时常会进行自动更新,必要时可以关闭自动更新。