摘要:单发超快光场成像技术能够在更广泛的条件下表征瞬态事件,为探索不可重复和难以再现的超快现象打开了大门,是探索未知领域必不可少的工具,具有巨大的科学技术应用价值。介绍近年来单发超快光场成像技术的研究进展,包括典型代表技术的工作原理、技术特点、应用、优势和局限性。首先综述主动式探测类方法,介绍5小类共15种代表性技术,然后简要介绍被动式探测类方法,最后归纳总结各类单发超快光场成像技术的适用场景及存在的问题,并展望了其未来可能的发展方向。
关键词:超快成像;单发;超快现象;主动式探测;时序映射
1引言
超快现象广泛存在于自然世界和科学技术研究中,反映了物理[1-3]、化学[4-5]和生物学[6]中许多重要的 基本机制。超快现象一般发生在纳秒到飞秒时间尺度的二维空间中,超快光学成像技术可以实现瞬态演化过程的二维可视化观测,是研究超快动力学的重要工具,一直受到科学技术领域研究人员的广泛关注[7]。针对高度可重复的超快现象,通常采用经典的泵浦-探针方法捕获瞬态事件的动力学演化过程,探索潜在的影响机制[8-9]。然而,很多超快现象要么是不可重复的,要么是难以再现的,例如超强激光成丝[10-12]、元件损伤[13-15]、不可逆化学反应[4-5]等,在这些情况下,泵浦-探针方法难以发挥作用。此外,针对重复频率低或发次与发次间有显著变化的瞬态事件,如惯性约束聚变点火[1-3,16]、高密度等离子体演化[17-19]等,泵浦-探针类方法不仅测量效率低,而且不可能获得准确的动力学演化信息。泵浦-探针方法仅限于可重复性条件下的统计研究。
为了克服泵浦-探针方法的局限性,近年来研究人员提出了一系列单发超快光场成像技术[7,20]。单发超快光场成像技术指仅通过单次曝光就能获取整个瞬态事件的多幅时空分辨信息的技术,其中,“单发”表示单次曝光即可捕获整个瞬态事件,“超快”表示可实现纳秒到飞秒尺度的时间分辨,“光场”指可探测从极紫外到远红外的光谱信息,“成像”表示可获取空间(x,y)维度信息。单发超快光场成像技术能够在更广泛、更任意的条件下表征瞬态事件,开启了研究不可重复和难以再现超快现象的大门,已成为理解基础科学技术问题和实现高精度高效率测量必不可少的工具。单发超快光场成像领域的蓬勃发展得益于超短激光系统[21-22]、超快探测器[23-24]、新的计算理论框架[25-26]的飞速进步。首先,超短激光系统产生的飞秒脉宽激光提供了杰出的时间切片能力,高带宽光谱为脉冲整形技术提供了光信标编码载体,高脉冲能量为单次曝光提供了足够的光子数,从而实现高信噪比测量。其次,新的器件结构和先进的制造技术不断促进超快探测器性能的提升,克服了传统探测器在板载存储和读出速度方面的限制,实现了更快的快门响应和更高的灵敏度。最后,以超快压缩成像为代表的先进光学计算理论的提出突破了传统光学成像系统的硬件限制,不断刷新时间分辨极限。根据照明方式的不同,单发超快光场成像技术可分为主动式探测和被动式探测两类[7]。主动式探测类方法对子脉冲串进行编码标记,根据子脉冲携带光信标方式的不同,可分为空间分割、角度复用、时间波长映射和空间频率复用等,典型技术包括单发飞秒瞬态光学偏振测定术[27]、时序全光摄影术[28-29]、单发时频复用全息成像术[30]和多次曝光频域识别术[31]等。被动式探测类方法不对光信息进行直接调制,仅利用接收探测器记录时变的二维图像,可以进一步分为探测器直接探测类方法[23]和图像重建类方法[25-26]。
本文介绍并讨论了近年来单发超快光场成像技术的研究进展,包括典型代表技术的工作原理、技术特点、应用、优势和局限性。首先介绍主动式探测类方法,重点包括5小类总共15种代表性技术,然后简要介绍被动式探测类方法,最后归纳总结各类单发超快光场成像技术的适用场景和存在的问题,并对其发展趋势进行展望。
2主动式单发超快光场成像技术
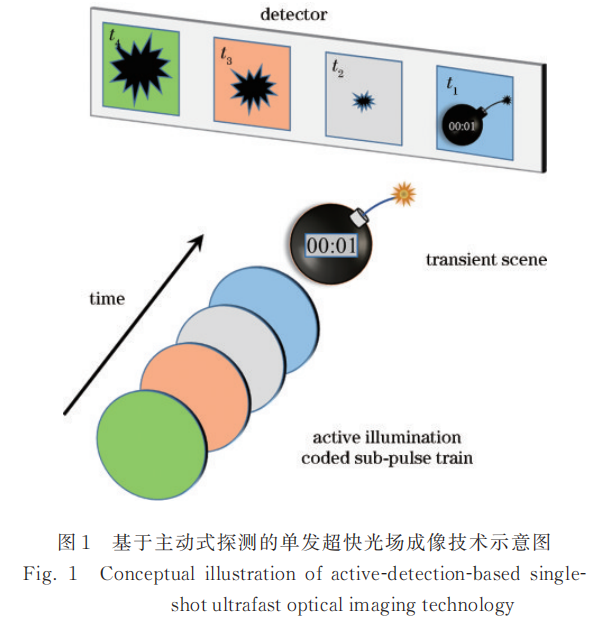
主动式探测方法通常采用超短脉冲串作为探针基元进行瞬态事件测量。如图1所示,每一个子脉冲被编码一个独特的光信标(以不同的颜色表示不同的光信标),如不同的空间位置、波长、角度、偏振态或空间频率,根据光信标属性,采用特殊设计的检测装置在空间(x,y)或频域空间(fx,fy)分离出不同时刻的二维瞬态场景,进而获得整个瞬态事件的演化过程。本节将介绍空间分割、时间波长映射、角度复用、空间频率复用和光束触发快门5小类单发超快光场成像技术。很多情况下,单发超快光场成像技术不是依靠单一的机制进行编码分离的,这里选取技术中最突出的特征进行分类阐述。
2.1空间分割类
空间分割类方法的基本原理是:对超短探针脉冲进行空间和时序编码,不同时刻的子脉冲将瞬态事件投影到探测器的不同空间区域,进而记录瞬态演化信息(x,y,t)。很多单发超快光场成像技术利用了空间分割思路,这里重点介绍单发飞秒瞬态光学偏振测定术(SS-FTOP)[27]和数字全息光飞行记录术(DLIF)[32-33]。
基于空间分割思路,Wang等[27]结合光学偏振技术和阶梯光学元件开发出SS-FTOP,实现了4分幅超快成像,如图2所示。钛宝石超短激光器产生的中心波长为800nm、脉宽为65fs的激光脉冲由分束器分为泵浦光和探针光。泵浦光经光学延迟调节后,其偏振态经半波片转为垂直偏振。利用焦距为100mm的透镜将泵浦光聚焦到10mm厚的熔石英克尔介质中,其焦点距离介质输入面约1mm。为避免泵浦光背景散射影响,采用BBO晶体将探针光倍频到400nm。随后,探针光入射到4台阶阶梯光学元件上,阶梯元件将探针光分成空间区域不同、时序不同的4路子探针光,即利用阶梯元件对探针光完成了空间时序编码。4路子探针光垂直于泵浦光方向入射到由偏振片P1、熔石英介质(FS)和偏振片P2组成的克尔门上。偏振片P1偏振方向与偏振片P2相垂直,正常情况下无光到达探测器(CCD)。然而,泵浦光入射熔石英克尔介质引起的双折射(瞬态偏振变化)为探针光的传输提供了途径,使得部分探针光可以传输到CCD上。为记录瞬态图像,每一台阶产生1帧图像,须实现探针光和泵浦光在克尔介质中的时序同步。特殊设计的阶梯元件台阶宽度为0.54mm,其对400nm的探针光产生的时间延迟约0.96ps,这一时间延迟须与800nm泵浦光在熔石英中的传播时间一致,因此台阶高度设计为0.2mm。如图2(b)所示,利用SS-FTOP对飞秒脉冲在熔石英介质中的传输过程进行了连续4帧的超快成像,观察到了脉冲能量抖动引起的不同发次间泵浦光传输轮廓的演化。
