2025-04-18 李沐深度学习3 —— 线性代数
文章目录
- 1 线性代数
- 1.1 标量、向量与矩阵
- 1.2 矩阵概念
- 1.3 按特定轴求和
- 2 实战:线性代数
- 2.1 标量
- 2.2 向量
- 2.3 矩阵
- 2.4 张量
- 2.5 降维
- 2.6 点积
- 2.7 矩阵-向量积
- 2.8 矩阵-矩阵乘法
- 2.9 范数
- 2.10 练习
1 线性代数

1.1 标量、向量与矩阵
标量(Scalar)
- 定义:单个数值(如 a = 3 a=3 a=3),是 0 维张量。
- 运算规则:
- 加减乘除: c = a + b c = a + b c=a+b。
- 绝对值(长度): ∣ a ∣ |a| ∣a∣,满足三角不等式 ∣ a + b ∣ ≤ ∣ a ∣ + ∣ b ∣ |a+b| ≤ |a| + |b| ∣a+b∣≤∣a∣+∣b∣。

向量(Vector)
-
定义:一维数组(如 [ 1 , 2 , 3 ] [1,2,3] [1,2,3]),是 1 维张量。
-
操作:
- 按元素运算: c = a + b c = a + b c=a+b( c i = a i + b i c_i = a_i + b_i ci=ai+bi)。
- 标量乘法: c = α ⋅ b c = α·b c=α⋅b( c i = α ⋅ b i c_i = α·b_i ci=α⋅bi)。
- 向量长度(L2 范数): ∣ ∣ a ∣ ∣ = ( ∑ a i 2 ) ||a|| = \sqrt{(∑a_i²)} ∣∣a∣∣=(∑ai2)。

- 点积(内积): a ⋅ b = ∑ a i ⋅ b i a·b = ∑a_i·b_i a⋅b=∑ai⋅bi,正交时 a ⋅ b = 0 a·b=0 a⋅b=0。

-
几何意义:
- 向量加法:平行四边形法则(如图,蓝 + 黄 = 绿向量)
- 标量乘法:向量缩放(拉伸或压缩)

矩阵(Matrix)
-
定义:二维数组(如 [ [ 1 , 2 ] , [ 3 , 4 ] ] [[1,2],[3,4]] [[1,2],[3,4]]),是 2 维张量。
-
核心运算:
- 按元素运算:同向量(如 C = A + B C = A + B C=A+B)。

-
矩阵乘法: C = A ⋅ B C = A·B C=A⋅B。(行乘列内积)
- 几何意义:空间线性变换(扭曲空间,如旋转/缩放)。
- 示例:若 A A A 将蓝/绿向量映射为新方向,则 A A A 代表该变换。


-
转置: A T A^T AT(行列互换),对称矩阵满足 A = A T A = A^T A=AT。
1.2 矩阵概念
范数(Norm)
-
向量范数:L2 范数(欧氏距离)最常用。
-
矩阵范数:
- Frobenius范数: ∣ ∣ A ∣ ∣ F r o = ( ∑ ∑ A i j 2 ) ||A||_{Fro} = \sqrt{(∑∑A_ij²)} ∣∣A∣∣Fro=(∑∑Aij2)(类似向量 L2 范数)
-
诱导范数:最小化 ∣ ∣ A ⋅ x ∣ ∣ / ∣ ∣ x ∣ ∣ ||A·x|| / ||x|| ∣∣A⋅x∣∣/∣∣x∣∣(用于理论分析)

特殊矩阵
| 类型 | 定义 | 深度学习应用 |
|---|---|---|
| 对称矩阵 | A = A T A = A^T A=AT | 参数优化(如 Hessian 矩阵) |
| 正交矩阵 | U ⋅ U T = I U·U^T = I U⋅UT=I(行/列正交) | 初始化(避免梯度消失/爆炸) |
| 置换矩阵 | 每行/列只有一个 1,其余为 0 | 数据重排(如 ShuffleNet) |


特征分解
- 特征向量/值: A ⋅ v = λ ⋅ v A·v = λ·v A⋅v=λ⋅v( v v v 方向不变,仅缩放 λ λ λ 倍)
- 意义:
- 对称矩阵总能特征分解(PCA 降维基础)
- 非对称矩阵可能无实数特征值(需复数域分析)

