WorkFlow源码剖析——Communicator之TCPServer(中)
前言
上节博客已经详细介绍了workflow的poller的实现,这节我们来看看Communicator是如何利用poller的,对连接对象生命周期的管理。(PS:与其说Communicator利用的是poller,其实Communicator使用的是mpoller,上节在介绍poller时也提到过mpoller,现场帮读者回忆一下:mpoller是poller的manager类,管理多个poller事件池,对外提供的接口负责将各种poller_node负载均衡的分散给不同的poller。)
上节在介绍poller时,出现了各种回调,比如poller->callback()、node->data.accept()、node->data.partial_written()、node->data.create_message()等,当时我们总是一笔带过,没有去深入分析这些回调会做什么?并且每次在IO事件结束都会回调poller->callback()为什么要这样做?在poller当中,只看到了针对poller_node的malloc函数,而没有看到对应的free函数,哪里调用了free函数去释放poller_node?
别着急,本节的源码分析会逐步揭晓这些疑问。
同样的,注意里还是放在TCPServer上,对于SSL和UDP相关的内容直接忽略。先把TCP给模清楚。
管理连接对象的实现
连接上下文数据结构的分析
既然谈到对连接对象的管理,那Communicator必然有一个数据结构来表示一个连接上下文对象,它就是CommConnEntry,代码如下:
struct CommConnEntry
{struct list_head list; // 链表节点,CommConnection *conn; // 下一章介绍TCPServer的时候会用到,本文可忽略。long long seq; // seq的作用其实可以理解为:一条连接 请求-回复 的轮次。一条连接的服务端和客户端理论上讲seq值是同时递增的,并且一定是保持相同的。int sockfd; // 连接的句柄
#define CONN_STATE_CONNECTING 0
#define CONN_STATE_CONNECTED 1
#define CONN_STATE_RECEIVING 2
#define CONN_STATE_SUCCESS 3
#define CONN_STATE_IDLE 4
#define CONN_STATE_KEEPALIVE 5
#define CONN_STATE_CLOSING 6
#define CONN_STATE_ERROR 7int state; // 连接状态int error;int ref; // 对对象的引用计数struct iovec *write_iov; // 异步写缓存CommSession *session; // 含义同go-task,每次读写完毕或则出错了都会调用该对象的hanle函数CommTarget *target; // 连接目的地。对于客户端,该成员是服务器的地址;对于服务端,该成员是客户端的地址。CommService *service; // 该成员仅服务端有意义mpoller_t *mpoller;/* Connection entry's mutex is for client session only. */pthread_mutex_t mutex;
};
workflow将客户端、服务端、tcp、udp、ssl的实现都混杂在一个文件当中。在第一次阅读它的源码时有点双眼摸瞎的感觉。如果你有足够丰富的网络编程的经验可能还好。
需要注意一点的是:该连接上下文在客户端和服务端所使用成员可能是不同的,客户端不会使用service成员,服务端不会使用seq成员。
对于CommConnEntry::list成员,其实有两种用途:
-
一是被挂在服务端的CommService::alive_list上。可以理解为服务端的http保活池。
-
二是被挂在客户端的CommTarget::idle_list上。可以理解为客户端的(对同一个ipaddr:port的)http连接池。
广义上讲,服务端的CommServiceTarget::idle_list也是http连接池。只是服务端的idle_list上只可能会有一个连接。
然后可以预见的是:
-
随着tcp连接状态的变化,state成员所记录的状态也会随之更新。
-
当ref成员减为零,CommConnEntry对象将会被free掉。
根据以往的经验能大胆猜测到的就是这些信息。
状态迁移池
状态迁移池——没错,类似于事件池,状态迁移池也有一个循环,它的任务是不断根据IO的结果,转换连接上下文的状态,并且根据IO的结果去回调必要的处理函数,最为代表的是:session->handle,session的概念在go-task源码剖析一节中也是存在。它存在的意义在下一章讲解workflow对TCPServer的时候才适合透露。我们重点集中在communicator如何管理连接上下文的状态的。
这里其实就引入了一个问题,连接上下文为什么存在状态的迁移?别急,让我一步步道来。
======================================================
首先是状态池的启动————Communicator::init
代码如下:
int Communicator::init(size_t poller_threads, size_t handler_threads) {/* ... */if (this->create_poller(poller_threads) >= 0){if (this->create_handler_threads(handler_threads) >= 0){this->stop_flag = 0;return 0;}mpoller_stop(this->mpoller);mpoller_destroy(this->mpoller);msgqueue_destroy(this->msgqueue);}return -1;
}
涉及的代码过多,这里仅挑重点。
-
Communicator::init首先会启动mpoller,也就是上章我们所讲的事件池。上节的poller->callback函数以及它的参数poller->context,在poller初始化时就是由struct poller_params提供。而该结构体的够着在Communicator::create_poller当中是这样被赋值的:
