Autoware.ai安装
- 1 ROS安装
- 2 Ubuntu18.04安装Qt5.14.2
- 3 安装GCC、G++
- 4 Autoware安装与编译
- 4.1 针对Ubuntu 18.04 / Melodic的依赖包安装
- 4.2 Autoware环境搭建
- 4.3 运行 Autoware
- 4.4 ROSBAG Demo
1 ROS安装
参考笔者的博客即可:【ROS】Ubuntu18.04安装Ros
2 Ubuntu18.04安装Qt5.14.2
QT官网下载qt-opensource-linux-x64-5.14.2.run
执行如下的安装步骤:
sudo chmod -R 777 qt-opensource-linux-x64-5.14.2.run
sudo ./qt-opensource-linux-x64-5.14.2.run //将Qt安装在/opt目录
# 配置环境:Qt 安装完成后,先别打开,因为还需要安装其他工具以及库文件
sudo apt-get install gcc g++ //安装 linux 下编程的编译器
sudo apt-get install libqt4-dev //不然编译时会出现错误“cannot find -lgl
sudo apt-get install build-essential //它可以使得我们的程序知道头文件和库函数放在哪个位置
添加环境变量
# 1 对profile进行修改
sudo gedit /etc/profile
# 2 添加环境变量
export QTDIR=/opt/Qt5.14.2/5.14.2
export PATH=$QTDIR/gcc_64/bin:$PATH
export LD_LIBRARY_PATH=$QTDIR/gcc_64/lib:$LD_LIBRARY_PATH
# 3 生效
source /etc/profile
查看版本
qmake -v
参考链接:Ubuntu18.04安装Qt5.14.2
3 安装GCC、G++
sudo apt-get install gcc-7 gcc-7-multilib
sudo apt-get install g++-7 g++-7-multilib
如果已经安装了GCC、G++但版本不够,升级一下:
sudo apt-get install -y gcc-7
sudo apt-get install -y g++-7
cd /usr/bin
sudo rm gcc
sudo ln -s gcc-7 gcc
sudo rm g++
sudo ln -s g++-7 g++
4 Autoware安装与编译
安装官网链接链接:https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/wikis/Source-Build
Autoware的GitLab 仓库
笔者的安装流程如下:
4.1 针对Ubuntu 18.04 / Melodic的依赖包安装
sudo apt update
sudo apt install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin
sudo apt install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
pip3 install -U setuptools
4.2 Autoware环境搭建
创建工作空间
mkdir -p autoware.ai/src
cd autoware.ai
下载Autoware.AI的工作区配置
wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/master/autoware.ai.repos?inline=false"
vcs import src < autoware.ai.repos
使用rosdep安装依赖项
rosdep update
报错1:ROS rosdep update更新失败

解决方法:
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
再下载依赖
# rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
rosdep install -y --from-paths src --ignore-src --rosdistro=melodic -y
执行成功则显示如下:

报错2:如下
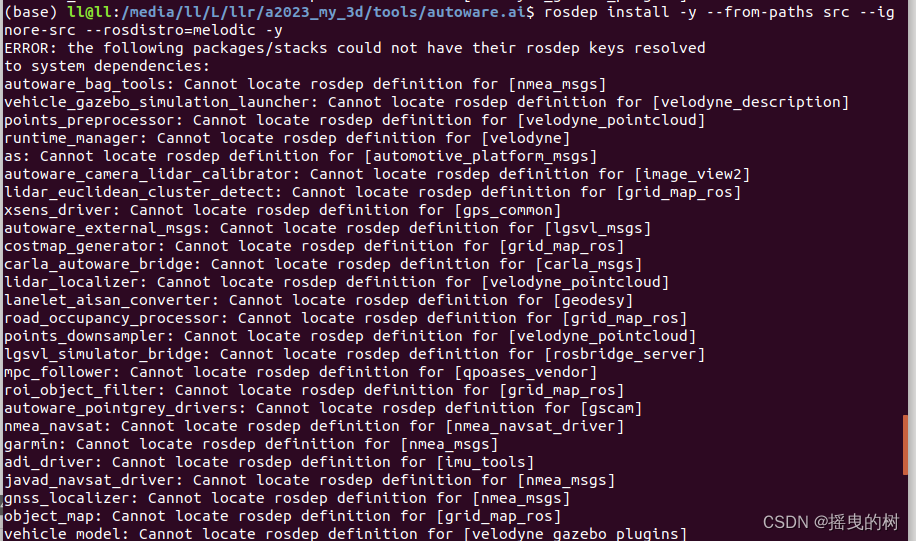
解决方法:
sudo apt-get install ros-melodic-nmea-msgs # ros-melodic+需要安装的依赖包(报错中[]的内容,并将下“_”改成“-”)
sudo apt-get install ros-melodic-image-view2
# 以此类推逐一下载,直到再次运行如下指令,并出现如图的结果
rosdep install -y --from-paths src --ignore-src --rosdistro=melodic -y
#All required rosdeps installed successfully
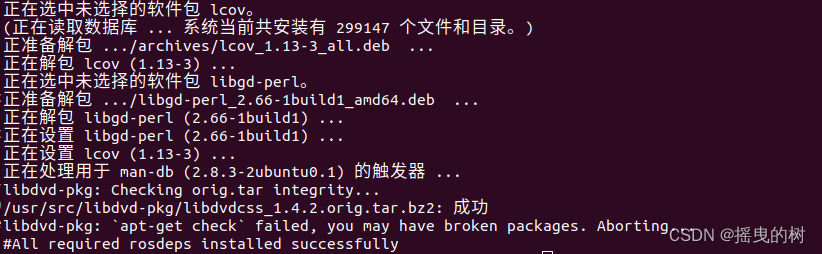
代表此问题解决!
