在实际编程实践中,特别是使用C++的Eigen库时,需要掌握多种空间旋转表示之间的转换。本文将深入探讨欧拉角与旋转矩阵之间的相互转换,这是使用库时常见的操作。
首先,让我们了解欧拉角。它是指通过围绕三个基本坐标轴旋转来表示三维对象旋转的旋转参数,通常标记为θx, θy, θz。欧拉角有正负之分,与绕轴旋转方向有关。
欧拉角的取值范围通常是从0到360度。旋转顺序和旋转轴的选择对于欧拉角的表示至关重要。欧拉角可以是内旋也可以是外旋,内旋表示围绕自身轴进行的旋转,而外旋是围绕固定轴的旋转。旋转顺序在欧拉角中也起着核心作用,常见的顺序有XYZ、XZX、ZYZ等。
旋转矩阵是另一种用于表示三维旋转的方式。为了从XYZ坐标系变换到一个特定旋转的角度,可以使用一个 3x3 的旋转矩阵。对于绕XYZ三个轴旋转的欧拉角而言,其对应的旋转矩阵可以分为两步来计算:
对于内旋(绕自身轴的旋转),使用矩阵相乘(右乘),计算顺序为 Rz(θz) * Ry(θy) * Rx(θx),得到旋转矩阵:
R = Rz(θz) * Ry(θy) * Rx(θx)
对于外旋(绕固定轴的旋转),使用矩阵相乘(左乘),计算顺序为 R(θx) * R(θy) * R(θz),得到旋转矩阵:
R = R(θx) * R(θy) * R(θz)
这里的 R(α) 表示围绕α轴旋转α角度的旋转矩阵。外旋和内旋的区别在于旋转矩阵的计算顺序,但它们的结果是等价的,即 R1=R2,意味着 ZYX 内旋与 XYZ 外旋相等。
旋转矩阵在机器人学和三维图形学中常常被用于将坐标从一个姿态变换到另一个姿态。当需要将欧拉角转换为旋转矩阵时,只需按照外旋顺序(X-Y-Z)构建矩阵,即:
R = Rx(θx) * Ry(θy) * Rz(θz)
这代表将三维空间中的点按照欧拉角指定的顺序和幅度进行旋转。
以下是一个使用 Eigen 库的示例代码片段来演示欧拉角与旋转矩阵之间的转换过程。使用这段代码,可以验证不同方法下的转换结果一致性。
最后的总结是对细节的把握和理解。在实际应用中,准确理解欧拉角的表示、旋转顺序、内旋与外旋的区别,对避免常见的计算错误至关重要。同时,注意欧拉角的定义范围(通常0到360度),正确使用矩阵相乘,选择合适的旋转顺序,都关系着转换结果的准确性。如在本文讨论中的任何误解或错误,请在评论区指出,帮助提高文章的准确性和可操作性。
欧拉角和旋转矩阵之间的转换
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.xdnf.cn/news/35931.html
如若内容造成侵权/违法违规/事实不符,请联系一条长河网进行投诉反馈,一经查实,立即删除!相关文章

基于SpringBoot+Vue框架的在线考试系统的设计与实现
基于SpringBootVue框架的在线考试系统的设计与实现
系统合集跳转
源码获取链接
一、系统环境
运行环境: 最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。 IDE环境: Eclipse,Myeclipse,IDEA或者Spring Tool Suite都可以 tomcat环…
楼房销售系统设计与实现
文末获取源码和万字论文,制作不易,感谢点赞支持。 毕 业 设 计(论 文) 题目:楼房销售系统设计与实现 摘 要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储…

King’s Biobank 生物样本库管理系统:高效、智能的样本管理解决方案
近年来,生物样本资源已成为生物医药产业和国家生物安全战略的核心基石,在病因研究、临床诊疗及疾病预防等多个关键领域发挥着不可替代的作用。然而,科研机构、检测中心和医院在样本管理方面普遍面临以下挑战: 重复记录,…

spring下的beanutils.copyProperties实现深拷贝
spring下的beanutils.copyProperties方法是深拷贝还是浅拷贝?可以实现深拷贝吗?
答案:浅拷贝。
一、浅拷贝深拷贝的理解
简单说拷贝就是将一个类中的属性拷贝到另一个中,对于BeanUtils.copyProperties来说,你必须保…

Linux---对缓冲区的简单理解--第一个系统程序
前序: 首先先理解一下什么是回车与换行;回车和换行是两个概念,它们不是一个东西; 回车:光标回到开始;换行:换到下一行; 如下图: 行缓冲区
如何理解缓冲区问题?
可以认为࿰…

