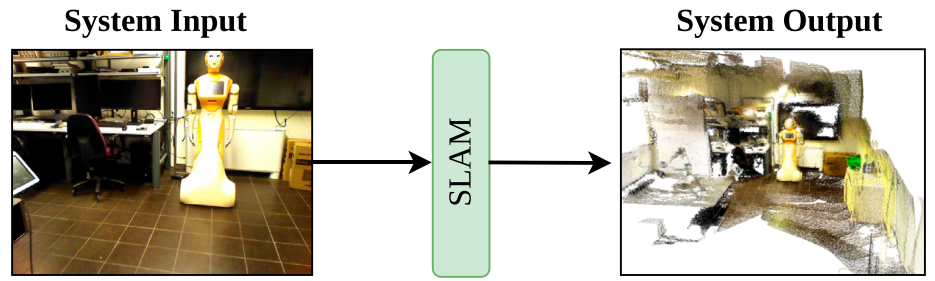
当前位置: 首页 > news >正文 1.7 点云数据获取方式——视觉SLAM news 2025/4/30 9:21:00 图1-7-1 Visual SLAM生成的点 查看全文 http://www.xdnf.cn/news/218737.html 相关文章: 2025年- H12-Lc119-56.合并区间(普通数组)---java版 【AI论文】Skywork R1V2:用于推理的多模态混合强化学习 (计数)洛谷 P8386 PA2021 Od deski do deski/P10375 AHOI2024 计数 题解 DataTransfer API 教程 零训练成本优化LLM: 11种LLM权重合并策略原理与MergeKit实战配置 OCR技术,金融行业的“数字魔法”✨ 推荐系统在线离线打分不一致:核心原因与全链路解决方案 LeetCode 155题解 | 最小栈 应用安全系列之四十七:NoSQL注入 Spring Boot集成Spring Cloud 2024(不使用Feign) Ubuntu如何查看硬盘的使用情况,以及挂载情况。 非线性现实:绘制复杂系统的图景及AI推理 C语言按位操作符 近期实践总结 k8s术语pod PTA 天梯赛 7-11:关键活动 ← AOE网 【时时三省】(C语言基础)利用数组处理批量数据 mmap核心原理和用途及其与内存映射段的关系 5大常见环保行业OA系统,注重项目管理 全局id生成器生产方案 如何解决管家婆软件录单选择商品时不出来商品选择框 ETL数据集成与数据资产的紧密关联,解锁数据价值新密码 一起来学 Vue 3 C++ 简单线程池实现 线程数据同步的三种方式 Qwen多模态系列论文 C语言中的POSIX线程与多线程编程:从入门到实践 Java SE(5)——数组 Java基础学习内容大纲 【Qt】Qt换肤,使用QResource动态加载资源文件