1.3 按特定轴求和
张量 shape 属性
- 描述张量在每个维度的长度,例如
shape=[5,4]表示 5 行 4 列的矩阵。 - 轴编号:从 0 开始,
axis=0对应第一个维度(行),axis=1对应第二个维度(列)。
沿轴求和
- 操作定义:沿指定轴对元素求和,结果会消除该轴(除非设置
keepdims=True)。 - 几何意义:
axis=0:将每一列压缩为一个值(纵向压缩)。axis=1:将每一行压缩为一个值(横向压缩)。

2 实战:线性代数
2.1 标量
标量由只有一个元素的张量表示。 下面的代码将实例化两个标量,并执行一些熟悉的算术运算,即加法、乘法、除法和指数。
import torchx = torch.tensor(3.0)
y = torch.tensor(2.0)x + y, x * y, x / y, x**y

2.2 向量
向量可以被视为标量值组成的列表。 这些标量值被称为向量的元素(element)或分量(component)。
在数学表示法中,向量通常记为粗体、小写的符号(例如, x \mathbf{x} x、 y \mathbf{y} y 和 z \mathbf{z} z)。
x = torch.arange(4)
x

在数学中,向量 x \mathbf{x} x 可以写为:
x = [ x 1 x 2 ⋮ x n ] \mathbf{x} =\begin{bmatrix}x_{1} \\x_{2} \\ \vdots \\x_{n}\end{bmatrix} x= x1x2⋮xn
其中 x 1 , … , x n x_1,\ldots,x_n x1,…,xn 是向量的元素。在代码中,我们通过张量的索引来访问任一元素。
注意,元素 x i x_i xi 是一个标量,所以我们在引用它时不会加粗。
x[3]

长度、维度和形状
-
长度
向量中元素的个数。
-
形状
是一个元素组,列出了张量沿每个轴的长度(维数)。对于只有一个轴的张量,形状只有一个元素。
-
维度
在不同上下文时往往会有不同的含义,这经常会使人感到困惑。为了清楚起见,我们在此明确一下:
- 向量或轴的维度被用来表示向量或轴的长度,即向量或轴的元素数量。
- 张量的维度用来表示张量具有的轴数。
在这个意义上,张量的某个轴的维数就是这个轴的长度。
在数学表示法中,如果我们想说一个向量 x \mathbf{x} x 由 n n n 个实值标量组成,可以将其表示为 x ∈ R n \mathbf{x}\in\mathbb{R}^n x∈Rn。
向量的长度通常称为向量的维度(dimension)。
len(x), x.shape # 长度,形状

2.3 矩阵
我们通常用粗体、大写字母来表示矩阵(例如, X \mathbf{X} X、 Y \mathbf{Y} Y 和 Z \mathbf{Z} Z),在代码中表示为具有两个轴的张量。
数学表示法使用 A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n 来表示矩阵 A \mathbf{A} A,其由 m m m 行和 n n n 列的实值标量组成。其中每个元素 a i j a_{ij} aij 属于第 i i i 行第 j j j 列:
A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a m 1 a m 2 ⋯ a m n ] \mathbf{A}=\begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \\ \end{bmatrix} A= a11a21⋮am1a12a22⋮am2⋯⋯⋱⋯a1na2n⋮amn
对于任意 A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n, A \mathbf{A} A 的形状是( m , n m,n m,n)或 m × n m \times n m×n。当矩阵具有相同数量的行和列时,其形状将变为正方形,因此被称为方阵(square matrix)。
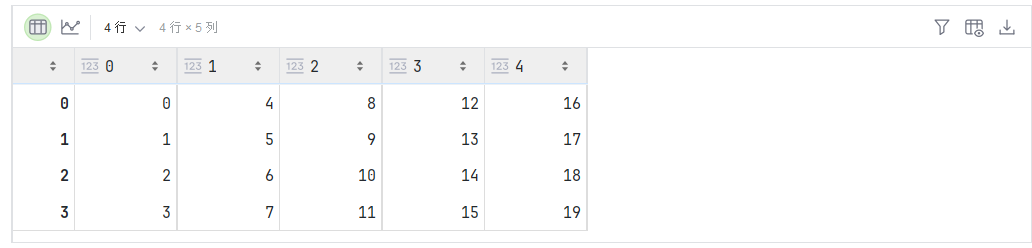
A = torch.arange(20).reshape(5, 4)
A
使用 A.T 访问矩阵 A \mathbf{A} A 的转置:
A.T
2.4 张量
张量就像向量是标量的推广,矩阵是向量的推广一样,我们可以构建具有更多轴的数据结构。
X = paddle.reshape(paddle.arange(24), (2, 3, 4))
X