使用CUDA支持编译工作空间
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
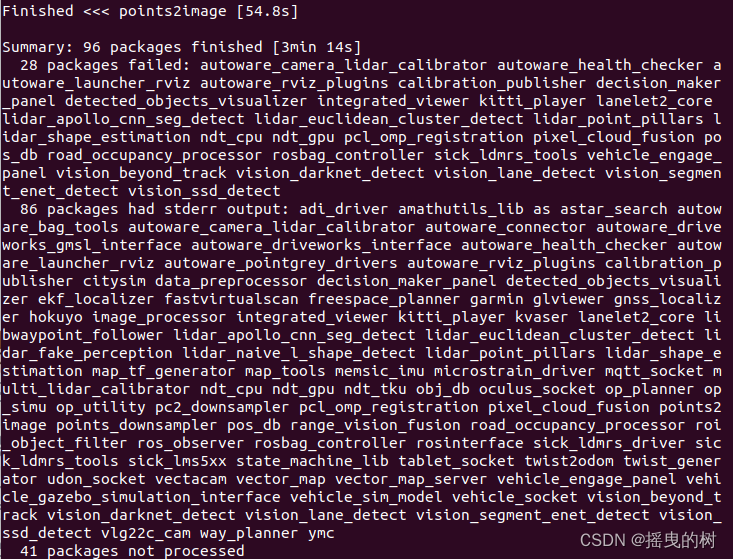
报错如下

但是在部分报错的包一般是不会用到的,可以在指令后面加入参数【–continue-on-error】忽略报错,到在后面的应用时有需要再添加。
重新执行指令如下:
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --continue-on-error
4.3 运行 Autoware
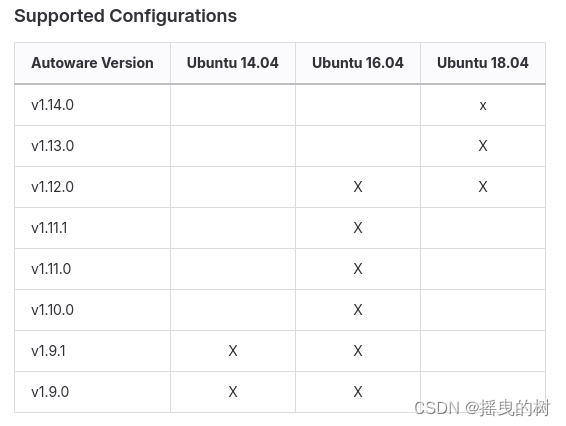
For Autoware version 1.12.0 and Newer
更早的版本运行指令详见ROSBAG Demo
