一、协议
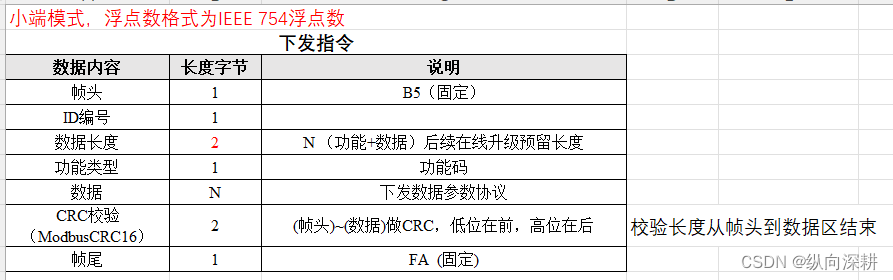
数据格式为小端模式,浮点数格式为IEEE754,需与上位机的PC端一致,如window系统,其它系统需要自行测试,用于传输16位、32位、float数据格式,避免只传输字节数据带来转换的繁琐及精度丢失。
二、下位机数据接收线程
/**
* 通讯主线程.
* .
* @param[in] parameter:线程参数.
* @param[out] 无.
* @retval 无.
* @par 标识符
* 保留
* @par 其它
* 无
* @par 修改日志
* kun于2022-07-25创建
*/
void comm_thread_entry(void *parameter)
{uint8_t ch;serial = rt_device_find("uart2");if (!serial){LOG_E("find comm uart1 failed!\n");return;}else{struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; /* 初始化配置参数 *//* step2:修改串口配置参数 */config.baud_rate = BAUD_RATE_115200; //修改波特率为 9600config.data_bits = DATA_BITS_8; //数据位 8config.stop_bits = STOP_BITS_1; //停止位 1config.bufsz = RECV_BUF_LEN; //修改缓冲区 buff size 为 128config.parity = PARITY_NONE; //无奇偶校验位/* step3:控制串口设备。通过控制接口传入命令控制字,与控制参数 */rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);}while(1){rt_thread_delay(1);// rt_device_write(serial, 0, "hello world", 11);if( rt_device_read(serial, -1, &ch, 1) > 0 ){comm_state.recv_time = 100;switch( comm_state.recv_state ){case RECV_START:if( ch == COMM_HEADER ){comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_state++;}break;case RECV_ID:if( ch == ROBOT_ID ){comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_state++;comm_state.recv_sub_len = 2;}else{comm_state.recv_state = 0;comm_state.recv_index = 0;}break;case RECV_LEN:comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_sub_len --;if( comm_state.recv_sub_len==0 ){comm_header_t *header = (comm_header_t *)comm_state.recv_buf;comm_state.recv_data_len = header->len;comm_state.recv_state++;}break;case RECV_FUN_DATA:comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_data_len --;if( comm_state.recv_data_len == 0 ){comm_state.recv_state++;comm_state.recv_sub_len = 2;}break;case RECV_CRC:comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_sub_len --;if( comm_state.recv_sub_len == 0 ){comm_state.recv_state++;}break;case RECV_END:if( ch == COMM_ENDER ){comm_state.recv_buf[comm_state.recv_index++] = ch;comm_state.recv_len = comm_state.recv_index;comm_state.recv_state = 0;comm_state.recv_index = 0;comm_state.recv_complete = 1;}else{comm_state.recv_state = 0;comm_state.recv_index = 0;}break;default:break;}}//字节流接收超时if( comm_state.recv_time > 0 ){comm_state.recv_time --;if( comm_state.recv_time==0 ){if( comm_state.recv_state != RECV_START )LOG_I("recv byte step %d timeout",comm_state.recv_state);comm_state.recv_state = RECV_START;comm_state.recv_len = 0;comm_state.recv_index = 0;}}if( comm_state.recv_complete ){comm_state.recv_complete = 0;LOG_HEX("RECV", 16, comm_state.recv_buf, comm_state.recv_len);comm_header_t *header_ptr = (comm_header_t *)comm_state.recv_buf;uint16_t *crc_ptr = (uint16_t *)&comm_state.recv_buf[comm_state.recv_len-3];if( comm_crc16( comm_state.recv_buf, comm_state.recv_len-3 ) == *crc_ptr ){switch( header_ptr->fun_code ){case HAND_SETP_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"HAND_SETP_CMD");comm_hand_set_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_POS_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_POS_CMD");comm_depot_pos_cmd(&header_ptr->data, header_ptr->len-1);break;case