任何按元素的一元运算都不会改变其操作数的形状。 同样,给定具有相同形状的任意两个张量,任何按元素二元运算的结果都将是相同形状的张量。 例如,将两个相同形状的矩阵相加,会在这两个矩阵上执行元素加法。
A = paddle.reshape(paddle.arange(20, dtype=paddle.float32), (5, 4))
B = A.clone() # 通过分配新内存,将A的一个副本分配给B
A, A + B

两个矩阵的按元素乘法称为 Hadamard 积(Hadamard product,数学符号 ⊙ \odot ⊙)。
对于矩阵 B ∈ R m × n \mathbf{B} \in \mathbb{R}^{m \times n} B∈Rm×n,矩阵 A \mathbf{A} A 和 B \mathbf{B} B 的 Hadamard 积为:
A ⊙ B = [ a 11 b 11 a 12 b 12 … a 1 n b 1 n a 21 b 21 a 22 b 22 … a 2 n b 2 n ⋮ ⋮ ⋱ ⋮ a m 1 b m 1 a m 2 b m 2 … a m n b m n ] \mathbf{A} \odot \mathbf{B} = \begin{bmatrix} a_{11} b_{11} & a_{12} b_{12} & \dots & a_{1n} b_{1n} \\ a_{21} b_{21} & a_{22} b_{22} & \dots & a_{2n} b_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} b_{m1} & a_{m2} b_{m2} & \dots & a_{mn} b_{mn} \end{bmatrix} A⊙B= a11b11a21b21⋮am1bm1a12b12a22b22⋮am2bm2……⋱…a1nb1na2nb2n⋮amnbmn
A * B
将张量乘以或加上一个标量不会改变张量的形状,其中张量的每个元素都将与标量相加或相乘。
a = 2
X = paddle.reshape(paddle.arange(24), (2, 3, 4))
a + X, (a * X).shape

2.5 降维
在代码中调用计算求和的函数:
x = torch.arange(4, dtype=torch.float32)
x, x.sum()

我们可以表示任意形状张量的元素和。例如,矩阵 A \mathbf{A} A 中元素的和可以记为 ∑ i = 1 m ∑ j = 1 n a i j \sum_{i=1}^{m} \sum_{j=1}^{n} a_{ij} ∑i=1m∑j=1naij。
A.shape, A.sum()

默认情况下,调用求和函数会沿所有的轴降低张量的维度,使它变为一个标量。我们还可以指定张量沿哪一个轴来通过求和降低维度。
以矩阵为例,为了通过求和所有行的元素来降维(轴 0),可以在调用函数时指定axis=0。
由于输入矩阵沿 0 轴降维以生成输出向量,因此输入轴 0 的维数在输出形状中消失。
A_sum_axis0 = A.sum(axis=0)
A_sum_axis0, A_sum_axis0.shape

沿着行和列对矩阵求和,等价于对矩阵的所有元素进行求和。
A.sum(axis=[0, 1]) # 结果和A.sum()相同

一个与求和相关的量是平均值(mean 或 average)。通过将总和除以元素总数来计算平均值。在代码中,我们可以调用函数来计算任意形状张量的平均值。
A.mean(), A.sum() / A.numel() # 等价