void Communicator::callback(struct poller_result *res, void *context) {msgqueue_t *msgqueue = (msgqueue_t *)context;msgqueue_put(res, msgqueue); }int Communicator::create_poller(size_t poller_threads) {struct poller_params params = {.max_open_files = (size_t)sysconf(_SC_OPEN_MAX),.callback = Communicator::callback,};this->msgqueue = msgqueue_create(16 * 1024, sizeof (struct poller_result));if (this->msgqueue) {params.context = this->msgqueue;/* ... */}return -1; }所以,可以看到,上章的poller->callback回调,会将传进来的poller_result追加到Communicator的状态迁移池的队列当中。
-
Communicator::init然后会启动状态迁移池。状态迁移池使用的就是workflow自己造了链式线程池轮子。特别的是,在线程池的每个线程都运行一个routine:Communicator::handler_thread_routine,该函数是一个死循环。在每个线程都分配到一个Communicator::handler_thread_routine后,线程池的队列其实就失去了它的意义。每个Communicator::handler_thread_routine会使用1当中分配的队列。
转到Communicator::handler_thread_routine,它的实现如下:
void Communicator::handler_thread_routine(void *context) {Communicator *comm = (Communicator *)context;struct poller_result *res;while (1) {res = (struct poller_result *)msgqueue_get(comm->msgqueue);if (!res)break;switch (res->data.operation) {case PD_OP_TIMER:comm->handle_sleep_result(res);break;case PD_OP_READ:comm->handle_read_result(res);break;case PD_OP_WRITE:comm->handle_write_result(res);break;case PD_OP_LISTEN:comm->handle_listen_result(res);break;/* ... */}free(res);}if (!comm->thrdpool) {mpoller_destroy(comm->mpoller);msgqueue_destroy(comm->msgqueue);}
}
阅读过上面的代码后,我们应该惊喜,因为我们看到了free!这里我可以自信的回答这个问题:上节poller当中,只看到了针对poller_node的malloc函数,而没有看到对应的free函数,哪里调用了free函数去释放poller_node?
没错,poller_node就是在这里释放的。
poller_node生命周期是这样的链路:
__poller_new_node { malloc } -> write(addr) -> pipe -> __poller_handle_pipe { addr = read() } -> poller->callback(addr) -> handler_thread_routine { free }
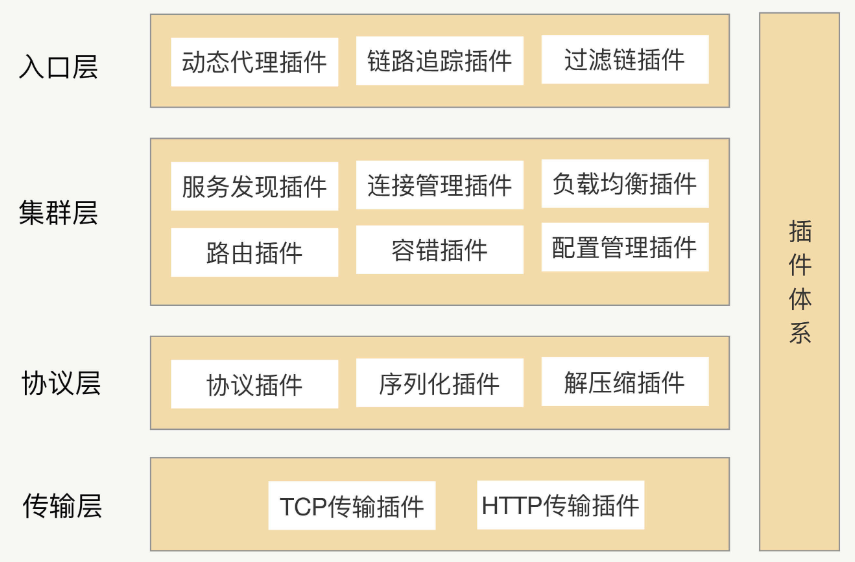
最终在状态迁移池启动完毕后,结合poller的事件池,Communicator最终的系统架构如下图:

IO结果的处理
还是贴出上章所讲解的基本tcp服务框架示例:
+-----------+| socket |+-----------+|V+-----------+| bind | 这三步就是由本节的Communicator执行+-----------+|V+-----------+| listen |+-----------+| ______________________________________________V+-----------+| accept | 从这里开始涉及到的所有函数是poller负责。+-----------+| | | |V V V Vfd fd fd .../\read write
当然Communicator会使用mpoller暴露的api对sockfd设置所关心的IO事件。间接调用了IO系统调用接口。下面从listen fd入手,逐步揭开communicator的真面目。
======================================================
创建绑定监听三部曲————Communicator::bind
函数如下:
int Communicator::bind(CommService *service) {struct poller_data data;int errno_bak = errno;int sockfd;sockfd = this->nonblock_listen(service);if (sockfd >= 0) {data.fd = sockfd;data.context = service;/* ... */data.operation = PD_OP_LISTEN;data.accept = Communicator::accept;// 开始接收客户端连接if (mpoller_add(&data, service->listen_timeout, this->mpoller) >= 0) {errno = errno_bak;return 0;}close(sockfd);}return -1;
}
注意到,listen套接字被分配了一个Communicator::accept回调,上一章介绍poller时每当listen套接字接收到一个客户端的连接,都会将IO socket作为参数回调一下accept函数,此处代表Communicator::accept,它实际上会为IO socket创建一个CommServiceTarget对象。
三部曲核心在nonblock_listen,如下:
int Communicator::nonblock_listen(CommService *service) {int sockfd = service->create_listen_fd(); // scoket()int ret;if (sockfd >= 0) {if (__set_fd_nonblock(sockfd) >= 0) { // 设置为非阻塞if (__bind_sockaddr(sockfd, service->bind_addr,service->addrlen) >= 0) { // 监听socket和addr绑定ret = listen(sockfd, SOMAXCONN); // 开始监听if (ret >= 0 || errno == EOPNOTSUPP) {service->reliable = (ret >= 0);return sockfd;}}}close(sockfd);}return -1;
}
所以Communicator::bind绑定并启动一个tcpserver的流程是:
-
初始化一个监听套接字。
-
将监听套接字添加到mpoller事件池当中。开始接受来自客户端的连接。
======================================================
接收客户端连接————Communicator::handle_listen_result
了解了前面状态迁移池和bind的流程,结合上一章poller的源码分析,一旦poller的accept接收到一条连接会回调一下Communicator::accept,然后再调用poller->callback,并将IOsocket填到res,然后res被传回Communicator队列当中。状态迁移线程会从队列当中取res,然后根据res->data.operation,会去回调Communicator::handle_listen_result,它的实现如下:
void Communicator::handle_listen_result(struct poller_result *res) {CommService *service = (CommService *)res->data.context;struct CommConnEntry *entry;CommServiceTarget *target;int timeout;switch (res->state) {case PR_ST_SUCCESS:target = (CommServiceTarget *)res->data.result; // Communicator::accept的返回值entry = Communicator::accept_conn(target, service);if (entry) {entry->mpoller = this->mpoller;res->data.operation = PD_OP_READ;res->data.fd = entry->sockfd;res->data.create_message = Communicator::create_request;res->data.context = entry;res->data.message = NULL;timeout = target->response_timeout;if (mpoller_add(&res->data, timeout, this->mpoller) >= 0) {if (this->stop_flag)mpoller_del(res->data.fd, this->mpoller);break;}__release_conn(entry);}elseclose(target->sockfd);target->decref();break;}
}
Communicator::accept_conn函数根据res创建出IOsocket的连接上下文CommConnEntry,并且该连接上下文初始的state为CONN_STATE_CONNECTED。然后将该对象加入到mpoller事件池当中开启对IOsocket的读事件进行监听。
======================================================
边接收边解析————Communicator::create_request + Communicator::append_message
客户端请求报文解析完毕,状态转移————Communicator::handle_read_result
因为这两部分涉及的代码过于庞大,详细讲解的话避免不了要贴大量的代码,作者表达水平有限。还是觉得使用图解的方式去呈现比较省事。所以,为避免文章代码比例过高,下一小节将会以图画的形式向读者剖析这部分的源码。
状态迁移总结
服务端监听套接字的绑定就不说了,下面使用一张图来讲解:从服务端接收客户端连接 到 读客户端请求报文(边读边解析),最后向客户端发送回复的一个流程。
======================================================
接收客户端连接并读取解析客户端发来的报文流程————异步状态机之美

第一步,是poller当中的__poller_handle_listen回调函数:
-
服务端在接收到一个客户端连接后首先会为其创建一个CommServiceTarget对象。
-
然后将IO socketfd通过回调poller->callback(放到队列当中)传回给Communicator。
第二步,是Communicator的Communicator::handle_listen_result函数:
-
状态变迁池拿到res对像后,得知operation为PD_OP_LISTEN的res,所以调用Communicator::handle_listen_result函数来处理res。
-
在Communicator::handle_listen_result函数当中,首先会构造一个连接上下文entry,它的状态被初始化为CONN_STATE_CONNECTED。
-
构造一个operation为READ的poller_node。并且data成员的create_message回调填为Communicator::create_request。
-
将poller_node加入到mpoller,开始对其度事件进行监听。
第三步,是poller当中的读事件处理回调__poller_handle_read:
-
读数据。
-