cd ./autoware.ai
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
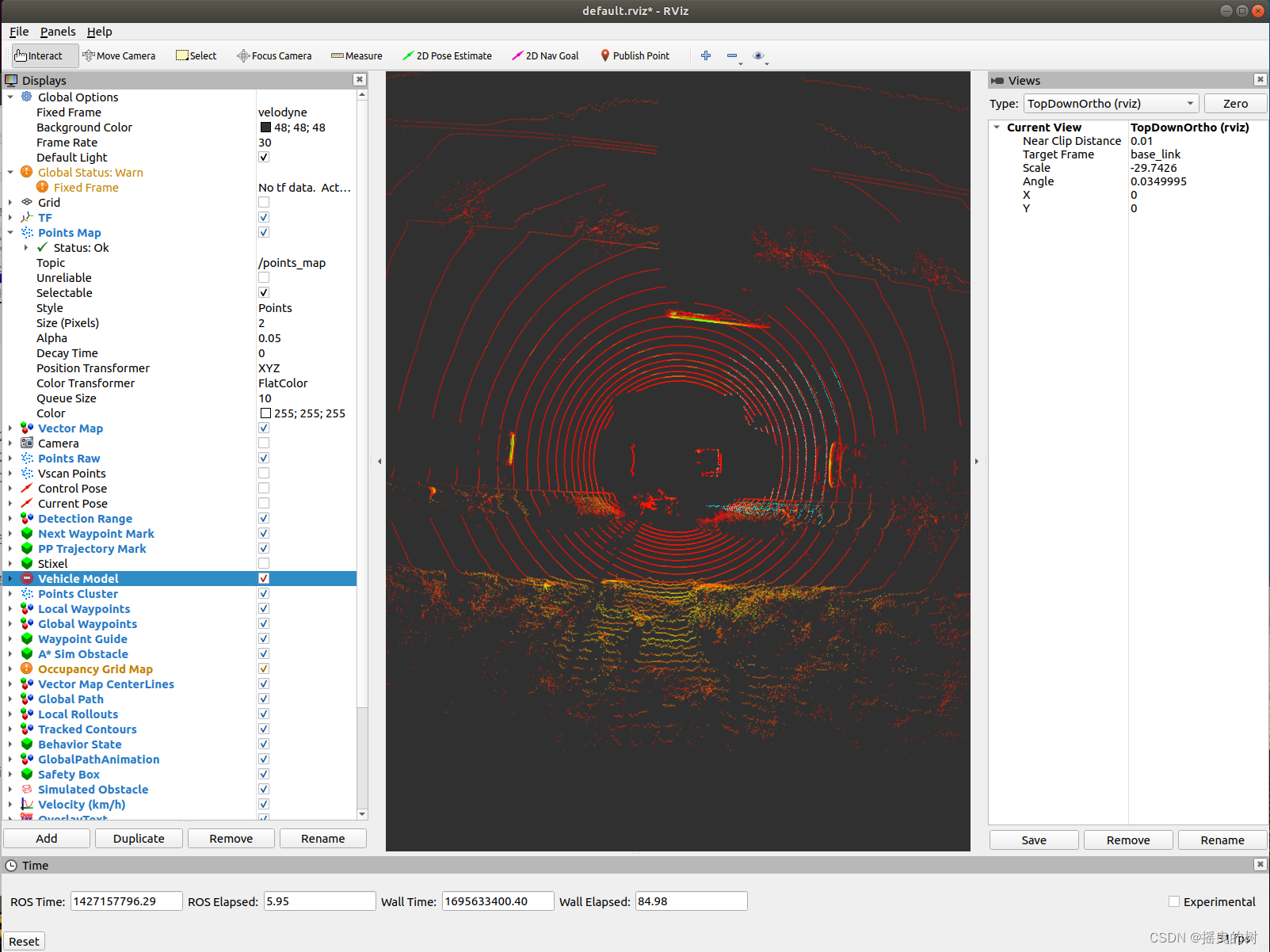
又启动一个Autoware的终端如下:
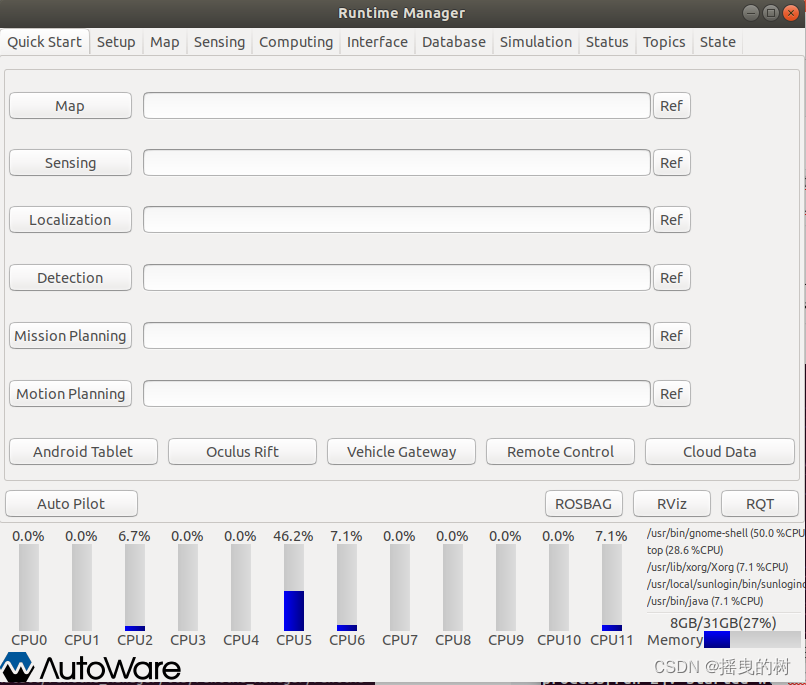
Autoware的界面如下:
参考链接:
链接1:Autoware 安装(源码)过程 与 踩坑记录(Ubuntu18.04)
链接2:NVIDIA Jetson Nano主机的autoware的学习与demo运行-第7章-Autoware源码安装
链接3:【Autoware】2小时安装Autoware1.13(保姆级教程)
4.4 ROSBAG Demo
官网链接:ROSBAG Demo