非降维求和
有时在调用函数来计算总和或均值时保持轴数不变会很有用。
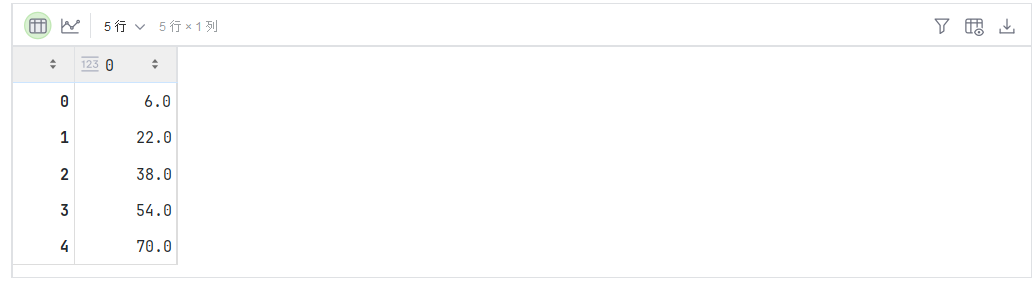
sum_A = A.sum(axis=1, keepdims=True)
sum_A
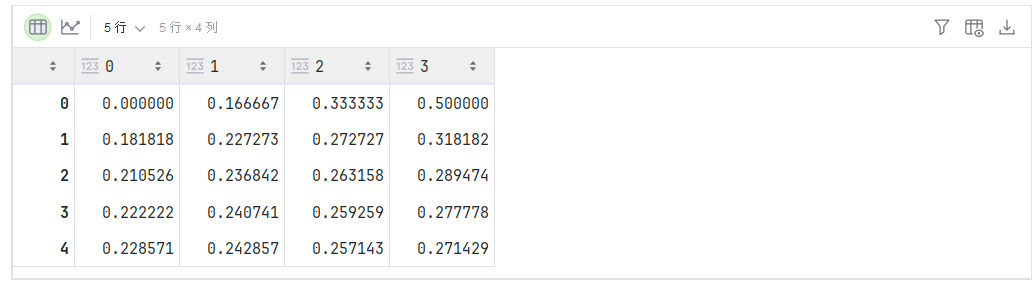
例如,由于sum_A在对每行进行求和后仍保持两个轴,我们可以通过广播将A除以sum_A。
A / sum_A
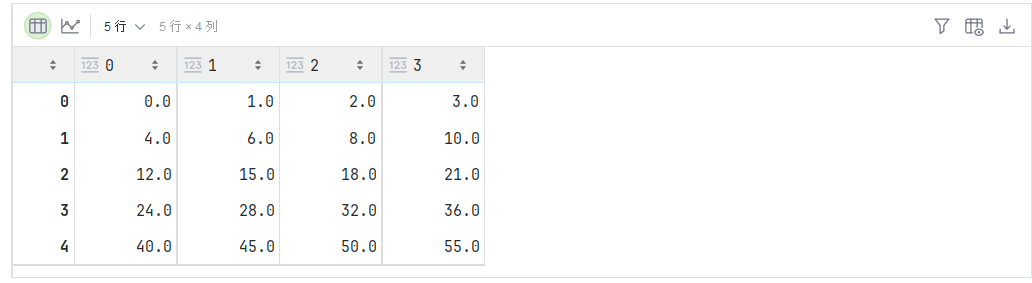
如果我们想沿某个轴计算A元素的累积总和, 比如axis=0(按行计算),可以调用cumsum函数。 此函数不会沿任何轴降低输入张量的维度。
A.cumsum(axis=0)
2.6 点积
给定两个向量 x , y ∈ R d \mathbf{x},\mathbf{y}\in\mathbb{R}^d x,y∈Rd,它们的点积(dot product) x ⊤ y \mathbf{x}^\top\mathbf{y} x⊤y(或 ⟨ x , y ⟩ \langle\mathbf{x},\mathbf{y}\rangle ⟨x,y⟩)是相同位置的按元素乘积的和: x ⊤ y = ∑ i = 1 d x i y i \mathbf{x}^\top \mathbf{y} = \sum_{i=1}^{d} x_i y_i x⊤y=∑i=1dxiyi。
y = torch.ones(4, dtype = torch.float32)
x, y, torch.dot(x, y)

也可以通过执行按元素乘法,然后进行求和来表示两个向量的点积:
torch.sum(x * y)

2.7 矩阵-向量积
回顾分别矩阵 A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n 和向量 x ∈ R n \mathbf{x} \in \mathbb{R}^n x∈Rn,将矩阵 A \mathbf{A} A 用它的行向量表示:
A = [ a 1 ⊤ a 2 ⊤ ⋮ a m ⊤ ] \mathbf{A}= \begin{bmatrix} \mathbf{a}^\top_{1} \\ \mathbf{a}^\top_{2} \\ \vdots \\ \mathbf{a}^\top_m \\ \end{bmatrix} A= a1⊤a2⊤⋮am⊤
其中每个 a i ⊤ ∈ R n \mathbf{a}^\top_{i} \in \mathbb{R}^n ai⊤∈Rn 都是行向量,表示矩阵的第 i i i 行。
矩阵向量积 A x \mathbf{A}\mathbf{x} Ax 是一个长度为 m m m 的列向量,其第 i i i 个元素是点积 a i ⊤ x \mathbf{a}^\top_i \mathbf{x} ai⊤x:
A x = [ a 1 ⊤ a 2 ⊤ ⋮ a m ⊤ ] x = [ a 1 ⊤ x a 2 ⊤ x ⋮ a m ⊤ x ] \mathbf{A}\mathbf{x} = \begin{bmatrix} \mathbf{a}^\top_{1} \\ \mathbf{a}^\top_{2} \\ \vdots \\ \mathbf{a}^\top_m \\ \end{bmatrix}\mathbf{x} = \begin{bmatrix} \mathbf{a}^\top_{1} \mathbf{x} \\ \mathbf{a}^\top_{2} \mathbf{x} \\ \vdots\\ \mathbf{a}^\top_{m} \mathbf{x}\\ \end{bmatrix} Ax= a1⊤a2⊤⋮am⊤ x= a1⊤xa2⊤x⋮am⊤x
我们可以把一个矩阵 A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n 乘法看作一个从 R n \mathbb{R}^{n} Rn 到 R m \mathbb{R}^{m} Rm 向量的转换。
通常,使用矩阵-向量积来描述在给定前一层的值时,求解神经网络每一层所需的复杂计算。
A.shape, x.shape, torch.mv(A, x)