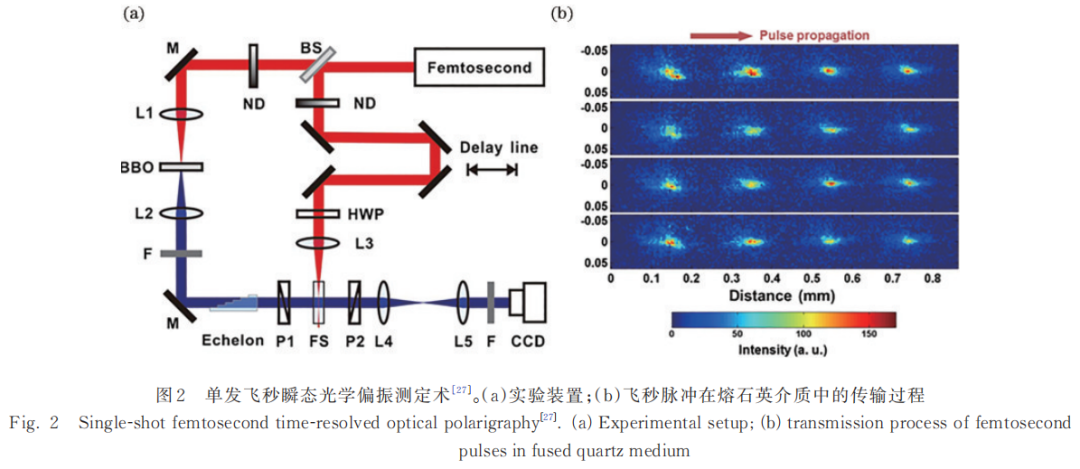
由于熔石英介质的超快响应,SS-FTOP的时间分辨力主要受限于探针光脉宽和泵浦光的横向尺寸(~276fs)。随着阿秒激光科学的进步,SS-FTOP可以充分利用超短激光脉宽实现更快的时间分辨。然而,SS-FTOP也有局限性。SS-FTOP利用阶梯元件进行空间时序编码,考虑到阶梯元件规格,该方法采样帧数有限,时间量程较短,并且帧数与成像视场相冲突,空间分辨力较弱。
DLIF可以实现激光脉冲自身传播过程的成像记录,也是一种典型的空间分割类单发超快光场成像技术[32]。DLIF的基本原理是:倾斜参考光(扫掠光)的脉冲前沿与不同时刻的物光(散射光)全息干涉记录在不同的空间区域,生成瞬态事件的时间分辨图像。如图3(a)所示,中心波长为522nm、脉宽为178fs的超短激光脉冲由分束器分为照明光和参考光。照明光由透镜组准直扩束后,入射到装有明胶果冻的透明容器中,从明胶果冻中出射的照明光携带有三维散射信息,称为物光。另一路参考光经透镜组准直扩束后,入射到相位衍射光栅上,衍射光栅用来增加记录时间量程。从衍射光栅出射的参考光作为倾斜参考光。只有物光与参考光的光程差小于相干长度时,两束光脉冲才满足干涉条件完成全息记录。在记录过程中,由于参考光倾斜入射到图像传感器,参考光的脉冲前沿与物光相交于传感器横向的不同空间区域。换言之,图像传感器不同的空间区域记录了不同时刻的图像信息。最后,从获得的全息图中数字重建时间分辨图像。图3(b)显示的是激光脉冲在三维散射介质中传播的运动过程,利用衍射光栅增加了总记录时间量程,采样帧数为9帧,图像间的时间分辨为6.7ps,总时间量程达59ps。DLIF的时间分辨力主要由视场、入射角和相干长度决定。
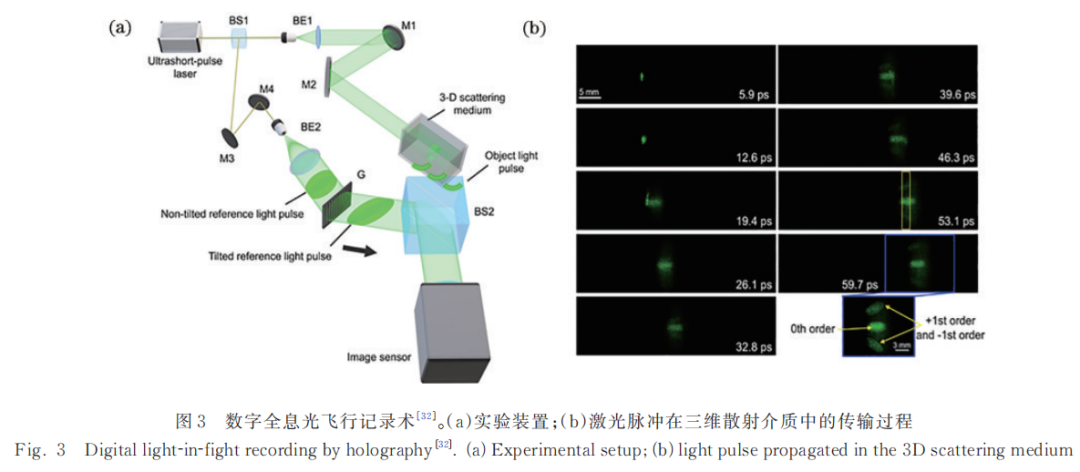
与SS-FTOP类似,DLIF可以充分利用超短脉宽激光实现飞秒级的时间分辨力。DLIF也有采样帧数有限且与成像视场成反比的缺陷,但是DLIF的视场在重建过程中是可调谐的,可以适当增加采样帧数。理论上,只要光源具备足够长的相干时间和足够大的散射角,DLIF可以实现复杂超快现象的捕获。需指出的是,DLIF是基于干涉原理的,仅可对相干光成像,不能用于观察非相干照明条件下的瞬态事件。
2.2时间波长映射类
时间波长映射类方法主要利用啁啾超短脉冲的宽光谱作为编码载体,不同光谱成分与时间延迟间具有线性映射关系,啁啾脉冲光探测瞬态事件后,不同光谱成分的子脉冲光携带不同时刻的二维场景信息(x,y);在检测端,利用色散光学元件分离出不同时刻的探针光,获得瞬态演化信息(x,y,t)。时间波长映射思想广泛存在于各类单发超快成像技术中,这里主要介绍3种方法,包括时序全光摄影术(STAMP)[28-29,34-35]、瞬态光栅角色散分离术(ADSTG)[36]和超快全光固态分幅相机(UASFC)[37-38]。
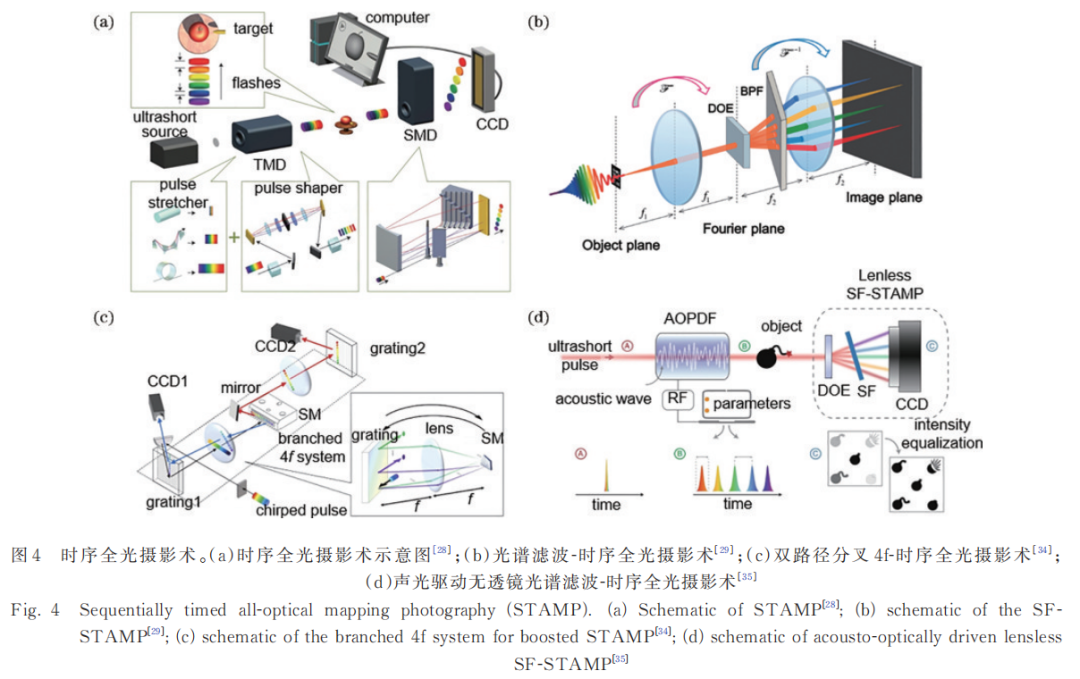
东京大学的Nakagawa等[28]开创了基于时间波长映射的STAMP,其基本原理是基于波长编码子脉冲串,利用啁啾光和光栅形成时空扫描。如图4(a)所示,STAMP装置主要由超短光源、时间映射模块(TMD)、空间映射模块(SMD)及图像传感器等组成。飞秒量级的探针光经玻璃棒、棱镜对和光纤后,由于色散作用脉冲展宽到纳秒量级。基于空间光调制器(SLM)的脉冲整形器将具有连续光谱分布的纳秒探针光截断为光谱分离的子探针脉冲串。由于输入脉冲具有啁啾特性,不同光谱成分与时间延迟间具有线性映射关系,因此光谱分离的子探针脉冲串在时间上也是分离的。子探针脉冲串照射瞬态事件,随后被由衍射光栅和潜望镜阵列组成的空间映射模块色散分离到图像传感器上不同的区域。通过解构子探针脉冲串的时空分布,反演出瞬态事件。STAMP可实现时间分辨为190fs、空间分辨为450pixel×450pixel的6分幅成像,实验中采用该技术研究了强激光诱导产生等离子体和晶格振动波传播等瞬态事件。
STAMP实验装置构造复杂,其中脉冲整形和光谱色散组件较为繁琐。为简化系统设计,Suzuki等[29]和Fan等[39]基于衍射光学元件(DOE)分束和带通滤波的方法发展出光谱滤波-时序全光摄影术(SF-STAMP)。如图4(b)所示,SF-STAMP利用DOE在空间上复制并分离出25路子探针光,不同角度出射的子探针光经窄带滤波器(BPF)得到滤波选通,成为光谱分离的子探针光。由于输入脉冲的啁啾特性,不同光谱成分的子探针光携带不同时刻的瞬态事件信息。SF-STAMP装置简洁灵活,极大地简化了系统结构,拓展了序列深度,实现了时间分辨为133fs的25分幅成像。此外,Saiki等[34]通过在傅里叶频谱面放置阵列切面反射镜构建双路径分叉4f系统,对传统的STAMP装置进行升级,在保持空间分辨(450pixel×450pixel)不变的情况下将序列深度增加到18幅,如图4(c)所示。其核心思路是通过两组共18个具有不同倾斜角度的切面反射镜将探针光分解为不同路径的子探针光,进而由2个CCD接收成像。为弥补STAMP分幅图像间强度的差异,2022年Touil等[35]结合声光可编程色散滤波器技术(AOPDF)、数字同轴全息技术(DIH)及SF-STAMP,发展出声光驱动无透镜光谱滤波-时序全光摄影术(ADPDF-SF-STAMP),实现了5分幅等幅度成像,提升了STAMP的实用性,如图4(d)所示。AOPDF可以实现光谱和时间域的相位、幅度整形,因此可以独立控制曝光时间、帧速率和帧强度。DIH技术可以实现无透镜操作,成像系统更加简单,同时可在宽景深上重建和定位物体。该方案简便灵活,实验中利用该技术分别在皮秒时间尺度上对光学克尔门进行成像和在纳秒时间尺度上对激光诱导烧蚀等进行成像。