AVOID_HIGHT_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"AVOID_HIGHT_CMD");avoid_hight_cmd(&header_ptr->data, header_ptr->len-1);break;case MOTOR_PMT_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"MOTOR_RST_CMD");motor_pmt_cmd(&header_ptr->data, header_ptr->len-1);break;case STATION_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"STATION_CMD");station_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_OFFSET_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_OFFSET_CMD");depot_offset_cmd(&header_ptr->data, header_ptr->len-1);break;case INIT_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"INIT_CMD");comm_init_cmd(&header_ptr->data, header_ptr->len-1);break;case STATION_MOVE_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"STATION_MOVE_CMD");comm_station_move_cmd(&header_ptr->data, header_ptr->len-1);break;case STATION_CLAMP_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"STATION_CLAMP_CMD");comm_station_clamp_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_IN_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_IN_CMD");comm_depot_in_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_A_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_A_CMD");comm_depot_a_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_B_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_B_CMD");comm_depot_b_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_OCCUPY_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_OCCUPY_CMD");comm_occupy_cmd(&header_ptr->data, header_ptr->len-1);break;case CLAMP_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"CLAMP_CMD");comm_clamp_cmd(&header_ptr->data, header_ptr->len-1);break;case STATUS_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"STATUS_CMD");comm_status_cmd(&header_ptr->data, header_ptr->len-1); break;case RBT_MOVE_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"RBT_MOVE_CMD");comm_rbt_move_cmd(&header_ptr->data, header_ptr->len-1);break;case DEPOT_MOVE_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_MOVE_CMD");comm_depot_move_cmd(&header_ptr->data, header_ptr->len-1);break;case MOTOR_INIT_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"DEPOT_MOVE_CMD");comm_motor_init_cmd(&header_ptr->data, header_ptr->len-1);break;case SWITCH_CTRL_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"SWITCH_CTRL_CMD");comm_switch_ctrl_cmd(&header_ptr->data, header_ptr->len-1);break;case LIGHT_CTRL_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"LIGHT_CTRL_CMD");comm_light_ctrl_cmd(&header_ptr->data, header_ptr->len-1);break;case OTA_CMD:LOG_I("recv cmd %02X %s",header_ptr->fun_code,"OTA_CMD");comm_ota_cmd(&header_ptr->data, header_ptr->len-1);break;default:LOG_E("illegal cmd %02X",header_ptr->fun_code);break;}}else{LOG_E("recv cmd %02X crc error",header_ptr->fun_code);}}}
}
comm_state.recv_complete 接收一帧完整数据包标记,然后进行校验,判断功能码进行命令处理流转
/**
* 设置工位座标.
* .
* @param[in] data:数据指针,len:长度.
* @param[out] 无.
* @retval 无.