2.8 矩阵-矩阵乘法
假设有两个矩阵 A ∈ R n × k \mathbf{A} \in \mathbb{R}^{n \times k} A∈Rn×k 和 B ∈ R k × m \mathbf{B} \in \mathbb{R}^{k \times m} B∈Rk×m:
A = [ a 11 a 12 ⋯ a 1 k a 21 a 22 ⋯ a 2 k ⋮ ⋮ ⋱ ⋮ a n 1 a n 2 ⋯ a n k ] , B = [ b 11 b 12 ⋯ b 1 m b 21 b 22 ⋯ b 2 m ⋮ ⋮ ⋱ ⋮ b k 1 b k 2 ⋯ b k m ] \mathbf{A}=\begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1k} \\ a_{21} & a_{22} & \cdots & a_{2k} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1} & a_{n2} & \cdots & a_{nk} \\ \end{bmatrix},\quad \mathbf{B}=\begin{bmatrix} b_{11} & b_{12} & \cdots & b_{1m} \\ b_{21} & b_{22} & \cdots & b_{2m} \\ \vdots & \vdots & \ddots & \vdots \\ b_{k1} & b_{k2} & \cdots & b_{km} \\ \end{bmatrix} A= a11a21⋮an1a12a22⋮an2⋯⋯⋱⋯a1ka2k⋮ank ,B= b11b21⋮bk1b12b22⋮bk2⋯⋯⋱⋯b1mb2m⋮bkm
用行向量 a i ⊤ ∈ R k \mathbf{a}^\top_{i} \in \mathbb{R}^k ai⊤∈Rk 表示矩阵 A \mathbf{A} A 的第 i i i 行,并让列向量 b j ∈ R k \mathbf{b}_{j} \in \mathbb{R}^k bj∈Rk 作为矩阵 B \mathbf{B} B的第 j j j列。要生成矩阵积 C = A B \mathbf{C} = \mathbf{A}\mathbf{B} C=AB,最简单的方法是考虑 A \mathbf{A} A 的行向量和 B \mathbf{B} B 的列向量:
A = [ a 1 ⊤ a 2 ⊤ ⋮ a n ⊤ ] , B = [ b 1 b 2 ⋯ b m ] \mathbf{A}= \begin{bmatrix} \mathbf{a}^\top_{1} \\ \mathbf{a}^\top_{2} \\ \vdots \\ \mathbf{a}^\top_n \\ \end{bmatrix}, \quad \mathbf{B}=\begin{bmatrix} \mathbf{b}_{1} & \mathbf{b}_{2} & \cdots & \mathbf{b}_{m} \\ \end{bmatrix} A= a1⊤a2⊤⋮an⊤ ,B=[b1b2⋯bm]
当我们简单地将每个元素 c i j c_{ij} cij 计算为点积 a i ⊤ b j \mathbf{a}^\top_i \mathbf{b}_j ai⊤bj:
C = A B = [ a 1 ⊤ a 2 ⊤ ⋮ a n ⊤ ] [ b 1 b 2 ⋯ b m ] = [ a 1 ⊤ b 1 a 1 ⊤ b 2 ⋯ a 1 ⊤ b m a 2 ⊤ b 1 a 2 ⊤ b 2 ⋯ a 2 ⊤ b m ⋮ ⋮ ⋱ ⋮ a n ⊤ b 1 a n ⊤ b 2 ⋯ a n ⊤ b m ] \mathbf{C} = \mathbf{AB} = \begin{bmatrix} \mathbf{a}^\top_{1} \\ \mathbf{a}^\top_{2} \\ \vdots \\ \mathbf{a}^\top_n \\ \end{bmatrix} \begin{bmatrix} \mathbf{b}_{1} & \mathbf{b}_{2} & \cdots & \mathbf{b}_{m} \\ \end{bmatrix} = \begin{bmatrix} \mathbf{a}^\top_{1} \mathbf{b}_1 & \mathbf{a}^\top_{1}\mathbf{b}_2& \cdots & \mathbf{a}^\top_{1} \mathbf{b}_m \\ \mathbf{a}^\top_{2}\mathbf{b}_1 & \mathbf{a}^\top_{2} \mathbf{b}_2 & \cdots & \mathbf{a}^\top_{2} \mathbf{b}_m \\ \vdots & \vdots & \ddots &\vdots\\ \mathbf{a}^\top_{n} \mathbf{b}_1 & \mathbf{a}^\top_{n}\mathbf{b}_2& \cdots& \mathbf{a}^\top_{n} \mathbf{b}_m \end{bmatrix} C=AB= a1⊤a2⊤⋮an⊤ [b1b2⋯bm]= a1⊤b1a2⊤b1⋮an⊤b1a1⊤b2a2⊤b2⋮an⊤b2⋯⋯⋱⋯a1⊤bma2⊤bm⋮an⊤bm
可以将矩阵-矩阵乘法 A B \mathbf{AB} AB 看作执行 m m m 次矩阵-向量积,并将结果拼接在一起,形成一个 n × m n \times m n×m 矩阵。
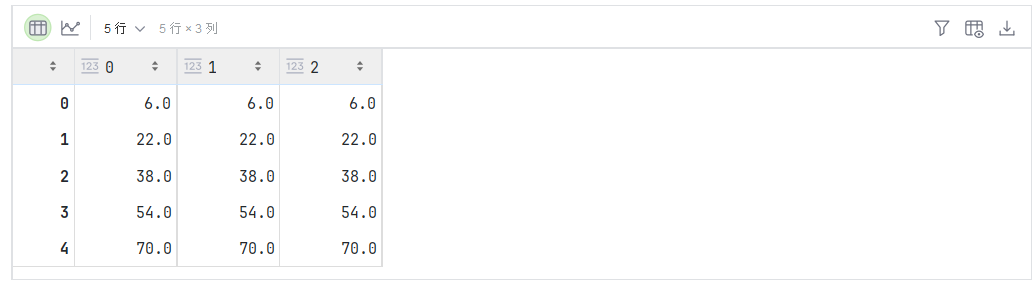
在下面的代码中,我们在A和B上执行矩阵乘法。这里的A是一个 5 行 4 列的矩阵,B是一个 4 行 3 列的矩阵。两者相乘后,我们得到了一个 5 行 3 列的矩阵。
B = torch.ones(4, 3)
torch.mm(A, B)
2.9 范数
向量的范数表示一个向量有多大。这里考虑的大小(size)概念不涉及维度,而是分量的大小。在线性代数中,向量范数是将向量映射到标量的函数 f f f。
给定任意向量 x \mathbf{x} x,向量范数要满足一些属性:
-
如果按常数因子 α \alpha α 缩放向量的所有元素,其范数也会按相同常数因子的绝对值缩放:
f ( α x ) = ∣ α ∣ f ( x ) f(\alpha \mathbf{x}) = |\alpha| f(\mathbf{x}) f(αx)=∣α∣f(x) -
满足三角不等式:
f ( x + y ) ≤ f ( x ) + f ( y ) f(\mathbf{x} + \mathbf{y}) \leq f(\mathbf{x}) + f(\mathbf{y}) f(x+y)≤f(x)+f(y) -
范数必须是非负的:
f ( x ) ≥ 0 f(\mathbf{x}) \geq 0 f(x)≥0
因为在大多数情况下,任何东西的最小的大小是 0。 -
要求范数最小为 0,当且仅当向量全由 0 组成:
∀ i , [ x ] i = 0 ⇔ f ( x ) = 0 \forall i, [\mathbf{x}]_i = 0 \Leftrightarrow f(\mathbf{x})=0 ∀i,[x]i=0⇔f(x)=0
范数很像距离的度量。
L 2 L_2 L2 范数
假设 n n n 维向量 x \mathbf{x} x 中的元素是 x 1 , … , x n x_1,\ldots,x_n x1,…,xn,其 L 2 L_2 L2 范数是向量元素平方和的平方根:
∥ x ∥ 2 = ∑ i = 1 n x i 2 , \|\mathbf{x}\|_2 = \sqrt{\sum_{i=1}^n x_i^2}, ∥x∥2=i=1∑nxi2,
其中,在 L 2 L_2 L2 范数中常常省略下标 2 2 2,即 ∥ x ∥ \|\mathbf{x}\| ∥x∥ 等同于 ∥ x ∥ 2 \|\mathbf{x}\|_2 ∥x∥2。
在代码中,我们可以按如下方式计算向量的 L 2 L_2 L2 范数。
u = torch.tensor([3.0, -4.0])
torch.norm(u)