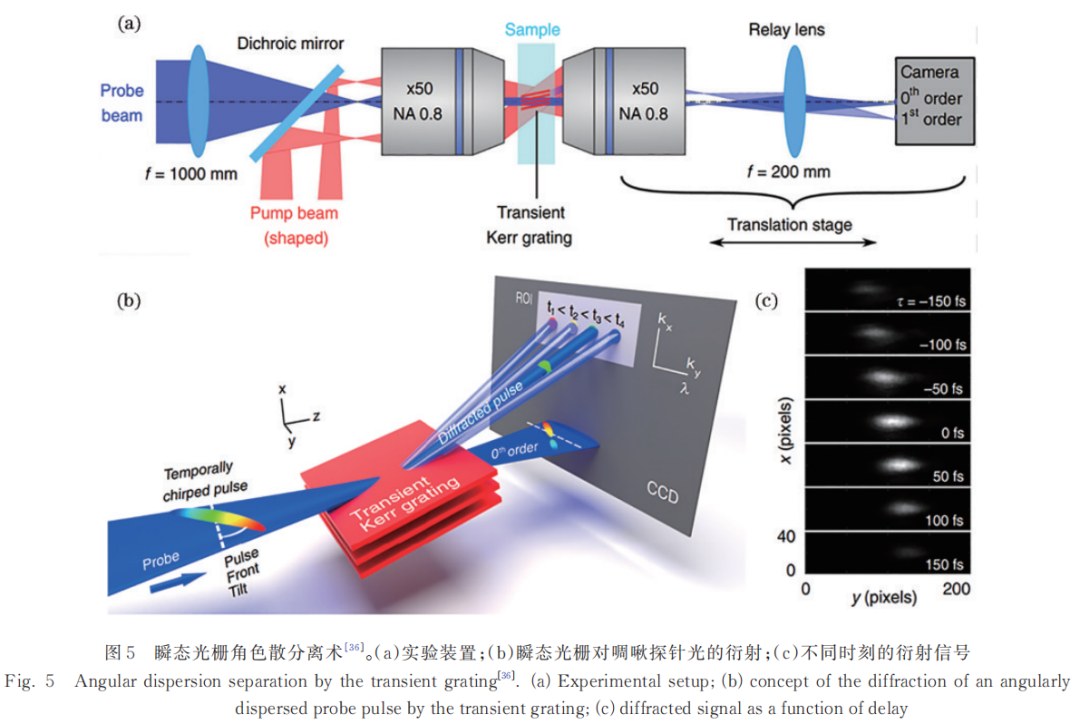
2021年,Xie等[36]利用瞬态光栅的角度和波长选择性实现了对微弱飞秒探针脉冲的时空分辨原位表征。两束泵浦光在介质中干涉形成瞬态光栅(体光栅),探针光以布拉格角入射时衍射效率最高,一级衍射信号出现在相位匹配方向上(k1−k2+k3),即瞬态光栅具有角度和波长选择性[40-41]。啁啾探针光的光谱成分与时间延迟具有线性映射关系,啁啾探针光入射到由两束泵浦光激发的瞬态光栅后将从不同的空间角度衍射,在远场不同空间位置可以收集到不同时刻的光场信息。如图5(a)所示,掺钛蓝宝石超短激光器发出的中心波长为790nm、脉宽为50fs的激光脉冲由分束器分为泵浦光和探针光。利用SLM整形生成2束子泵浦光,通过高倍显微物镜,2束子泵浦光在克尔介质干涉形成微米尺度(10~30μm)的瞬态光栅。啁啾探针光入射到瞬态光栅上,为满足相位匹配条件,含有不同光谱成分的啁啾探针光将从不同的空间角度衍射,经高倍显微物镜和中继透镜传输成像在CCD相机上。由于空间角色散,不同时刻的光场信息在空间中分离,衍射信号提供了对探针光的时空分辨原位表征。图5(b)显示了啁啾探针光经瞬态光栅后不同时刻光场的空间分离形态,这里瞬态光栅可以看作是一个具备时间选通作用的色散元件。图5(c)为实验获得的不同时间延迟下的衍射信号。利用瞬态光栅的波长和角度选择性实现对啁啾探针光的时空表征是一种非常巧妙的方法,但是这种方法具有空间分辨(100pixel×100pixel)有限的缺陷。
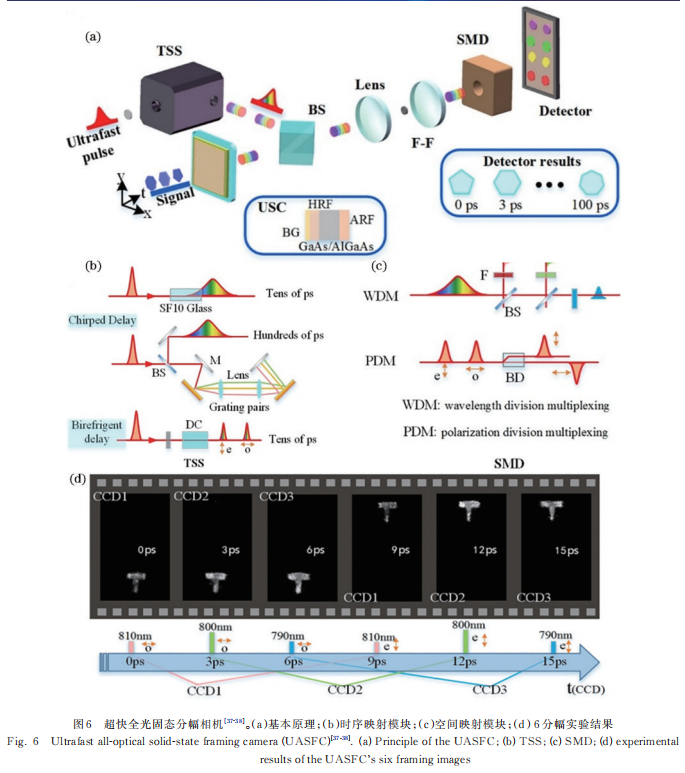
Gao等[37-38]将时间-波长映射拓展为时间-波长偏振映射,基于超快半导体芯片的瞬态光折变效应研制出超快全光固态分幅相机(UASFC),实现了时间分辨为3ps、空间分辨为30lp/mm的6分幅超快成像。如图6(a)所示,UASFC主要由超快半导体芯片(USC)、时序映射模块(TSS)和空间映射模块(SMD)等组成。USC将信号光信息传递到探针光上,TSS对探针光的光谱域和偏振域进行时序编码,SMD利用波分复用和偏振分复用技术将探针光时序映射到不同的空间区域。中心波长为800nm、脉宽为50fs的超短脉冲由分束器分成信号光和探针光。首先,探针光入射到TSS上,由SF10色散玻璃和光栅对将脉宽展宽至数十ps,由TiO2延迟晶体在探针光正交偏振间引入数十ps的相对延迟,使探针光的总记录时间增加到100ps量级。信号光经BBO倍频后入射到USC上产生瞬态相位光栅效应,经色散展宽和偏振延时分离的探针光入射到瞬态相位光栅上附加相位信息。然后,利用4f系统对探针光进行空间滤波,将探针光的相位变化转为振幅变化。SMD由光束位移器(BD)、分束器和3个不同波段的窄带滤波器组成,其中BD在空间上分离出2个正交偏振的探针光,分束器和窄带滤波器将不同光谱成分的探针光成像到不同的CCD相机或单个CCD相机的不同空间区域。也就是说,波分复用(时间-波长映射)和偏振分复用(时间-偏振映射)构成了SMD,其将探针光时序映射到不同的空间区域。图6(d)是时间分辨为3ps的6分幅超快成像结果,实验中采用了3组滤波器和CCD相机,适当添加CCD相机和滤波器可增加采样帧数。UASFC可实现光场演化行为的动态测量,其时间分辨由半导体的响应时间决定,采用GaAs/AlGaAs多量子阱可实现2.5ps的最小时间分辨[38]。结合前面所述的SF-STAMP技术对UASFC进行拓展,可实现数十甚至上百帧的分幅数。
时间波长映射类方法可实现百飞秒量级时间分辨的多帧超快成像,但是所获取的多幅图不在同一光谱基准,影响图像解读。此外,时间波长映射将初始啁啾超短脉冲编码为时间和光谱上分离的子脉冲串,子脉冲是初始飞秒脉冲完整光谱的一部分,由时间带宽积可知,窄脉宽与窄光谱不可兼得,导致时间分辨小于初始超短激光脉宽。
2.3角度复用类
角度复用类方法以不同的角度探测记录瞬态事件,并结合其他技术解析出动态演化场景。目前主要有两种角度复用单发光学超快成像方法。第一种方法采用角度编码和时间分离的超短脉冲串探测瞬态事件,干涉记录形成角度复用全息图,全息图经频谱域处理得到瞬态事件,典型的代表技术是单发时频复用全息成像术(SS-TSFM)[30]。第二种方法采用较长的激光脉冲记录整个瞬态事件的发生过程,不同角度的子脉冲同时探测瞬态事件,每个子脉冲从不同的角度记录瞬态事件的投影。这里角度复用是为了实现计算层析重建,而不是时序编码。其时间分辨是通过时间波长映射和频域全息技术实现的。第二种方法典型的代表技术是单发频域层析术(SS-FDT)[42-43]。
