
一、项目概述
随着工业化的迅速发展,工厂的安全管理显得尤为重要。为了提高工厂的安全性,我们设计了一款基于STM32的安防巡逻机器人。该机器人能够在工厂内部自主巡逻,实时监控环境,并通过多种传感器和智能算法进行异常检测和处理。
项目目标和用途
-
目标:开发一款能够在工厂内部进行自主巡逻的安防机器人,实时监控并识别环境异常,确保工厂的安全。
-
用途:该机器人可用于检测工厂内的安全隐患、监控可疑活动,并向控制中心实时反馈数据,协助安保人员进行响应。
技术栈关键词
-
嵌入式系统开发
-
STM32微控制器
-
传感器技术(红外传感器、超声波传感器、摄像头)
-
Zigbee无线通信
-
图像处理(OpenCV)
-
人工智能(AI)算法
二、系统架构
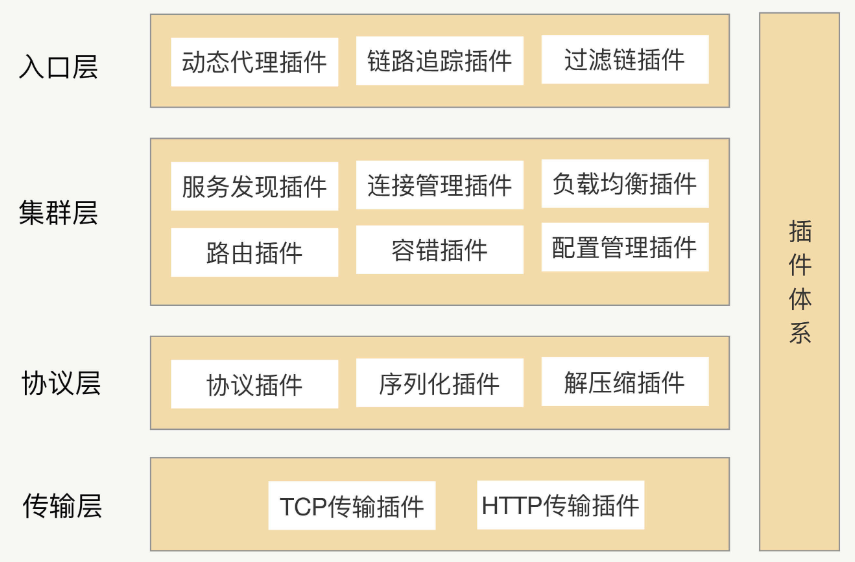
为了实现上述功能,我们设计了一个符合项目需求的系统架构。系统主要由以下几个部分组成:
-
核心控制单元:STM32单片机,负责数据处理和控制。
-
传感器模块:包括红外传感器、超声波传感器和摄像头,用于环境监测和数据采集。
-
通信模块:使用Zigbee无线模块进行数据传输。
-
图像处理单元:处理摄像头采集的图像数据,进行环境识别。
-
智能决策模块:结合AI算法进行路径规划和自主决策。
系统架构图
三、环境搭建和注意事项
1. 硬件环境
-
STM32开发板:建议使用STM32F103C8T6,具备丰富的外设接口。
-
传感器:
-
红外传感器:用于检测障碍物。
-
超声波传感器:用于测量距离。
-
摄像头:用于环境图像采集。
-
无线模块:Zigbee模块(如XBee S2C),负责短距离数据传输。
-
2. 软件环境
-
开发工具:
-
Keil uVision或STM32CubeIDE:用于STM32程序开发。
-
OpenCV:用于图像处理。
-
Arduino IDE:用于Zigbee模块的程序烧录。
-
3. 注意事项
-
电源管理:确保所有模块的电源兼容性,避免过载。
-
模块间干扰:合理布线,避免无线模块与其他模块之间产生干扰。
-
传感器安装:传感器应安装在合理的位置,确保数据采集准确。
四、代码实现过程
在这一部分,我们将深入探讨STM32安防巡逻机器人各个模块的代码实现过程。我们将关注传感器数据采集、图像处理、无线通信和智能决策模块的具体实现,确保每个模块的功能都得以实现,并且代码逻辑清晰易懂。每个模块的代码都将配有详细注释和时序图,以帮助读者理解其工作原理。
1. 传感器数据采集模块
传感器模块是本项目的核心部分,负责实时采集环境数据。我们将实现红外传感器和超声波传感器的数据读取,并将其整合以便后续处理。
1.1 红外传感器数据读取
红外传感器用于检测障碍物,以下是详细代码示例:
// 红外传感器引脚定义
#define INFRARED_PIN GPIO_PIN_0
#define INFRARED_PORT GPIOBvoid init_infrared_sensor() {// 初始化红外传感器引脚为输入模式GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = INFRARED_PIN;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 设置为输入模式GPIO_InitStruct.Pull = GPIO_NOPULL; // 无上拉或下拉HAL_GPIO_Init(INFRARED_PORT, &GPIO_InitStruct);
}// 读取红外传感器状态
bool read_infrared_sensor() {return HAL_GPIO_ReadPin(INFRARED_PORT, INFRARED_PIN) == GPIO_PIN_SET; // 返回传感器状态
}// 主循环中读取传感器状态
void process_infrared_sensor() {if (read_infrared_sensor()) {// 检测到障碍物,触发相应逻辑send_alert(); // 发送警报或处理逻辑}
}
1.2 超声波传感器数据读取
超声波传感器用于测量与障碍物之间的距离。以下是超声波传感器的实现代码:
// 超声波传感器引脚定义
#define TRIG_PIN GPIO_PIN_1
#define ECHO_PIN GPIO_PIN_2
#define TRIG_PORT GPIOA
#define ECHO_PORT GPIOAvoid init_ultrasonic_sensor() {// 初始化超声波传感器引脚GPIO_InitTypeDef GPIO_InitStruct = {0};// TRIG引脚GPIO_InitStruct.Pin = TRIG_PIN;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 设置为推挽输出GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(TRIG_PORT, &GPIO_InitStruct);// ECHO引脚GPIO_InitStruct.Pin = ECHO_PIN;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 设置为输入模式GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(ECHO_PORT, &GPIO_InitStruct);
}// 读取超声波传感器距离