__poller_append_message,它里面会创建一个poller_message_t对象(如果不存在的话,一般在一轮请求的最开始会构造一个msg对象)。利用poller_message_t对象对读到的数据进行解析。这是一个边读边解析的过程,中间可能会调用数次。当msg->append返回值大于0时,说明请求报文读并且解析完了。此时将msg封装在res当中,并回调poller->callback。create_message和append两个回调分别对应Communicator::create_request和Communicator::append_message。这两个函数核心代码已经在上图③号虚框当中显示,读者可以仔细阅读一下。这里其实涉及到连接上下文entry的两次状态变换。在create_message时,entry->state会变更为CONN_STATE_RECEIVING,而在数据解析完毕,Communicator::append_message当中的in->append返回大于0进入到下面的if分支又会将entry->state变更为CONN_STATE_SUCCESS。
第四步,也是读流程的最后一步,Communicator::handle_read_result当中的Communicator::handle_incoming_request函数:
-
状态变迁池拿到res对像后,得知operation为PD_OP_READ的res,所以调用Communicator::handle_read_result函数来处理res。因为是服务端所以Communicator::handle_read_result函数会调用Communicator::handle_incoming_request函数。
-
这里会将session的state设置成CS_STATE_TOREPLY。
-
如果entry->state == CONN_STATE_SUCCESS,则将entry挂到target的idle链表上、entry->ref++,同时entry->state修改成CONN_STATE_IDLE。session->passive 必须赋值为 2。
-
回调session->handle,然后entry->ref–,当entry->ref为0时,调用__release_conn将连接关闭,并free掉entry连接上下文。
所以entry状态变化顺序为:
[CONN_STATE_CONNECTED] -> [CONN_STATE_RECEIVING] -> [CONN_STATE_SUCCESS] -> [CONN_STATE_IDLE]
======================================================
向客户端发送回复报文————先尽力而为的写,然后再异步写。
当服务端需要发送一个回复报文时会调用Communicator::reply接口,它的代码如下:
int Communicator::reply(CommSession *session) {struct CommConnEntry *entry;CommServiceTarget *target;int errno_bak;int ret;if (session->passive != 2) { // 处在读完毕的状态errno = EINVAL;return -1;}errno_bak = errno;session->passive = 3; // 写状态target = (CommServiceTarget *)session->target;ret = this->reply_reliable(session, target);if (ret == 0) { // 这里是同步写已经将所有数据发完了。无需异步写entry = session->in->entry;session->handle(CS_STATE_SUCCESS, 0); // 再次回调session的handleif (__sync_sub_and_fetch(&entry->ref, 1) == 0) {__release_conn(entry);target->decref();}} else if (ret < 0)return -1;errno = errno_bak;return 0;
}int Communicator::reply_reliable(CommSession *session, CommTarget *target) {struct CommConnEntry *entry;struct list_head *pos;int ret = -1;pthread_mutex_lock(&target->mutex);if (!list_empty(&target->idle_list)) { // 处于CONN_STATE_IDLE状态pos = target->idle_list.next;entry = list_entry(pos, struct CommConnEntry, list);list_del(pos);session->out = session->message_out();if (session->out)ret = this->send_message(entry);} elseerrno = ENOENT;pthread_mutex_unlock(&target->mutex);return ret;
}int Communicator::send_message(struct CommConnEntry *entry) {/* ... */end = vectors + cnt;cnt = this->send_message_sync(vectors, cnt, entry); // 先尽力而为的同步写if (cnt <= 0)return cnt;return this->send_message_async(end - cnt, cnt, entry); // 写缓存满了,需要异步写
}
写的设计思路和Muduo的很像muduo源码阅读笔记(10、TcpConnection)。这里不过多赘述,只讲一下差别。还是以全面的情况为例子,假设现在需要发送一批(回复)数据,并且同步写无法将所有的数据发送完。那么在同步写一部分我们的数据之后,肯定会触发异步写。
而异步写呢,就得靠poller层的__poller_handle_write函数。只要tcp的发送缓存区非满,poller_node就会收到通知,然后尽力向发送缓存区写一些数据,这可能也需要花几轮的功夫去写数据。在这期间,每写一部分数据__poller_handle_write函数就会回调node->data.partial_written,从Communicator::send_message_async函数在构造WRITE类型的poller_node时我们可以得知partial_written就是Communicator::partial_written,而它的实现如下:
int Communicator::partial_written(size_t n, void *context) {struct CommConnEntry *entry = (struct CommConnEntry *)context;CommSession *session = entry->session;int timeout;timeout = Communicator::next_timeout(session);mpoller_set_timeout(entry->sockfd, timeout, entry->mpoller);return 0;
}
在写完部分数据后,为什么需要回调一下partial_written呢?这里其实就得到了合理的解释,既然在规定的写超时时间内,我能向发送缓存写一些数据,那就说明网没断,只是网络状况可能不好。所以,按理来说,在规定的时间内发送了部分数据就应该更新一下发送的超时时间,避免没有必要的超时。
一旦异步写完成了,和__poller_handle_read不同,__poller_handle_write会自动将poller_node从epoll上移除,然后回调poller->callback。(PS,如果你忘了poller的实现,建议回顾一下WorkFlow源码剖析——Communicator之TCPServer(上))
然后同读完成类似,在Communicator当中写完成会被Communicator::handle_write_result处理,因为是服务断,所以会调用Communicator::handle_reply_result。该函数逻辑如下:
void Communicator::handle_reply_result(struct poller_result *res) {struct CommConnEntry *entry = (struct CommConnEntry *)res->data.context;CommService *service = entry->service;CommSession *session = entry->session;CommTarget *target = entry->target;int timeout;int state;switch (res->state) {case PR_ST_FINISHED:timeout = session->keep_alive_timeout();if (timeout != 0) {__sync_add_and_fetch(&entry->ref, 1); // 避免被释放res->data.operation = PD_OP_READ;res->data.create_message = Communicator::create_request;res->data.message = NULL;pthread_mutex_lock(&target->mutex);if (mpoller_add(&res->data, timeout, this->mpoller) >= 0) { // 以读的方式添加到mpoller当中pthread_mutex_lock(&service->mutex);if (!this->stop_flag && service->listen_fd >= 0) {entry->state = CONN_STATE_KEEPALIVE; // entry->state修改成CONN_STATE_KEEPALIVElist_add_tail(&entry->list, &service->alive_list); // 追加到保活链表} else {mpoller_del(res->data.fd, this->mpoller);entry->state = CONN_STATE_CLOSING;}pthread_mutex_unlock(&service->mutex);}else // 出错,该释放了__sync_sub_and_fetch(&entry->ref, 1); pthread_mutex_unlock(&target->mutex);}if (1)state = CS_STATE_SUCCESS;session->handle(state, res->error); // 第二次回调session->handleif (__sync_sub_and_fetch(&entry->ref, 1) == 0) {__release_conn(entry);((CommServiceTarget *)target)->decref();}break;}
}
逻辑分成三部分:
-
将entry->ref自增一 && 以读的方式将poller_node加回到mpoller当中继续监听客户端的读请求 && 将entry->state修改成CONN_STATE_KEEPALIVE并且加到CommService的保活链表当中。
-
将session的state设置成CS_STATE_SUCCESS,再回调session->handle。
-
entry->ref自减一,为零就释放连接以及上下文。
所以在经过Communicator::handle_reply_result函数后,entry->state状态被修改为CONN_STATE_KEEPALIVE。然后再处理下一轮客户端请求。
最后备忘一下:
-
对于session->passive的变化,在(create_request)创建msg(请求报文解析器)session->passive被置为1,在读取并解析完毕请求报文后,Communicator::handle_incoming_request函数回将session->passive置为2,在调用Communicator::reply向网络发送回复时session->passive会被置为3。
-
Communicator::send_message_async当中在吧poller_node以WRITE方式加入到mpoller时会走到mpoller_mod分支。
到了这里其实就能回答这个问题:连接上下文为什么存在状态的迁移?
首先一条tcp连接在服务端必定纯在两种状态:接收、发送。而因为追求性能,我们不得不采用异步的方式将socketfd设置成非阻塞的。并且网络传输(不管是否阻塞)会引来一些问题:读不可能一次性读完、写不可能一次性写完,所以读的过程当中和写的过程当中都存在一种中间的状态。所以状态迁移是必然的。
最后,在了解了workflow的底层架构之后,其实就能感觉到异步编程就是在实现一个状体机的过程。
本章完结
















![[241102] Fedora Linux 41 正式发布 | Wasmer 5.0 发布](https://i-blog.csdnimg.cn/direct/ff98d1d4cd2946b492965ceb187f9f17.png#pic_center)