2020年,Moon等[30]利用SLM写入二维光栅的方式编码产生了多束不同角度的参考光,参考光经阶梯元件时间延迟后与携带待测信息的色散展宽探针光干涉记录,形成角度复用全息图。解析全息图,该方式实现了14分幅超快光学成像。如图7所示,中心波长为800nm、脉宽为91fs的超短激光脉冲由多个分束器分为参考光、物光和探针光,分别由红色、紫色和青色标记。在SLM上写入二维衍射光栅图样,将参考光分束成不同角度传播的子参考光。在L1焦平面上放置不同厚度的阶梯元件,分别对每束子参考光进行光程延迟,相邻脉冲之间的时间延迟设置为210fs。14束子参考光经透镜L2、分束器BS2入射到相机。为了使系统紧凑简单,这里仅采用1束时间展宽的探针光而不是一系列超短脉冲串覆盖整个瞬态事件演化过程。91fs的探针光2次经过5mm厚的SF11玻璃,色散展宽至2.3ps。物光泵浦激发样品后,色散展宽的探针光辐照样品,携带瞬态事件信息后经OL等透镜成像到相机中。探针光与不同角度入射的参考光在相机中离轴干涉记录,形成时间和空间频域复用的全息图。在全息图中,不同角度的干涉条纹形成网状干涉图,在频谱面形成分离的空间频率边带,每一组边带对应不同时刻的图像信息,频域滤波后可获得每组条纹的复振幅信息。
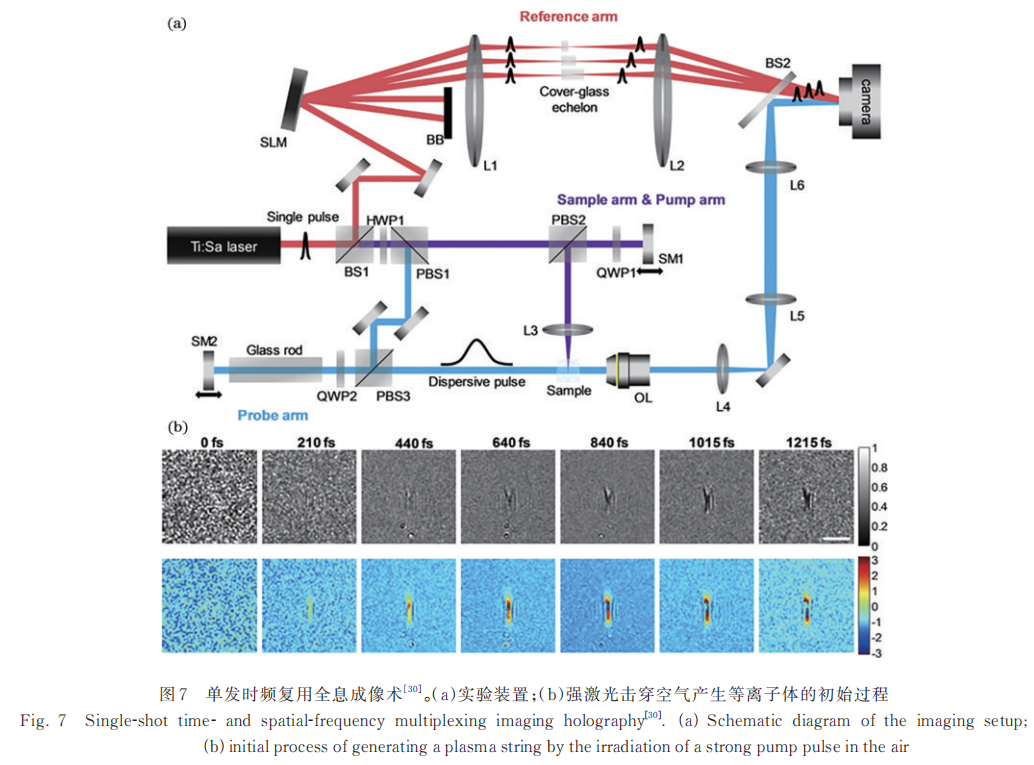
实验中,采用SS-TSFM演示了光在散射介质中的传播、激光玻璃烧蚀、图7(b)所示强激光击穿空气产生等离子体等瞬态事件的超快成像。SS-TSFM利用SLM和定制阶梯光学元件构成的独特光学布局突破了角度复用类方法采样帧数较少的缺陷(3~4帧),实现了时间分辨为210fs的14帧成像[44]。如果降低单帧图像空间分辨力,可增加采样帧数,SS-TSFM最高可实现24帧分幅成像,采样帧数的进一步提升受限于视场、系统放大率和物镜的数值孔径等几何参量。SS-TSFM采用全息干涉的记录方式可以获得瞬态事件演化的复振幅信息,有利于完整分析超快演化现象。SS-TSFM的时间分辨力受限于激光脉宽,采用更短波长的超快光源可实现更高的时间分辨,但是由于探针光色散展宽和阶梯元件规格限制,测量的时间量程有限。
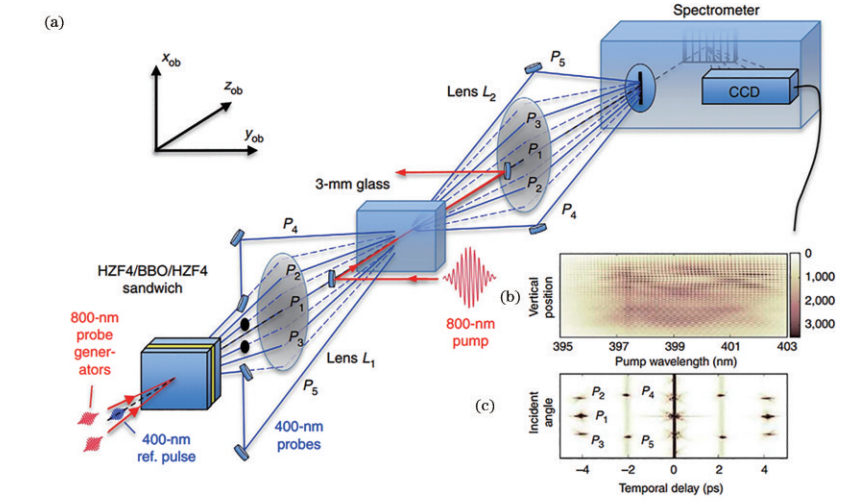
结合角度复用和时间波长映射等方法,Li等[42-43]提出了一种能实现光场本身传输过程成像的单发频域层析术。如图8所示,两束同源的中心波长为800nm、脉宽为30fs的探针光以小角度交叉入射到由HZF4/BBO/HZF4组成的三明治结构中。探针光穿过第一块5mm厚的HZF4后,通过级联四波混频产生了8束波长为800nm的子脉冲。厚度为500μm的I类BBO将探针光倍频到400nm。第二块15mm厚的HZF4玻璃将探针光展宽到600fs。实验中选择5个不同角度的探针子脉冲,透镜L1将第一块HZF4玻璃成像在3mm厚的熔石英样品上,通过成像自动实现多路探针光在样品上的时空重合。由于泵浦光激发样品产生瞬态折射率结构,不同角度入射的探针光穿过样品将携带有不同方位的相位条纹信息。在这些探针光到达之前,从泵浦光中直接分离出的1束400nm的啁啾参考光穿过样品,记录相位参考。5路探针光和1束参考光同时入射到成像光谱仪的狭缝入口,在光谱仪内干涉,形成栅格状的频域全息图,如图8(b)所示。该全息图在单次拍摄中记录了5路探针光的相位调制信息,记录了瞬态事件的5个投影视图。
图像重建分为3步。首先,采用二维傅里叶变换获得全息图的空间频域信息,在空间频域,不同探针光因入射角度差异和时间延迟不同而分开,如图8(c)所示。其次,通过加窗、移频和傅里叶逆变换,获得不同探针光携带的折射率演化相位条纹信息,如图8(d)所示。最后,采用计算层析算法(如代数重建术)恢复出瞬态折射率演化结构。重建瞬态场景的时间分辨约为2.4ps,采样帧数为60帧,空间分辨为128pixel×128pixel。图8(e)显示了熔石英介质在不同强度泵浦光激励下引起的非线性折射率演化。当泵浦光强度较低时,非线性折射率改变较小。当泵浦光强(0.7μJ)超过自聚焦阈值时,非线性折射率变化较大,脉冲在7.4ps处产生自聚焦塌缩,在9.8ps发生自聚焦成丝,从主光斑分离出旁瓣,在12.2ps附近光束中心出现孔洞,这表明强激光激发的等离子体诱导产生了一个负折射率变化,局部抵消了自聚焦效应产生的正折射率。
单发频域层析术中角度复用是为了实现计算层析重建,而不是时序编码。其时间分辨是通过时间波长映射和频域全息实现的。啁啾探针光和啁啾参考光进入成像光谱仪,在波长方向展开并干涉,形成频域全息图,通过啁啾脉冲的时间-波长映射关系得到时间分辨的相位条纹投影。单发频域层析术利用层析技术可获得较大的采样帧数,利用频域全息可记录复振幅信息,然而稀疏的角度采样将形成伪影,降低图像重建质量,进而限制了时空分辨能力。很多单发超快光场成像技术不是依靠单一的机制进行编码分离的,从上述内容可以看出,角度复用通常与全息等技术结合实现超快成像,角度在这里提供了一个维度以承载编码。
2.4空间频率复用类
空间频率复用类方法的基本原理是:将不同的空间频率载波附加到具备不同时间延迟的超短探针脉冲串上,编码后的超短探针脉冲串照射瞬态事件后叠加成像到探测器上,在空间频域上不同的探针脉冲串因携带的载频不同而分离,经频域处理恢复瞬态事件(x,y,t)。目前主要有两种途径对超短探针脉冲串加载空间载频,即光栅调制附加载频和干涉附加载频。本小节分别介绍基于光栅调制附加载频的多次曝光频域识别术(FRAME)[31,45-49]、多路复用结构光捕获术 (MUSIC)[50-52]和基于干涉附加载频的时间分辨全息偏振显微术(THPM)[53]3种技术,以期对这类方法有相对完整的认识。
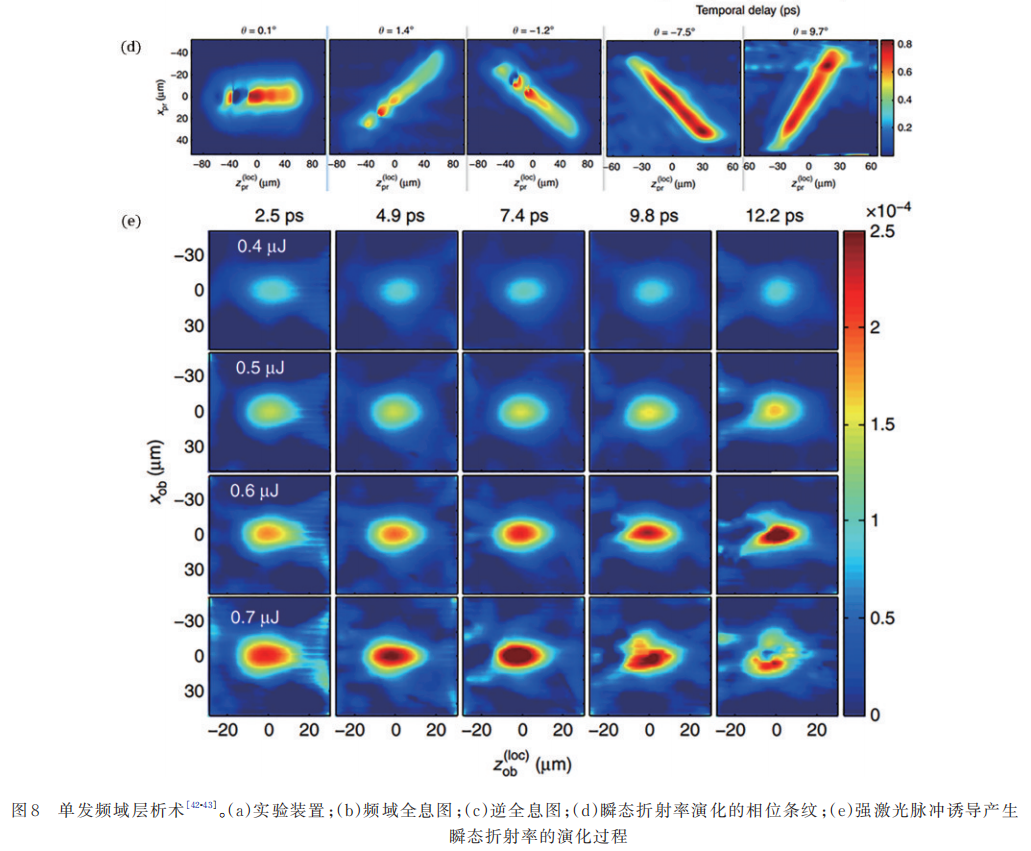