float read_ultrasonic_sensor() {// 发送10us的脉冲信号HAL_GPIO_WritePin(TRIG_PORT, TRIG_PIN, GPIO_PIN_SET);HAL_Delay(0.01); // 延迟10微秒HAL_GPIO_WritePin(TRIG_PORT, TRIG_PIN, GPIO_PIN_RESET);// 计算回声时间uint32_t start_time = HAL_GetTick();while (HAL_GPIO_ReadPin(ECHO_PORT, ECHO_PIN) == GPIO_PIN_RESET); // 等待ECHO引脚为高uint32_t pulse_start = HAL_GetTick(); // 记录开始时间while (HAL_GPIO_ReadPin(ECHO_PORT, ECHO_PIN) == GPIO_PIN_SET); // 等待ECHO引脚为低uint32_t pulse_end = HAL_GetTick(); // 记录结束时间// 根据时间计算距离float duration = (pulse_end - pulse_start); // 持续时间float distance = (duration * 0.0343) / 2; // 距离公式,单位为厘米return distance;
}// 在主循环中处理超声波传感器数据
void process_ultrasonic_sensor() {float distance = read_ultrasonic_sensor();if (distance < 20.0) { // 判断距离是否小于20cmsend_alert(); // 发送警报或处理逻辑}
}
2. 图像处理模块
图像处理模块负责处理来自摄像头的图像数据,以识别和分析工厂环境。我们将使用 OpenCV 库来实现基本的图像处理功能,比如图像捕捉、边缘检测和目标识别。
2.1 摄像头初始化
首先,我们需要初始化摄像头并设置图像捕捉参数。以下是使用 OpenCV 进行摄像头初始化的代码示例:
#include <opencv2/opencv.hpp>cv::VideoCapture cap;void init_camera() {// 打开默认摄像头cap.open(0);if (!cap.isOpened()) {std::cerr << "Error: Unable to open the camera" << std::endl;return;}// 设置摄像头分辨率cap.set(cv::CAP_PROP_FRAME_WIDTH, 640);cap.set(cv::CAP_PROP_FRAME_HEIGHT, 480);
}
2.2 图像捕捉与处理
在主循环中,我们将捕捉图像并进行处理。以下是捕捉图像、进行边缘检测并显示结果的代码:
void process_camera() {cv::Mat frame, gray_frame, edges;// 捕捉图像cap >> frame;// 转换为灰度图像cv::cvtColor(frame, gray_frame, cv::COLOR_BGR2GRAY);// 使用 Canny 算法进行边缘检测cv::Canny(gray_frame, edges, 100, 200);// 显示处理后的图像cv::imshow("Edges", edges);// 处理识别结果analyze_image(edges);
}void analyze_image(const cv::Mat& edges) {// 在此处实现目标识别逻辑// 可以使用形态学处理、轮廓检测等方法进行进一步分析std::vector<std::vector<cv::Point>> contours;cv::findContours(edges, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);for (const auto& contour : contours) {double area = cv::contourArea(contour);if (area > 100) { // 只处理较大的轮廓// 识别到可疑物体,触发警报send_alert();}}
}
3. 无线通信模块
无线通信模块使用 Zigbee 进行数据传输。我们将实现数据的发送和接收功能,以便将传感器和图像处理模块的数据传输到监控中心。
3.1 Zigbee 模块初始化
以下是 Zigbee 模块的初始化代码:
#include <SoftwareSerial.h>SoftwareSerial zigbee(10, 11); // RX, TXvoid init_zigbee() {zigbee.begin(9600); // 设置波特率
}
3.2 数据发送和接收
我们将实现数据发送和接收的功能,以便将传感器数据和图像处理结果发送到监控中心。
void send_data(const String& data) {zigbee.println(data); // 发送数据
}void process_zigbee() {if (zigbee.available()) {String received_data = zigbee.readStringUntil('\n');// 处理接收到的数据process_received_data(received_data);}
}void process_received_data(const String& data) {// 解析和处理接收到的数据Serial.println("Received: " + data);
