最近在学习HLS语言,所以就自己摸索尝试了用HLS实现了图像二值化,把这个内容总结一下,分享出来。
首先打开HLS,然后新建一个Project,之后再在Source栏点击右键,选择New File...,创建名为pixelBinary.cpp和pixelBinary.h这两个文件。
这个是pixelBinary.cpp文件的内容:
#include "pixelBinary.h"
#include <stdio.h>
#include <iostream>using namespace std;void hls::pixelBinary(GRAY_IMAGE &src, GRAY_IMAGE &dst)
{uchar pixelValue;GRAY_PIXEL src_data;GRAY_PIXEL dst_data;LOOP_ROW:for(int idxRow = 0; idxRow < IMG_HEIGHT; idxRow++){LOOP_COL:for(int idxCol = 0; idxCol < IMG_WIDTH; idxCol++){#pragma HLS PIPELINE II=1src >> src_data;pixelValue = src_data.val[0];dst_data.val[0] = pixelValue > 128 ? 255 : 0;dst << dst_data;}}
}void hlsMain(AXI_STREAM& src_axi, AXI_STREAM& dst_axi)
{#pragma HLS INTERFACE axis port=src_axi bundle=INPUT_STREAM#pragma HLS INTERFACE axis port=dst_axi bundle=OUTPUT_STREAMGRAY_IMAGE img_src;GRAY_IMAGE img_dst;#pragma HLS dataflowhls::AXIvideo2Mat(src_axi,img_src);hls::pixelBinary(img_src,img_dst);hls::Mat2AXIvideo(img_dst,dst_axi);
}
这个是pixelBinary.h文件的内容:
#ifndef _PIXELBINARY_H_
#define _PIXELBINARY_H_#include "hls_video.h"
#include "hls_math.h"
#include "ap_int.h"
#include "ap_fixed.h"// maximum image size
#define IMG_WIDTH 184
#define IMG_HEIGHT 273// I/O Image Settings
#define INPUT_IMAGE "input_image.png"
#define OUTPUT_IMAGE "output_image.png"// typedef video library core structures
typedef unsigned char uchar;
typedef hls::stream<ap_axiu<8,1,1,1> > AXI_STREAM;
typedef hls::Mat<IMG_HEIGHT, IMG_WIDTH, HLS_8UC1> GRAY_IMAGE;
typedef hls::Scalar<1, uchar> GRAY_PIXEL;// typedef HLS namespace
namespace hls
{void pixelBinary(GRAY_IMAGE &src, GRAY_IMAGE &dst);
}//top level function for HW synthesis
void hlsMain(AXI_STREAM& src_axi, AXI_STREAM& dst_axi);#endif
有了这两个文件之后,就可以进行综合了,这里首先要进行顶层函数定义,Project -> Project Settings -> Synthesis -> 在Top Function那里选择hlsMain,点击OK进行确定。然后点击HLS界面的C Synthesis,如下是综合完的结果。
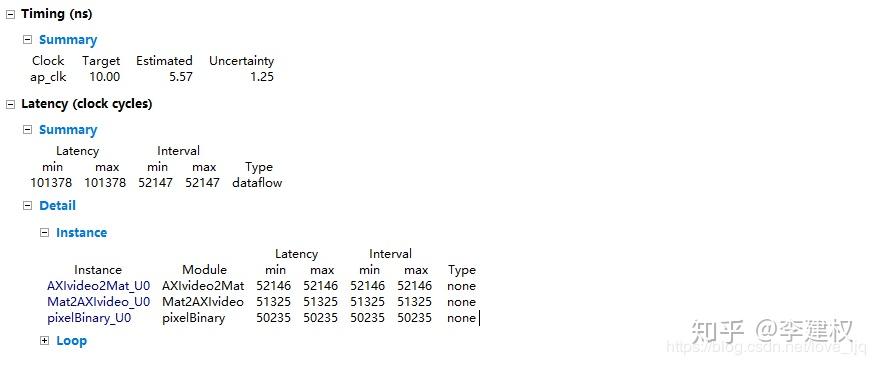
从综合结果可知,pixelBinary的Latency和Interval的值是一样的,都是50235,我们的图片尺寸是184*273 = 50232,Latency和Interval的值比图片像素数多3,关于Latency和Interval具体的含义,我还是没有很明白,这两个值到底是怎么来进行计算的,等弄明白了再来分享。
这是一个综合的结果,也就是把我们的HLS代码综合成了Verilog或者VHDL代码了,你再solution下面的syn文件夹下就可以看到生成的Verilog或者VHDL代码了。
然后接下去是仿真,在TestBench下新建文件,文件名为testbench.cpp,代码为:
#include "iostream"
#include "hls_opencv.h"
#include "pixelBinary.h"using namespace std;
using namespace cv;int main()
{//获取图像数据IplImage* src = cvLoadImage(INPUT_IMAGE,CV_LOAD_IMAGE_GRAYSCALE);//获取仿真图片并直接转为灰度图像IplImage* dst = cvCreateImage(cvGetSize(src), src->depth, src->nChannels);AXI_STREAM src_axi, dst_axi;IplImage2AXIvideo(src, src_axi);hlsMain(src_axi, dst_axi);AXIvideo2IplImage(dst_axi, dst);cvSaveImage(OUTPUT_IMAGE,dst);//释放内存cvReleaseImage(&src);cvReleaseImage(&dst);return 0;
}
这个仿真代码的意思就是读取图像,然后进行处理,并将处理完的结果输出,为了能够仿真,需要在TestBench下添加图像文件,图像文件名为input_image.png,最后会输出output_image.png这么一个图像。如下分别为输入图像数据和输出图像数据,最终生成的图像数据在 .\solution_pixelBinary\sim\wrapc文件夹下


但其实呢,我觉得这样的testbench并不好,看过Example里的TestBench,写法都是Software的结果和Hardware的结果进行对比,如果能对上,就说明写的代码没问题,不过图像处理的话,直接看处理后的图像差不多也行。
![[ 内网渗透实战篇-1 ] 单域环境搭建与安装域环境判断域控定位CS插件装载CS上线](https://i-blog.csdnimg.cn/direct/2e0ea952d49e4d9ea8903b5f1bd56e90.png)