2017年,Ehn等[31]提出了基于空间频率复用的多次曝光频域识别术(FRAME),实现了时间分辨200fs的4分幅成像测量,其核心原理是前级利用光栅调制编码超短探针光和后级空间频域识别解析。如图9(a)所示,中心波长为800nm、脉宽为125fs的超短探针光经系列反射镜、分束器分为时序不同的4子束,子束探针光入射到不同方位的朗奇光栅上。利用周期相同(20lp/mm)但方位不同的朗奇光栅分别对4子束探针光进行强度调制,然后4子束探针光经合束器同轴合束,经焦距为150mm的成像透镜辐照瞬态事件,最后将其叠加成像到CCD上。虽然CCD上采集的图像在空间中是混叠的,如图9(c)和图9(e)所示,无法区别,但由于前级光栅编码,不同方位的空间载频将不同时刻的子束探针光在空间频域中分离,如图9(b)和图9(d)所示,没有任何串扰,经移频、滤波、傅里叶逆变换等频率解析操作可复原得到不同时刻的瞬态图像。图9(f)为采用FRAME捕获的飞秒脉冲在CS2介质中的传输过程,其时间分辨为200fs,空间分辨为1002pixel×1004pixel,可以清晰地观察到飞秒脉冲的纵向演化过程。FRAME装置是基于像传递原理的,各子束光栅放置的位置与CCD像面的距离相等,消除了宽带啁啾光带来的色散影响,不受特定波长的限制,因此具备全光谱成像兼容能力。FRAME可拓展性强,采用不同脉宽的光源作为探针光,可在不同时间尺度(as~ms)成像,采用低噪声高敏感CCD可进一步提升成像质量[46-47,49,54]。
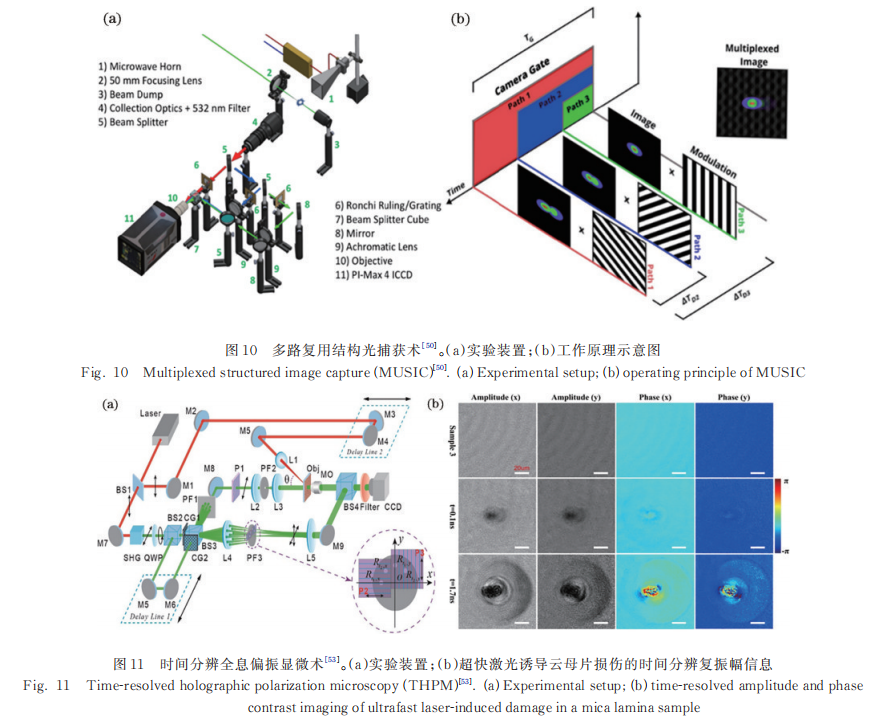
2018年,Gragston等[50]基于空间频率复用原理提出了多路复用结构光捕获术(MUSIC),实现了时间分辨为1ns的3分幅成像。MUSIC利用空间频率移动对瞬态事件的时间演化过程进行编码,每一个频率移动对应一个独特的时间,经频域解析获得不同时刻的场景图像。不同于FRAME,MUSIC不需要使用超短脉冲作为探针光,其时间分辨的实现是依靠各子束的延迟时间不同和窄门宽选通相机的。如图10所示,MUSIC装置主要由光程延迟、光栅编码和时间选通3部分组成。照明光辐照瞬态事件,探针光对瞬态事件进行成像测量。探针光经分束器和反射镜组分为光程不同的3子束,各子束间的光程差为30cm,对应时间延迟约1ns。各子束利用不同方位的朗奇光栅(10lp/mm)进行空间频率编码,同轴合束后进入窄门宽选通相机(PI-Max4ICCD)。PI-Max4ICCD为像增强相机,其最小曝光时间为3ns。3ns门宽的ICCD截断各子束的成像积分时间,第1路记录整个瞬态事件,第2路记录前2/3事件,第3路记录前1/3事件,总时间量程为相机的曝光时间。实验中,利用MUSIC装置观察到了激光诱导电离、相干微波散射等瞬态事件。MUSIC装置利用空间频域解析和窄门宽相机实现了多分幅相机的功能,进一步减小各子束的光程差,并选用更短门宽的CCD实现更高的时间分辨。MUSIC装置不需要依赖超短脉冲作为探针光,装置设计较巧妙,但是需要图像相减才能分离出不同时刻的图像信息,可能存在混叠现象[55]。
Yue等[53]提出了基于干涉附加载频的时间分辨全息偏振显微术(THPM),实现了偏振敏感材料中瞬态事件的超快成像。如图11所示,中心波长为1064nm、脉宽为30ps的超快光源由分束器BS1分为泵浦光和探针光。泵浦光经透镜L1聚焦辐照样品激发瞬态事件,线偏振探针光经KDP晶体倍频后由1/4波片转为左旋圆偏振光。然后,圆偏振探针光经偏振分束器BS2分为2子束,通过延迟线DL1调节2子束的时间延迟。2子束探针光分别经过呈45°排列的二维正交光栅(CG1和CG2)得到空间频率编码,然后由偏振分束器BS3分为物光和参考光。物光光路中,设置PF1针孔滤波器选通光栅衍射的2束零级光,2束物光经与水平方向呈45°放置的偏振片P1后照射由泵浦光激发的瞬态事件。在参考光路中,设置4孔滤波器PF3并在PF3后紧贴放置正交偏振的偏振片P2/P3,如图11(a)右下角所示,其中P2呈水平偏振,P3呈垂直偏振。4孔滤波器PF3和偏振片组分别选通光栅CG1/CG2中的一级衍射中的两组正交偏振光,产生了4束子参考脉冲(Rt1,x,Rt2,x,Rt1,y,Rt2,y),每子束参考脉 冲具有不同的时序和偏振态。最后,呈45°偏振的2束物光和4束参考光经偏振合束器BS4合束后入射到CCD中干涉记录,形成频率复用全息图。实验中,2个探针光之间的时间延迟需要大于单个脉冲的持续时间,因此物光各正交偏振分量只能和来自同一个探针光的参考光的正交偏振分量发生干涉。由于前级二维光栅空间频率编码,物光与4个子束参考光的干涉条纹具有不同的空间频率,在空间频域对全息图进行处理可以复原瞬态事件。图11(b)为超快激光诱导云母片损伤过程的实时成像,在强光辐照数百皮秒后,可以看到冲击波的产生,由于云母片的各向异性,光场振幅和相位发生了不均匀的变化。THPM装置设计巧妙,利用二维光栅复合编码,滤波器小孔和偏振态的优化设计获得了瞬态事件在2个不同时刻正交偏振态下的复振幅信息。相比其他空间频率复用类方法,THPM尤其适合于监测偏振敏感材料中的超快现象,但是目前该技术采样帧数有限。
空间频率复用类的单发超快光场成像技术不受限于特定波长,不依赖于色散,不牺牲超短脉冲的时间分辨力,可以保留探针光的全部光谱信息,因此具备全光谱兼容能力,可以应用到众多激光与物质相互作用现象的分析中。空间载频可以通过光栅强度调制或者干涉调制的形式附加。前者适用于各种类型的超短光源,如纳秒脉冲或LED光源,并且可以拓展到偏振、光谱和焦深等维度,实现多维度复合成像[45-47,56-57]。后者 可以获得瞬态事件的复振幅信息。与空间分割类方法类似,空间频率复用法同样存在采样帧数有限的问题,采样帧数与成像视场或者空间分辨冲突。
2.5光束触发快门类
光束触发快门类方法是利用超短激光脉冲本身的短脉宽作为触发快门去截断瞬态事件的。这类方法原理新奇,构思巧妙,基本上都利用了空间分割的思路,但是该类技术最突出的特征是超短激光本身作为时间快门选通瞬态事件,这里对其进行单独分析以突出其重要性。本小节分别介绍基于并行结构相干快门原理的全光同轴分幅相机(AOCFP)[58-59]和基于非共线光 学参量放大原理的全光超快高时空分辨成像系统(FINCOPA)[60]。