* @par 标识符
* 保留
* @par 其它
* 无
* @par 修改日志
* kun于2022-07-25创建
*/
static void comm_depot_pos_cmd(void *data, uint16_t len)
{#pragma pack(push)#pragma pack(1)typedef struct _depot_pos_recv_t{uint8_t mode;station_no_t no;depot_pmt_t pmt;}depot_pos_recv_t;#pragma pack(pop)#pragma pack(push)#pragma pack(1)typedef struct _depot_pos_send_t{uint8_t mode;station_no_t no;depot_pmt_t pmt[DEPOT_MAX];}depot_pos_send_t;#pragma pack(pop)depot_pos_recv_t *depot_pos_recv_ptr = (depot_pos_recv_t *)data;if( depot_pos_recv_ptr->mode==0x00 ){if( depot_pos_recv_ptr->no <= DEPOT_MAX ){config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].speed = depot_pos_recv_ptr->pmt.speed;config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].door = depot_pos_recv_ptr->pmt.door;config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].clamp = depot_pos_recv_ptr->pmt.clamp;config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].chip = depot_pos_recv_ptr->pmt.chip;config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].scaner = depot_pos_recv_ptr->pmt.scaner;config_save();comm_reply(EXE_OK, 0, DEPOT_POS_CMD, RT_NULL, 0);}}else if( depot_pos_recv_ptr->mode==0x01 ){depot_pos_send_t depot_pos_send;depot_pos_send.mode = depot_pos_recv_ptr->mode;depot_pos_send.no = 0;rt_memcpy(depot_pos_send.pmt,config_get_ptr()->depot_pmt,sizeof(((config_t*)0)->depot_pmt));comm_reply(EXE_OK, 0, DEPOT_POS_CMD, &depot_pos_send, sizeof(depot_pos_send_t));}
}
typedef struct _depot_pmt_t{float speed;float door;float clamp;float chip;float scaner;
}depot_pmt_t;
这个函数传输各个工位的座标数据到下位机进行保存,传输格式为浮点,单位是mm
定义提取结构体
typedef struct _depot_pmt_t{
float speed;
float door;
float clamp;
float chip;
float scaner;
}depot_pmt_t;
typedef struct _depot_pos_recv_t{
uint8_t mode;
station_no_t no;
depot_pmt_t pmt;
}depot_pos_recv_t;
定义结构体指针指向接收的数据帧的数据区
depot_pos_recv_t *depot_pos_recv_ptr = (depot_pos_recv_t *)data;
通过结构体的指针提取需要的数据放到存储单元中,各个数据为浮点数,没有数据转换带来精度损失及转换繁琐问题
config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].speed = depot_pos_recv_ptr->pmt.speed;
config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].door = depot_pos_recv_ptr->pmt.door;
config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].clamp = depot_pos_recv_ptr->pmt.clamp;
config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].chip = depot_pos_recv_ptr->pmt.chip;
config_get_ptr()->depot_pmt[depot_pos_recv_ptr->no-1].scaner = depot_pos_recv_ptr->pmt.scaner;
三、下位机数据上报
/**
* 通讯状态返回.
* .
* @param[in] status:状态,error_code:错误码,fun_code:功能码,data:数据指针,len:长度.
* @param[out] 无.
* @retval 无.
* @par 标识符
* 保留
* @par 其它
* 无
* @par 修改日志
* kun于2022-07-25创建
*/
void comm_reply(comm_cmd_retsult_t status, uint16_t error_code, uint8_t fun_code, void *data, uint16_t len)
{#pragma pack(push)#pragma pack(1)typedef struct {comm_cmd_retsult_t status;uint16_t error_code;}reply_t;#pragma pack(pop)uint16_t fix_data_len = sizeof(reply_t)+len;//comm_header_t包含一个数据字节所以需要减1,3为校验码+结束符uint8_t *send_ptr = rt_malloc(sizeof(comm_header_t) -1 + 3 + fix_data_len);if( send_ptr ){comm_header_t *comm_header;comm_header = (comm_header_t *)send_ptr;comm_header->header = COMM_HEADER;comm_header->id = ROBOT_ID;//1为命令码comm_header->len = fix_data_len+1;comm_header->fun_code = fun_code;reply_t *reply_ptr = (reply_t*)&comm_header->data;reply_ptr->status = status;reply_ptr->error_code = error_code;uint8_t *target_data = (uint8_t*)(&comm_header->data+sizeof(reply_t));uint8_t *source_data = (uint8_t*)data;for( uint16_t i=0; i<len; i++ ){*target_data++ = *source_data++;}uint16_t *crc_ptr = (uint16_t *)target_data;//comm_header_t包含一个数据字节所以需要减1*crc_ptr = comm_crc16( send_ptr, sizeof(comm_header_t) -1 + fix_data_len);target_data+=2;*target_data = COMM_ENDER;if( status == EXE_OK )LOG_D("reply EXE OK:%02X",fun_code);else if( status == EXE_FAIL )LOG_D("reply EXE FAIL:%02X",fun_code);else if( status == RECV_OK )LOG_D("reply RECV OK:%02X",fun_code);
// LOG_HEX("REPLY", 16, send_ptr, sizeof(comm_header_t) -1 + 3 + fix_data_len);rt_device_write(serial, 0, send_ptr, sizeof(comm_header_t) -1 + 3 + fix_data_len);rt_free(send_ptr);}else{LOG_E("can not malloc memory:%02X",fun_code);}
}
所有命令的上报为统一格式,填入状态,错误码,功能码,及命令的私有数据,调用comm_reply函数将对上报数据进行打包发7送
四、运动执行
/**
* 移动运动轴.