L 1 L_1 L1 范数
L 1 L_1 L1 范数将绝对值函数和按元素求和组合起来。
∥ x ∥ 1 = ∑ i = 1 n ∣ x i ∣ \|\mathbf{x}\|_1 = \sum_{i=1}^n \left|x_i \right| ∥x∥1=i=1∑n∣xi∣
L 1 L_1 L1 范数受异常值的影响较小。
torch.abs(u).sum()

Frobenius 范数(Frobenius norm)
矩阵 X ∈ R m × n \mathbf{X} \in \mathbb{R}^{m \times n} X∈Rm×n 的 Frobenius 范数是矩阵元素平方和的平方根:
∥ X ∥ F = ∑ i = 1 m ∑ j = 1 n x i j 2 \|\mathbf{X}\|_F = \sqrt{\sum_{i=1}^m \sum_{j=1}^n x_{ij}^2} ∥X∥F=i=1∑mj=1∑nxij2
Frobenius 范数满足向量范数的所有性质,它就像是矩阵形向量的 L 2 L_2 L2 范数。
调用以下函数将计算矩阵的 Frobenius 范数。
torch.norm(torch.ones((4, 9)))

2.10 练习
-
证明一个矩阵 A \mathbf{A} A 的转置的转置是 A \mathbf{A} A,即 ( A ⊤ ) ⊤ = A (\mathbf{A}^\top)^\top = \mathbf{A} (A⊤)⊤=A。
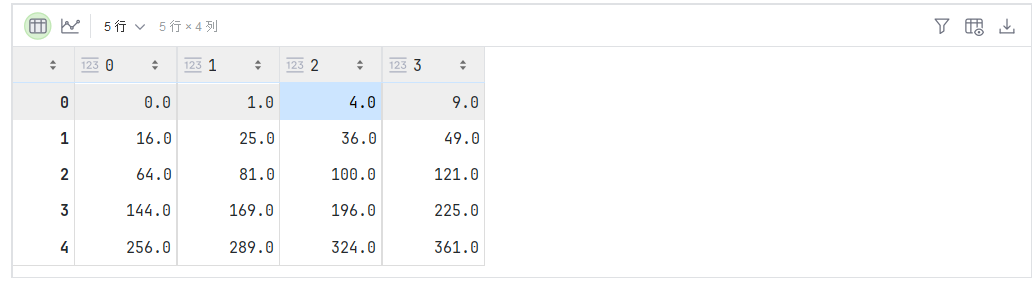
A.T.T == A
-
给出两个矩阵 A \mathbf{A} A 和 B \mathbf{B} B,证明“它们转置的和”等于“它们和的转置”,即 A ⊤ + B ⊤ = ( A + B ) ⊤ \mathbf{A}^\top + \mathbf{B}^\top = (\mathbf{A} + \mathbf{B})^\top A⊤+B⊤=(A+B)⊤。
A = torch.arange(20).reshape(5, 4)B = torch.arange(20).reshape(5, 4) + 1A.T + B.T, (A + B).T
-
给定任意方阵 A \mathbf{A} A, A + A ⊤ \mathbf{A} + \mathbf{A}^\top A+A⊤总是对称的吗?为什么?
答:是的。由前两问可知, ( A + A T ) T = A T + ( A T ) T = A T + A (\mathbf{A}+\mathbf{A}^T)^T = \mathbf{A}^T+(\mathbf{A}^T)^T=\mathbf{A}^T+\mathbf{A} (A+AT)T=AT+(AT)T=AT+A,且矩阵加法满足交换律。
A + A T = [ a 11 + a 11 a 12 + a 21 ⋯ a 1 n + a n 1 a 21 + a 12 a 22 + a 22 ⋯ a 2 n + a n 2 ⋮ ⋮ ⋱ ⋮ a n 1 + a 1 n a n 2 + a n 2 ⋯ a n k + a n n ] \mathbf{A}+\mathbf{A}^T=\begin{bmatrix} a_{11}+ a_{11} & a_{12}+ a_{21} & \cdots & a_{1n}+ a_{n1} \\ a_{21}+ a_{12} & a_{22}+ a_{22} & \cdots & a_{2n}+ a_{n2} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1}+ a_{1n} & a_{n2}+ a_{n2} & \cdots & a_{nk}+ a_{nn} \\ \end{bmatrix} A+AT= a11+a11a21+a12⋮an1+a1na12+a21a22+a22⋮an2+an2⋯⋯⋱⋯a1n+an1a2n+an2⋮ank+ann -
本节中定义了形状 ( 2 , 3 , 4 ) (2,3,4) (2,3,4) 的张量
X。len(X)的输出结果是什么?len(X), X.shape
-
对于任意形状的张量
X,len(X)是否总是对应于X特定轴的长度?这个轴是什么?答:是的,总是对应轴 0 的长度。
X1 = torch.ones(4) X2 = torch.ones(3, 3) X3 = torch.ones(2, 3, 4)len(X1), len(X2), len(X3)
-
运行
A/A.sum(axis=1),看看会发生什么。请分析一下原因?答:发生报错,因为长度 4 和 5 不匹配。