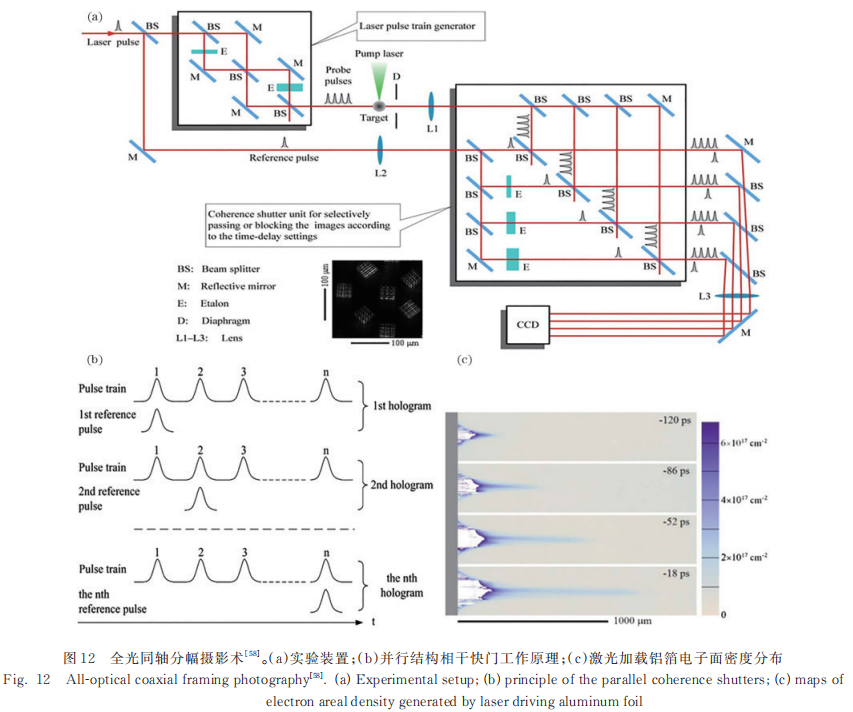
Chen等[58]研制了基于并行结构相干快门原理的全光同轴分幅相机(AOCFP),在同一空间、时间和光谱基准下获得了时间分辨为34ps的4分幅超快成像。如图12所示,AOCFP主要由脉冲串产生单元和并行结构相干快门单元组成,中心波长为527nm、脉宽为10ps的调Q锁模光源经分束器分为探针光和参考光。探针光经系列反射镜、分束器和标准具组成的脉冲串产生单元后转为4束同轴的探针光脉冲串,其中标准具用于调节子束间的时间延迟。探针脉冲串辐照瞬态事件后进入并行结构相干快门单元。在并行结构相干快门单元内,系列分束器将探针脉冲串分成4路沿不同路径传播的子探针脉冲串,同时另一系列分束器将参考光分成4束沿不同路径传播的子参考光。不同路径的子参考光只与子探针脉冲串中的1束在时间上重叠,满足相干条件,从而仅产生与这1束子探针脉冲干涉的图,其余子探针脉冲以非相干本底的形式存在。这里,利用子参考光选通探针光特定时刻的复振幅信息,控制干涉条纹的产生与关闭,子参考光起到相干快门的作用。不同时序的子参考光选通不同的子探针光,到达同一个CCD(尺寸为49mm×36.8mm,分辨率为3735dpi)的不同区域。通过并行结构相干快门和空间分割,每一个干涉全息图在空间上和时间上都是独立的。实验中,利用AOCFP观察了激光击穿空气和激光加载铝箔两种超快物理过程。AOCFP中相干快门的曝光时间取决于探针光和参考光中的最小脉宽,采样间隔取决于探针光脉冲的时间延迟,采用更短的激光脉冲可以实现更高的时间分辨[59]。不同于其他类型单发超快成像方法,AOCFP采用非复用的记录方式,多幅干涉全息图在空间上是完全分离的,消除了图像间的串扰,同时可以充分利用系统的空间带宽,空间分辨上限极高。此外,AOCFP采用同轴干涉分幅成像方式,不仅保持各幅图像的同一空间和光谱基准,还可以获得复振幅信息。但是,AOCFP分光合束光路较复杂,随着分幅数的提升,所需的光学元件数量大幅度提升,难以实现更高的采样帧数。
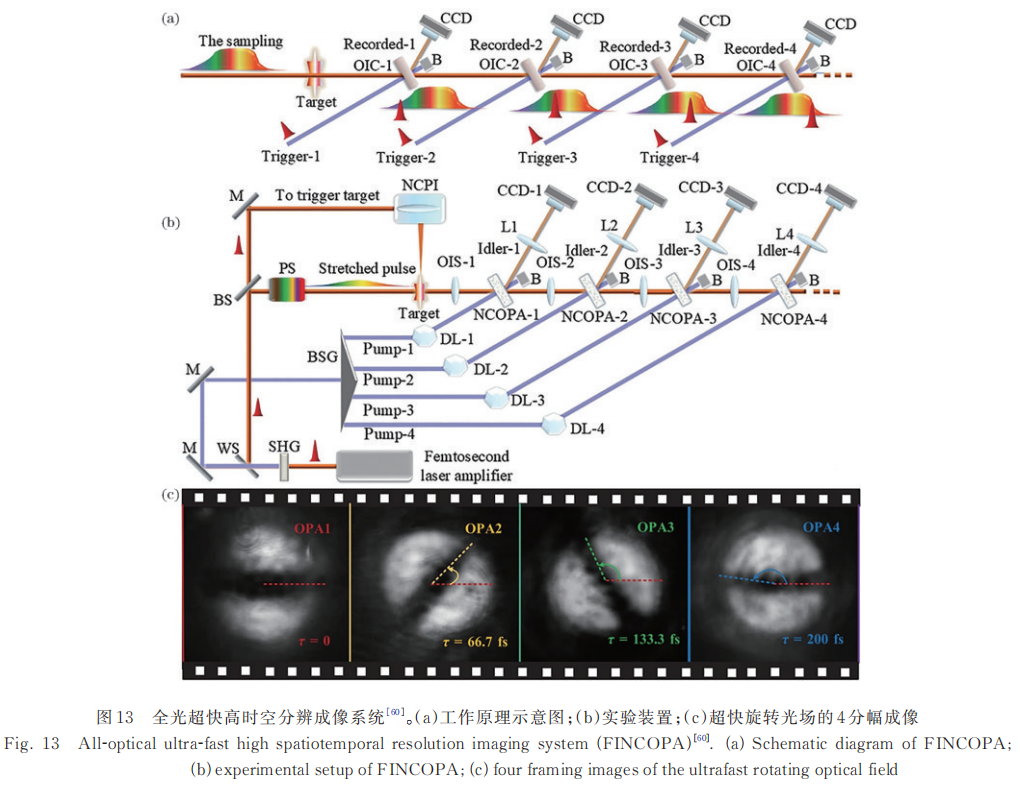
Zeng等[60]基于飞秒激光脉冲泵浦和级联非共线光学参量放大(NCOPA)研制了全光超快高时空分辨成像系统(FINCOPA),实现了时间分辨为50fs、空间分辨为83lp/mm的4分幅超快成像。如图13(a)所示,FINCOPA采用啁啾长脉冲光作为探针辐照瞬态事件,利用级联的强泵浦光分别对啁啾长探针光的某一时间片段信息进行光学参量放大,将探针光的某一时间片段信息传递到闲频光上,由不同的CCD接收进而实现分幅成像。这里OPA相当于像转换器,由于闲频光仅当泵浦光和探针光在时间重叠时才产生,超短脉宽泵浦光发挥了时间触发快门的作用。采用非共线模式的OPA,可以实现闲频光、探针光和泵浦光的空间分离。如图13(b)所示,中心波长为800nm、脉宽为40fs的激光脉冲经BBO倍频后,约30%的激光波长转换为400nm。波长分离器(WS)透射400nm波长光,反射800nm波长光。透射的400nm激光脉冲经分束器组(BSG)分为4子束,用作OPA的泵浦光,通过延迟线(DL)调节各子束间的时间延迟。反射的800nm激光脉冲经分束器(BS)分为探针光和激发光,探针光经光栅色散展宽到50ps,激发光用于激发瞬态事件。长啁啾探针光辐照瞬态事件后,传输到级联OPA中,由不同时序的泵浦光选通探针光的不同时间片段,实现分幅成像。实验中,利用FINCOPA相机对等离子体光栅和超快旋转光场实现高达15Tframe/s采样频率、50fs时间分辨的高空间分辨超快成像。FINCOPA构思巧妙,利用OPA过程记录瞬态事件,控制泵浦光与探针光的时序实现场景片段的提取。采样帧数由OPA的级数决定,采样频率可由各级OPA的相对延迟得到灵活调整。时间分辨取决于触发OPA的泵浦光脉宽和放大增益,增益越高,等效曝光时间越短[61]。空间分辨主要由光参量放大器和成像系统的空间带宽决定,成像过程中没有器件移动,动态空间分辨等价于静态分辨。由上述内容可以看出,时间分辨、空间分辨、采样帧数和采样频率不存在相互制约的情况,FINCOPA相机可拓展性强。然而,受限于激光系统输出功率和光路结构配置,FINCOPA难以实现数十帧的分幅数。类似于时间波长映射类方法,FINCOPA所获取的多幅图像不是同一光谱基准,不适应于非啁啾光。
光束触发快门类方法利用超短激光本身作为触发快门实现对多帧图像的非复用记录,可以保持非常强的时间分辨能力,同时不牺牲空间分辨力。但是,光束触发快门类方法的采样帧数与系统复杂程度成正比,难以实现数十帧的分幅数。
通过分析可以发现,多数单发超快光学成像技术不仅利用了一种机制,而且充分利用了空间、角度、波长、偏振、空间频率等多维度信息,借助各种线性或者非线性光学效应实现超快成像。这些单发超快光学成像技术构思巧妙,特征突出,推动了各类超快动态现象的研究,不断拓展人类观察未知的边界。
3 被动式单发超快光场成像技术
被动式探测类方法不对光信息进行直接调制,不需要主动照明,由超快光电探测器实现超快时间分辨。与主动式探测方法相比,被动式探测方法在自发光和宽光谱成像场景中具备独特优势,可分为超快探测器直接探测类和图像重建类。
超快光场探测器主要有基于快电子学原理的分幅相机[62-63]、高速取样相机[64]和原位存储电子快门相 机[23,65-68]等。其中,微通道板(MCP)行波选通型分幅相机发展相对成熟,其基本原理是控制脉宽极窄的电脉冲选通并放大不同时刻的图像。国际上,斯坦福计算光学公司研制的超高速分幅相机可实现最小门宽200ps[62]。国内西安中智科仪公司研制的“逐光”分幅相机可实现最小门宽500ps[63]。虽然MCP分幅相机能够提供二维时间分辨信息,但是存在动态范围有限、增益误差、校准复杂和红外波段光谱响应困难等诸多限制[69]。此外,在单一视线范围内,MCP分幅相机只能提供1帧图像。高速取样相机借助条纹相机实现超高的时间分辨,但其空间分辨力较低,实用性偏弱,这里不再展开。