* .
* @param[in] data:数据指针,len:长度.
* @param[out] 无.
* @retval 无.
* @par 标识符
* 保留
* @par 其它
* 无
* @par 修改日志
* kun于2022-07-25创建
*/
static void comm_rbt_move_cmd(void *data, uint16_t len)
{#pragma pack(push)#pragma pack(1)typedef struct _move_cmd_t{uint8_t mode;uint8_t axle;float speed;float distance;}move_cmd_t;#pragma pack(pop)static const uint8_t rbt_axis[]={ROBOT_Y_AXIS,ROBOT_Z_AXIS};move_cmd_t *move_cmd_ptr = (move_cmd_t *)data;robot_msg_t msg;msg.type.move_msg.axle = rbt_axis[move_cmd_ptr->axle-1];msg.robot_cmd = ROBOT_CMD_MOVE;msg.type.move_msg.action = move_cmd_ptr->mode;msg.type.move_msg.abs_res = 0;msg.type.move_msg.position = move_cmd_ptr->distance;msg.type.move_msg.speed = move_cmd_ptr->speed;comm_reply(RECV_OK, 0, RBT_MOVE_CMD, RT_NULL, 0);robot_write_queue(&msg);
}
解释移动命令,提取运行座标及速度数据,建立一个消息,将数据放入消息中,由运动线程接收消息将进行电机的控制
五、运动控制
/**
* 机械臂动作执行线程.
* .
* @param[in] parameter:建立线程传入参数.
* @param[out] 无.
* @retval 无.
* @par 标识符
* 保留
* @par 其它
* 无
* @par 修改日志
* kun于2022-07-29创建
*/
void robot_thread_entry(void *parameter)
{robot_msg_t robot_msg;uint8_t i;float speed;float dist = 0;station_xyz_t station_target;while(1){//读取命令队列if( robot_read_queue(&robot_msg, RT_WAITING_FOREVER) == RT_EOK ){const char *rbt_cmd_str[]={ "ROBOT_CMD_MOVE","ROBOT_CMD_ROUTER","ROBOT_CMD_CLAMP","ROBOT_CMD_DEPOT","ROBOT_CMD_INIT",};LOG_D("get robot cmd %s\n",rbt_cmd_str[robot_msg.robot_cmd]);//移动调试命令if( robot_msg.robot_cmd == ROBOT_CMD_MOVE ){if( robot_msg.type.move_msg.action == ACT_MOVE ){motor_move(robot_msg.type.move_msg.axle, robot_msg.type.move_msg.position*ROBOT_AXIS_MM, robot_msg.type.move_msg.speed*ROBOT_AXIS_MM);motor_wait_stop(robot_msg.type.move_msg.axle,MOTOR_TIMEOUT);}else if( robot_msg.type.move_msg.action == ACT_STOP ){motor_stop(robot_msg.type.move_msg.axle);}//更新各个电机的距离if( robot_msg.type.move_msg.axle == ROBOT_Z_AXIS ){robot_state.axis_mm_z = (float)motor_curr_step((motor_no_t)ROBOT_Z_AXIS)/(float)ROBOT_AXIS_MM;comm_reply(EXE_OK,RBT_NO_ERR,RBT_MOVE_CMD,RT_NULL,0);}else if( robot_msg.type.move_msg.axle == ROBOT_Y_AXIS ){robot_state.axis_mm_y = (float)motor_curr_step((motor_no_t)ROBOT_Y_AXIS)/(float)ROBOT_AXIS_MM;comm_reply(EXE_OK,RBT_NO_ERR,RBT_MOVE_CMD,RT_NULL,0);}else if( robot_msg.type.move_msg.axle == ROBOT_IN_AXIS ){robot_state.axis_mm_in = (float)motor_curr_step((motor_no_t)ROBOT_IN_AXIS)/(float)ROBOT_AXIS_MM;comm_reply(EXE_OK,RBT_NO_ERR,DEPOT_MOVE_CMD,RT_NULL,0);}else if( robot_msg.type.move_msg.axle == ROBOT_A_AXIS ){robot_state.axis_mm_a = (float)motor_curr_step((motor_no_t)ROBOT_A_AXIS)/(float)ROBOT_AXIS_MM;comm_reply(EXE_OK,RBT_NO_ERR,DEPOT_MOVE_CMD,RT_NULL,0);}else if( robot_msg.type.move_msg.axle == ROBOT_B_AXIS ){robot_state.axis_mm_b = (float)motor_curr_step((motor_no_t)ROBOT_B_AXIS)/(float)ROBOT_AXIS_MM;comm_reply(EXE_OK,RBT_NO_ERR,DEPOT_MOVE_CMD,RT_NULL,0);}}//路径路由命令else if( robot_msg.robot_cmd == ROBOT_CMD_ROUTER ){//已经处于目标位置,直接返回if( robot_msg.type.router_msg.station == robot_state.curr_station ){comm_reply(EXE_OK,RBT_NO_ERR,STATION_MOVE_CMD,RT_NULL,0);}else{//如果当前已经处于制备、扩增、检测位,直接运动到各个待机位//当前位置不在待机位先运动到待机位if( robot_state.curr_station != DJ_STA ){if( robot_state.curr_station == JC_STA || robot_state.curr_station == KZ_STA ||\robot_state.curr_station == ZB_STA ){dist = robot_state.axis_mm_z + config_get_ptr()->avoid_hight;dist>ROBOT_Z_UP_MAX?dist=ROBOT_Z_UP_MAX:0;//抬升避让高度LOG_D("No1. Z-axis move to %s %d.%03d mm speed %d.%03d mm",\station_name[robot_state.curr_station], \(int)dist,\float_to_int(dist),\(int)(config_get_ptr()->station_pmt.speed.z),\float_to_int(config_get_ptr()->station_pmt.speed.z));robot_move_distance(ROBOT_Z_AXIS, dist, config_get_ptr()->station_pmt.speed.z);if( motor_wait_stop((motor_no_t)ROBOT_Z_AXIS,MOTOR_TIMEOUT) == 3){continue;}}//运行到待机位Y轴dist = config_get_ptr()->station_pmt.depot_in.y;LOG_D("No2. Y-axis move to AXES %d.%03d mm speed %d.%03d mm",\(int)dist,\float_to_int(dist),\config_get_ptr()->station_pmt.speed.y,\float_to_int(config_get_ptr()->station_pmt.speed.y));robot_move_distance(ROBOT_Y_AXIS, dist, config_get_ptr()->station_pmt.speed.y);if( motor_wait_stop((motor_no_t)ROBOT_Y_AXIS,MOTOR_TIMEOUT) == 3){continue;}}switch( robot_msg.type.router_msg.station ){case DJ_STA: //待机位station_target.y = config_get_ptr()->station_pmt.standby.y;station_target.z = config_get_ptr()->station_pmt.standby.z;break;case JIN_STA: //进料仓station_target.y = config_get_ptr()->station_pmt.depot_in.y;station_target.z = config_get_ptr()->station_pmt.depot_in.z;break;case FL1_STA: //废料位1station_target.y = config_get_ptr()->station_pmt.depot_a.y;station_target.z = config_get_ptr()->station_pmt.depot_a.z;break;case FL2_STA: //废料位2station_target.y = config_get_ptr()->station_pmt.depot_b.y;station_target.z = config_get_ptr()->station_pmt.depot_b.z;break;case ZB_STA: //制备位station_target.y = config_get_ptr()->station_pmt.zb_pos.y;station_target.z = config_get_ptr()->station_pmt.zb_pos.z;break;case JC_STA: //检测位station_target.y = config_get_ptr()->station_pmt.jc_pos[robot_msg.type.router_msg.index].y;station_target.z = config_get_ptr()->station_pmt.jc_pos[robot_msg.type.router_msg.index].z;break;case KZ_STA: //扩增位station_target.y = config_get_ptr()->station_pmt.kz_pos[robot_msg.type.router_msg.index].y;station_target.z = config_get_ptr()->station_pmt.kz_pos[robot_msg.type.router_msg.index].z;break;default:break;}//当前位置已经是待机位,直接运行Y轴坐标//运行到目标位置Z轴-20MM座标if( robot_msg.type.router_msg.station != ZB_STA ){dist = config_get_ptr()->station_pmt.depot_in.y;LOG_D("No5. Y-axis move to %s-H %d.