-
考虑一个具有形状 ( 2 , 3 , 4 ) (2,3,4) (2,3,4) 的张量,在轴 0、1、2 上的求和输出是什么形状?
sum_axis_0 = X3.sum(axis=0) sum_axis_1 = X3.sum(axis=1) sum_axis_2 = X3.sum(axis=2)sum_axis_0.shape, sum_axis_1.shape, sum_axis_2.shape
-
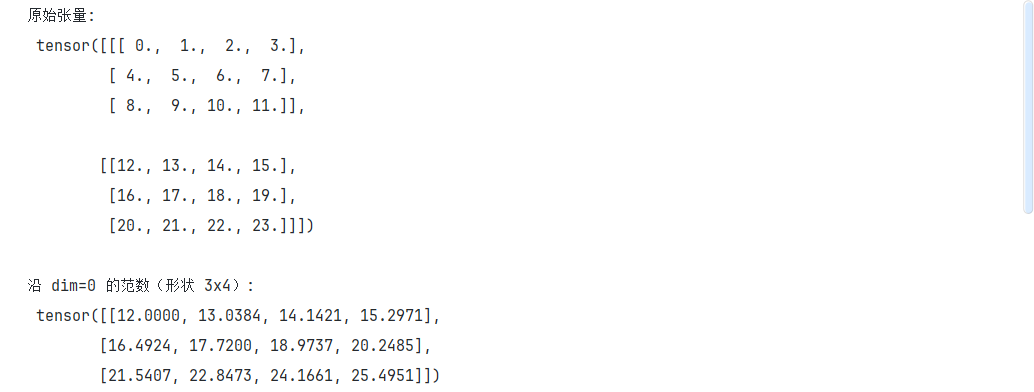
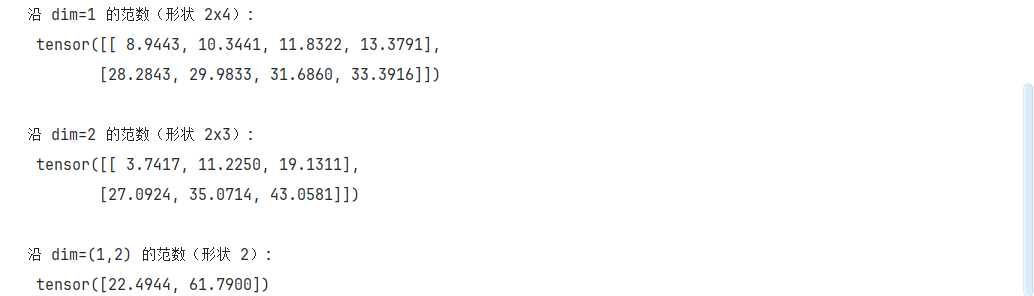
为
linalg.norm函数提供 3 个或更多轴的张量,并观察其输出。对于任意形状的张量这个函数计算得到什么?# 创建一个 3D 张量(形状:2x3x4) x = torch.arange(24, dtype=torch.float32).reshape(2, 3, 4) print("原始张量:\n", x)# 沿不同轴计算 L2 范数 norm_dim0 = torch.linalg.norm(x, dim=0) # 沿第0轴(2消失) norm_dim1 = torch.linalg.norm(x, dim=1) # 沿第1轴(3消失) norm_dim2 = torch.linalg.norm(x, dim=2) # 沿第2轴(4消失) norm_dims = torch.linalg.norm(x, dim=(1, 2)) # 沿第1和第2轴(3和4消失)print("\n沿 dim=0 的范数(形状 3x4):\n", norm_dim0) print("\n沿 dim=1 的范数(形状 2x4):\n", norm_dim1) print("\n沿 dim=2 的范数(形状 2x3):\n", norm_dim2) print("\n沿 dim=(1,2) 的范数(形状 2):\n", norm_dims)