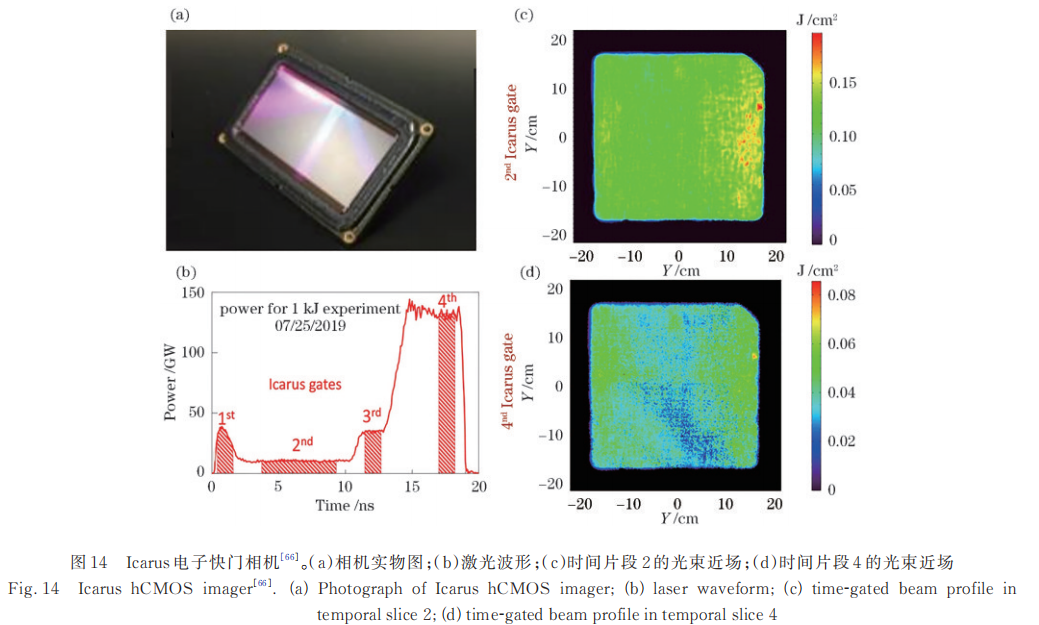
Hart等[23]、Hurd等[66]和Lanier等[70]在美国国家点火装置(NIF)部署了Icarus-2hCMOS原位存储电子快门相机,开展了含时分辨高功率光场演化规律研究,实现了最小门宽1ns的4分幅成像。Icarus-2相机是由美国圣地亚实验室(SNL)研制的,具备4帧触发功能,4幅图来自同一视场,各幅之间无视角差,可对从X射线到红外波段的信息进行成像[23,71]。相机具有1024×512的像素阵列和25μm的空间分辨率,动态范围可达2000∶1。曝光模式的Icarus相机所采用的核心器件包括金属氧化物半导体场效应晶体管(MOSFET)开关、光电二极管像素阵列(PPD)和读出集成电路(ROIC)等。Icarus相机使用MOSFET开关作为电子快门在纳秒时间尺度上捕获多帧图像,并将多帧图像信息原位存储在PPD内的存储元件上,然后在较慢的时间尺度上读取多帧图像信息。具体地,在外部触发下,Icarus相机产生4个预编程的高速快门脉冲并将快门脉冲分配到PPD,每一个PPD中的像素产生的电子空穴对通过一系列电容在每一个像素中得到原位收集和存储,这样将在纳秒时间尺度上以像素为单位存储多个帧。最后,在图像捕获后约200ms,由PPD直接耦合的ROIC读出多帧图像。如图14所示,实验中采用Icarus相机研究了NIF中整形激光脉冲的时空耦合问题,发现不同时刻的高功率激光近场分布存在差异,展示了存在于光场局域的突变点。Icarus相机成功应用于系列高能量密度物理实验,实现了1ns时间分辨的4分幅超快现象成像,是目前实用程度最高的超快光学成像仪器之一。在Icarus相机中,帧数由给定像素空间中可以容纳的存储元件的数量决定,由于加工工艺限制,采样帧数难以突破数十帧。此外,原位存储相机受限于半导体体系,其最小门宽难以突破亚纳秒级,无法实现更细微时间尺度上物理现象的表征。
图像重建类主要包括压缩超快成像和多孔径压缩感知成像等[25-26,72-75]。这类基于压缩感知理论的方法可以从欠采样的稀疏数据中恢复重构出瞬态场景。例如,单通道超快压缩成像技术利用狭缝完全打开的条纹相机扫描记录编码信息,利用重构算法,迭代获得时变的各幅二维图像[25]。然而,这类方法要求测量对象必须具备稀疏性,重建方案较复杂,实时性较差,难以实现大画幅、高空间分辨测量。压缩成像将高维数据压缩映射到较低维度,有利于将三维光场信息投影到二维探测器上,借助高时间分辨的条纹相机可以实现超快成像,因其在成像程度和序列深度等方面的独特优势,近年来发展迅猛。篇幅有限,有关压缩感知的详细综述可以参考文献[72,76-77]。
4 总结与展望
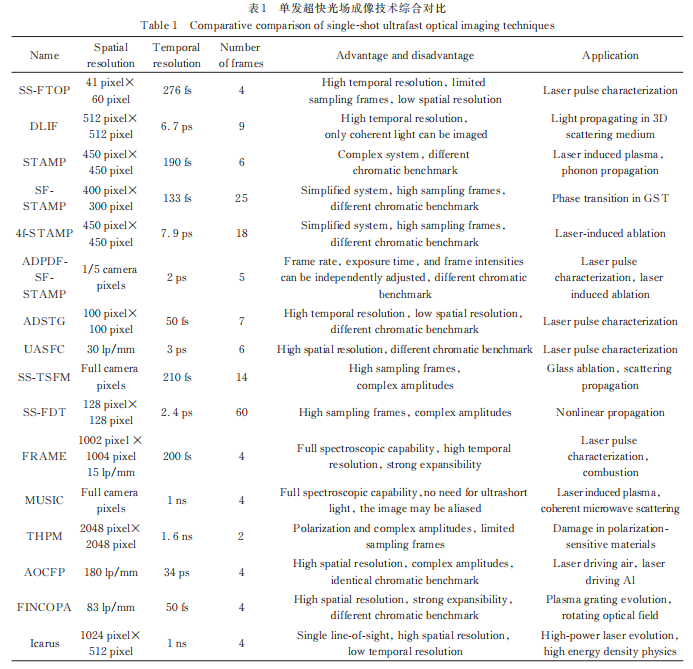
根据照明方式的不同,将单发超快光场成像技术分为主动式探测和被动式探测两大类。主动式探测类方法通常采用超短脉冲串作为探针基元进行瞬态事件测量,并在空间、波长、角度、偏振或空间频率等维度进行主动编码。被动式探测类方法不对探针光进行编码,通常借助超快探测器和先进算法等实现超快光学成像。本文从基本原理、应用、优势和局限性等方面综述了15种主动式探测类方法和1种被动式探测类方法。表1从空间分辨、时间分辨、采样帧数、优劣势以及应用场景等多角度对比分析了16种单发超快光场成像技术的差异。
主动式探测类方法可以进一步分为:空间分割、时间波长映射、角度复用、空间频率复用和光束触发快门等。多数单发超快光场成像技术不是依靠单一的机制进行时间分辨测量的。空间分割思路广泛存在于各类单发超快光场成像技术中,空间分割特征较为突出的技术主要有SS-FTOP和DLIF。在仅使用单一成像器件的情况下,空间分割类方法的采样帧数与成像视场相冲突,空间分辨力偏弱,如SS-FTOP的成像范围仅41pixel×60pixel;如果使用多个成像器件,将增加系统复杂度。SS-FTOP可以对高功率激光在介质中的非线性传输演化过程进行超快成像;DLIF可以实现激光脉冲自身传播过程的成像记录,但是由于DLIF是基于干涉原理的,仅可对相干光成像,不能用于观察非相干照明条件下的瞬态事件。
时间波长映射类方法主要利用啁啾超短脉冲的宽光谱作为编码载体,不同光谱成分与时间延迟间具有线性映射关系,主要技术包括STAMP、ADSTG和UASFC。近年来,STAMP迭代较快,SF-STAMP和4f-STAMP结合DOE衍射分束、光谱窄带滤波和阵列切面反射镜等技术将传统STAMP的采样帧数由4帧分别增加到25帧和18帧,同时简化了系统设计。ADPDF-SF-STAMP作为该类技术的集大成者,利用AOPDF对光谱域和时间域的相位幅度进行整形,实现了曝光时间、帧速率和帧强度的独立控制,实现了无透镜5分幅等幅度成像,进一步提升了STAMP类方法的实用性。STAMP类方法可以应用于强激光诱导产生等离子体、晶格振动波传播、光学克尔门演化、晶体相变、激光诱导烧蚀等瞬态事件的研究表征。ADSTG利用瞬态光栅的角度和波长选择性实现了对啁啾光本身的时空表征,时间分辨力较高,但是存在空间分辨有限的缺陷。UASFC将时间-波长映射拓展为时间-波长偏振映射,拓展了采样帧数,其最小时间分辨力取决于半导体的响应,可以实现光场演化行为的动态测量。如果进一步结合SF-STAMP对UASFC进行拓展,优化设计后可实现数十帧的采样。时间波长映射类方法可实现百飞秒量级时间分辨的多帧超快成像,但是所获取的多幅图不在同一光谱基准,影响图像解读。