%03d mm speed %d.%03d mm",\station_name[robot_msg.type.router_msg.station],\(int)(dist),\float_to_int(dist),\(int)config_get_ptr()->station_pmt.speed.y,\float_to_int(config_get_ptr()->station_pmt.speed.y));robot_move_distance(ROBOT_Y_AXIS, dist, config_get_ptr()->station_pmt.speed.y);if( motor_wait_stop((motor_no_t)ROBOT_Y_AXIS,MOTOR_TIMEOUT) == 3){continue;}}if( robot_msg.type.router_msg.station == KZ_STA || robot_msg.type.router_msg.station == JC_STA ||\robot_msg.type.router_msg.station == ZB_STA){dist = station_target.z + config_get_ptr()->avoid_hight;dist>ROBOT_Z_UP_MAX?dist=ROBOT_Z_UP_MAX:0;}else{dist = station_target.z;}//移动Y轴到目标位置坐标LOG_D("No6. Z-axis move to %s %d.%03d mm speed %d.%03d mm",\station_name[robot_msg.type.router_msg.station],\(int)dist,\float_to_int(dist),\(int)config_get_ptr()->station_pmt.speed.z,\float_to_int(config_get_ptr()->station_pmt.speed.z));robot_move_distance(ROBOT_Z_AXIS, dist, config_get_ptr()->station_pmt.speed.z);if( motor_wait_stop((motor_no_t)ROBOT_Z_AXIS,MOTOR_TIMEOUT) == 3){continue;}//移动到Y轴目标坐标上方dist = station_target.y;speed = config_get_ptr()->station_pmt.speed.y;LOG_D("No7. Y-axis move to %s %d.%03d mm speed %d.%03d mm",\station_name[robot_msg.type.router_msg.station],\(int)dist,\float_to_int(dist),\(int)(speed),\float_to_int(speed));robot_move_distance(ROBOT_Y_AXIS, dist, speed);if( motor_wait_stop((motor_no_t)ROBOT_Y_AXIS,MOTOR_TIMEOUT) == 3){continue;}//除待机位外,其它位置的最后下降速度减半if( robot_msg.type.router_msg.station == DJ_STA ){speed = config_get_ptr()->station_pmt.speed.z;}else{speed = config_get_ptr()->station_pmt.speed.z/2;}dist = station_target.z;LOG_D("No8. Z-axis move to %s %d.%03d mm speed %d.%03d mm",\station_name[robot_msg.type.router_msg.station],\(int)dist,\float_to_int(dist),\(int)(speed),\float_to_int(speed));robot_move_distance(ROBOT_Z_AXIS, dist, speed);if( motor_wait_stop((motor_no_t)ROBOT_Z_AXIS,MOTOR_TIMEOUT) == 3){continue;}robot_exe_exit:robot_state.curr_station = robot_msg.type.router_msg.station;comm_reply(EXE_OK,RBT_NO_ERR,STATION_MOVE_CMD,RT_NULL,0);}}//手抓控制else if( robot_msg.robot_cmd == ROBOT_CMD_CLAMP ){//抓取if( robot_msg.type.clamp_msg.clamp == CLAMP_TAKE ){robot_clamp(1);rt_thread_delay(500);if( clamp_status()==CLAMP_TAKE_UP ){comm_reply(EXE_OK,RBT_NO_ERR,STATION_CLAMP_CMD,RT_NULL,0);LOG_D("robot clamp take up OK");}else{comm_reply(EXE_OK,RBT_CLAMP_ERR,STATION_CLAMP_CMD,RT_NULL,0);LOG_E("robot clamp take up error");}}//释放else if( robot_msg.type.clamp_msg.clamp == CLAMP_PUT ){robot_clamp(0);rt_thread_delay(500);if( clamp_status()==CLAMP_PUT_DOWN ){comm_reply(EXE_OK,RBT_NO_ERR,CLAMP_CMD,RT_NULL,0);LOG_D("robot clamp put down OK");}else{comm_reply(EXE_OK,RBT_CLAMP_ERR,CLAMP_CMD,RT_NULL,0);LOG_E("robot clamp put down error");}}else if( robot_msg.type.clamp_msg.clamp == CLAMP_RESET ){clamp_power_up();comm_reply(EXE_OK,RBT_NO_ERR,CLAMP_CMD,RT_NULL,0);LOG_D("robot clamp reset");}}//仓位移位else if( robot_msg.robot_cmd == ROBOT_CMD_DEPOT ){float offset = 0;static const uint8_t depot_cmd[] = {DEPOT_IN_CMD,DEPOT_A_CMD,DEPOT_B_CMD};if( robot_msg.type.depot_msg.axle == ROBOT_IN_AXIS ){offset = config_get_ptr()->depot_offset.depot_in;}else if( robot_msg.type.depot_msg.axle == ROBOT_A_AXIS ){offset = config_get_ptr()->depot_offset.depot_a;}else if( robot_msg.type.depot_msg.axle == ROBOT_B_AXIS ){offset = config_get_ptr()->depot_offset.depot_b;}if( robot_msg.type.depot_msg.loc == 0x00 ){dist = config_get_ptr()->depot_pmt[robot_msg.type.depot_msg.axle-ROBOT_IN_AXIS].door;}else if( robot_msg.type.depot_msg.loc == 0x01 ){dist = config_get_ptr()->depot_pmt[robot_msg.type.depot_msg.axle-ROBOT_IN_AXIS].clamp + offset*robot_msg.type.depot_msg.station;}else if( robot_msg.type.depot_msg.loc == 0x02 ){dist = config_get_ptr()->depot_pmt[robot_msg.type.depot_msg.axle-ROBOT_IN_AXIS].chip + offset*robot_msg.type.depot_msg.station;}else if( robot_msg.type.depot_msg.loc == 0x03 ){dist = config_get_ptr()->depot_pmt[robot_msg.type.depot_msg.axle-ROBOT_IN_AXIS].scaner + offset*robot_msg.type.depot_msg.station;}speed = config_get_ptr()->depot_pmt[robot_msg.type.depot_msg.loc].speed;if( robot_msg.type.depot_msg.action == ACT_MOVE ){robot_move_distance(robot_msg.type.depot_msg.axle, dist, speed);motor_wait_stop(robot_msg.type.depot_msg.axle,MOTOR_TIMEOUT);}else if( robot_msg.type.depot_msg.action == ACT_STOP ){motor_stop(robot_msg.type.depot_msg.axle);}if( robot_msg.type.depot_msg.axle == ROBOT_IN_AXIS ){LOG_D("depot in move to %d.%d",(int)dist,float_to_int(dist));}else if( robot_msg.type.depot_msg.axle == ROBOT_A_AXIS ){LOG_D("depot a move to %d.%d",(int)dist,float_to_int(dist));}else if( robot_msg.type.depot_msg.axle == ROBOT_B_AXIS ){LOG_D("depot b move to %d.%d",(int)dist,float_to_int(dist));}comm_reply(EXE_OK,RBT_NO_ERR,depot_cmd[robot_msg.type.depot_msg.axle-ROBOT_IN_AXIS],RT_NULL,0);}//电机原点初始化else if( robot_msg.robot_cmd == ROBOT_CMD_INIT ){if( robot_reset(robot_msg.type.init_msg.motor_no) == RT_EOK ){LOG_D("motor %d reset OK",robot_msg.type.init_msg.motor_no);}else{LOG_E("motor %d reset failed",robot_msg.type.init_msg.motor_no);}}}}
}
比较消息队列发送的运动控制命令,例如单轴移动调试,运动路径路由,电机的初始化,手抓的控制,都将调用电机移位控制函数,执行成功与否通过comm_replay返回执行结果,电机移位控制功能可参考我博客另一篇关于步进电机S曲线计算https://editor.csdn.net/md/?articleId=132959818