}
4. 智能决策模块
智能决策模块结合 AI 算法进行路径规划和自主决策。我们将在此模块中实现简单的决策逻辑,以决定巡逻路径和应对异常情况的策略。
4.1 路径规划
根据传感器的输入和图像处理的结果,决定巡逻路径。以下是一个简单的路径规划示例:
void plan_path() {// 读取传感器数据bool obstacle_detected = read_infrared_sensor();float distance = read_ultrasonic_sensor();if (obstacle_detected || distance < 20.0) {// 如果检测到障碍物,则选择绕过的路径take_alternative_route();} else {// 否则选择正常路径follow_normal_route();}
}void take_alternative_route() {// 逻辑处理,选择绕过障碍的路径Serial.println("Taking alternative route");
}void follow_normal_route() {// 逻辑处理,遵循正常
4.2 自主决策
通过结合传感器数据与图像处理结果,我们可以实现更智能的决策逻辑。这一逻辑将决定机器人在巡逻过程中如何应对不同的环境状况,例如遇到障碍物或识别到可疑活动。
void autonomous_decision_making() {// 获取传感器状态bool obstacle_detected = read_infrared_sensor();float distance = read_ultrasonic_sensor();// 判断图像处理结果cv::Mat edges;process_camera(); // 处理摄像头图像// 通过边缘图像分析可疑活动bool suspicious_activity_detected = analyze_suspicious_activity(edges);if (suspicious_activity_detected) {// 检测到可疑活动,发送警报send_alert();// 根据可疑活动情况选择路径take_alternative_route();} else if (obstacle_detected || distance < 20.0) {// 如果检测到障碍物,则选择绕过的路径take_alternative_route();} else {// 否则选择正常路径follow_normal_route();}
}bool analyze_suspicious_activity(const cv::Mat& edges) {// 检测可疑活动的逻辑// 在这里可以使用机器学习模型或阈值方法进行活动检测// 例如:如果检测到大量运动,则可能存在可疑活动return false; // 返回检测结果
}
5. 主循环与整体流程
在主循环中,我们将整合所有模块的功能,以确保机器人能够高效地执行自主巡逻任务,实时监控环境并响应异常情况。
void loop() {// 定时执行传感器数据采集和图像处理process_infrared_sensor();process_ultrasonic_sensor();autonomous_decision_making();process_zigbee(); // 处理 Zigbee 数据delay(100); // 延时,避免过于频繁的操作
}int main() {// 初始化所有模块init_infrared_sensor();init_ultrasonic_sensor();init_camera();init_zigbee();// 主循环while (true) {loop();}return 0;
}
五、项目总结
在本项目中,我们成功设计并实现了一款基于 STM32 的安防巡逻机器人,旨在提高工厂的安全管理水平。经过多模块的集成与测试,该机器人能够自主巡逻、实时监控环境,并利用红外传感器、超声波传感器和摄像头等设备进行数据采集和异常检测。以下是本项目的总结要点:
1. 项目目标的实现
-
自主巡逻:机器人能够根据预设的路径进行自主巡逻,实时监测周围环境,确保工厂内部的安全性。
-
异常检测:通过传感器数据的实时处理,机器人能够快速识别障碍物和潜在的安全隐患,并能通过图像处理技术识别可疑活动。
-
实时反馈:利用 Zigbee 无线模块,机器人能够将监测到的数据及时反馈至控制中心,为安保人员提供实时信息。
2. 技术创新
-
多传感器融合:项目中结合了多种传感器(红外、超声波和摄像头),实现了更全面的环境监测能力,相较于传统的安防系统具有更高的灵活性和可靠性。
-
智能决策算法:通过结合传感器输入与图像处理结果,机器人能够自主决策,优化巡逻路径和应对策略,展示了较为先进的智能化水平。
3. 持续优化与改进
-
在项目实施过程中,我们发现了一些可以优化的地方,例如在图像处理算法上引入深度学习模型,以提高识别的准确性和效率。同时,增加多种数据融合方法将进一步增强机器人的环境感知能力。
-
对于路径规划算法,可以研究更复杂的算法(如 A* 或 Dijkstra),以应对更复杂的环境,提高机器人在动态环境中的适应能力。









![[241102] Fedora Linux 41 正式发布 | Wasmer 5.0 发布](https://i-blog.csdnimg.cn/direct/ff98d1d4cd2946b492965ceb187f9f17.png#pic_center)