角度复用类方法以不同的角度探测记录瞬态事件,并结合其他技术解析出动态演化场景,代表技术有SS-TSFM和SS-FDT。SS-TSFM通过不同角度的探针光与参考光干涉记录形成角度复用全息图,经频域解析恢复瞬态事件,可以获得复振幅信息,其空间分辨力较高,有利于完整分析超快演化现象。SS-TSFM利用SLM和定制阶梯光学元件构成的独特光学布局,突破了角度复用类方法采样帧数较少的缺陷,实现了时间分辨为210fs的14帧成像,演示了光在散射介质中的传播、激光玻璃烧蚀和强激光击穿空气产生等离子体等瞬态事件的超快成像。在SS-FDT中,不同角度的子脉冲从不同的角度记录瞬态事件的投影,角度复用是为了实现计算层析重建。重建瞬态场景的时间分辨约为2.4ps,然而稀疏的角度采样将形成伪影,降低图像成像质量。采用SS-FDT可以研究强激光非线性传输的演化过程,解析出瞬态折射率演化,为阐明强激光与物质相互作用的物理机制奠定基础。可见,角度复用通常与全息等技术结合实现超快成像,角度在这里提供了一个维度以承载编码。
空间频率复用类方法是将不同的空间频率载波附加到具备不同时间延迟的探针脉冲串上的,主要有光栅调制附加载频和干涉附加载频2种方式,代表技术包括FRAME、MUSIC和THPM。FRAME在前级利用光栅调制编码超短探针光,在后级空间频域识别解析出瞬态事件。FRAME基于像传递原理,消除了宽度啁啾光带来的色散影响,具备全光谱成像兼容能力。MUSIC不需要使用超短脉冲作为探针光,其时间分辨是依靠各子束的不同延迟时间和窄门宽选通相机实现的,不同帧的图像可能存在混叠。基于FRAME、MUSIC等的技术可以实现对激光脉冲表征、光学克尔门演化、火焰燃烧、激光诱导产生等离子体、相干微波散射等瞬态事件的超快成像。THPM利用二维光栅复合编码获得正交偏振态下的复振幅信息,尤其适合监测偏振敏感材料中的超快现象,但是采样帧数有限。在空间频率复用类方法中,增加帧数会导致空间频域信息的重叠,这表明采样帧数与空间分辨间存在制约关系。
光束触发快门类方法是利用超短激光脉冲本身的短脉宽作为触发快门去截断瞬态事件的,主要有AOCFP和FINCOPA。AOCFP基于并行结构相干快门原理,采用同轴干涉分幅成像方式,不仅保持各帧图像的同一空间和光谱基准,还可以获得复振幅信息,但是AOCFP分光合束光路较复杂,难以实现较大的采样帧数。实验中,采用AOCFP实现了激光诱导空气电离和激光加载铝箔等瞬态事件的4分幅超快成像。FINCOPA是基于非共线光学参量放大原理的,其时间分辨、空间分辨、采用帧数和采样频率间不存在相互制约的情况,时间分辨和空间分辨可达50fs和83lp/mm。然而,受限于激光系统和光路结构配置,FINCOPA难以实现较大的采样帧数。利用FINCOPA的超快时间分辨能力可以实现对超快旋转光场与等离子体光栅等瞬态事件的实时成像监测。类似于时间波长映射类方法,FINCOPA相机所获取的多幅图像不是同一光谱基准。
被动式探测类方法不对光信息进行直接调制,不需要主动照明,由超快光电探测器和先进算法实现超快时间分辨。其中,Icarus相机作为目前实用度较高的原位存储电子快门相机,能够实现单视线成像,并且具有较高的空间分辨率。因此,它已经应用于高能量密度物理和高功率光场的含时分辨诊断方面。然而,由于受到半导体工艺的限制,Icarus相机的时间分辨难以达到亚纳秒级别。
单发超快光场成像技术的前景充满无限可能,其创新的原理和精巧的设计为科学探索提供了广阔的平台。尽管不同的单发超快光场成像技术有特定的局限性,但它们各自也具备独特的优势,其性能特点和表现出的优势会因原理的差异而不同。首先,单发超快光场成像技术将不断追求更高的采样帧数、更短的时间分辨率、更高的空间分辨率、更丰富的维度信息获取能力及更强的兼容性。以多维度信息获取能力为例,如光强、相位和偏振等,多维度的信息获取能力将极大地扩展单发超快光场成像技术的应用范围,使我们能够更深入地洞察瞬态事件的演变过程。其次,单发超快光场成像技术应更加注重与物理学、化学、生物学等领域的实际超快成像需求场景的结合。通过优化设计,不断创新,进一步拓展其应用范围。例如,在物理学领域,单发超快光场成像技术有助于揭示高功率激光非线性传输的物理机制,研究等离子体的演化规律,表征超快光场本身的演化特性,观察晶体相变,研究火焰燃烧和三维散射等瞬态演化现象的机理。再者,单发超快光场成像技术在化学领域的应用价值也不容忽视。它能够用来研究化学反应的动力学过程,揭示化学反应的时间尺度、反应路径和产物分布等,进一步理解化学反应的微观机制和过程,为材料科学、能源科学和环境科学等领域提供重要的基础数据。在生物学领域,单发超快光场成像技术同样可以用来研究细胞膜的动态行为、神经信号的传递及蛋白质的折叠等精细过程,使我们更好地了解生命活动的本质和机制,为疾病诊断和治疗提供新的思路和方法。
此外,新技术的不断发展将显著提升现有单发超快光场成像技术的性能。例如:结合MUSIC和Icarus相机可以实现更为精细的时间分辨和更高的采样帧数;结合光谱复用层析成像技术有助于解决SS-FDT探测角度有限的问题,提升系统的空间分辨力。激光技术、光电子技术、非线性光学、成像理论和计算技术等多学科的快速融合发展将为单发超快光场成像技术的创新发展提供坚实的基础,并将进一步提升现有技术的性能,推动对各类超快动态现象的研究,不断拓展人类对未知领域的认知边界。
文章来源:激光与光电子学进展
文章作者:宗兆玉、赵军普、张波、夏彦文、李平、郑万国
声明:转载此文目的在于传递更多信息,仅供读者学习、交流之目的。文章版权归原作者所有,如有侵权,请联系删除。





![[数据结构与算法·C++] 笔记 2.1 线性表](https://i-blog.csdnimg.cn/direct/dadbec2c12074b60983861b117f59f72.png#pic_left)