『RabbitMQ』 windows下 安装RabbitMQ 并在Python中使用测试
目录 1. 安装ERLANG2. 安装RabbitMQ3. 新建用户Python的测试代码 生产者和消费者总结欢迎关注 『RabbitMQ』 专栏,持续更新中 欢迎关注 『RabbitMQ』 专栏,持续更新中 1. 安装ERLANG
下载之前先看兼容性,这里我打算下载26.1版本的Erlang以适配RabbitMQ
cloud.emqx.com/cons…
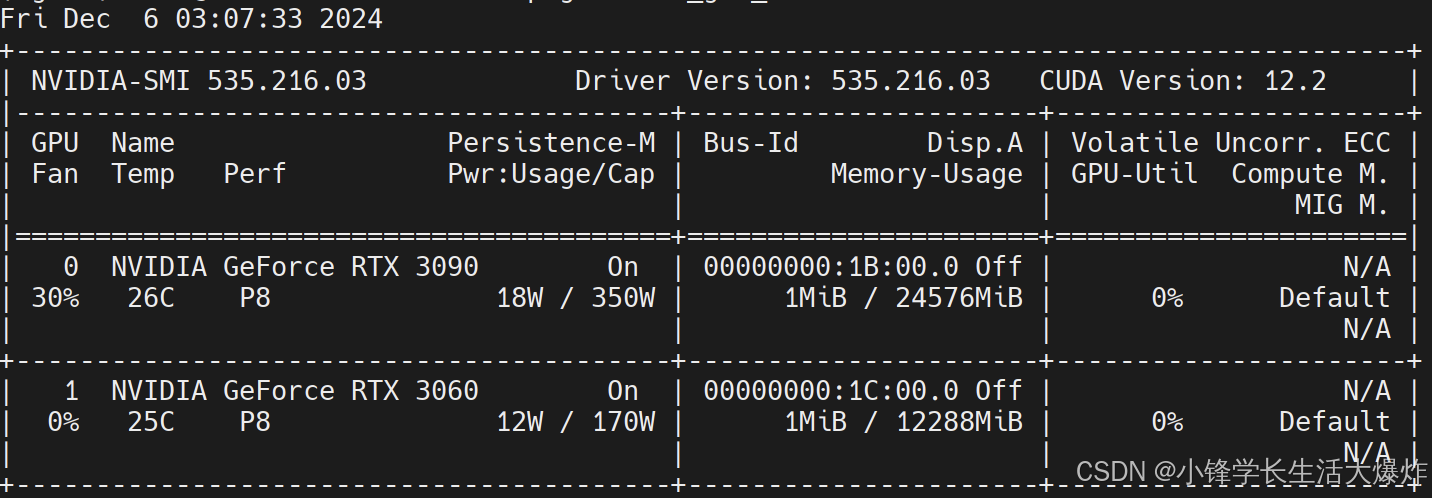
【教程】创建NVIDIA Docker共享使用主机的GPU
转载请注明出处:小锋学长生活大爆炸[xfxuezhagn.cn] 如果本文帮助到了你,欢迎[点赞、收藏、关注]哦~ 这套是我跑完整理的。直接上干货,复制粘贴即可!
# 先安装toolkit
sudo apt-get update
sudo apt-get install -y ca-certifica…

麒麟信安受邀参加重庆教育装备专家培训会,共探教育信息化发展新趋势
近日,重庆市教育装备协会2024年区教育装备专家培训会举行,重庆各区教育信息技术与装备中心、教育委员会等相关领导参加。会上,麒麟信安作为协会成员单位发表主题演讲,与参会嘉宾深入探讨教育信息化工作的创新做法和实践经验&#…

2025澄迈漓岛音乐节品牌招商大会成功举行
——共谋音乐盛事,携手推动文化经济发展
12月6日,“2025澄迈漓岛音乐节品牌招商大会”(以下简称“招商大会”)在澄迈举行。本次大会由澄迈福山发展有限公司、福山咖啡文化风情镇旅游区联合主办,海南绿发投资有限公司承…

从零开始学TiDB(1) 核心组件架构概述
首先TiDB深度兼容MySQL 5.7 1. TiDB Server
SQL语句的解析与编译:首先一条SQL语句最先到达的地方是TiDB Server集群,TiDB Server是无状态的,不存储数据,SQL 发过来之后TiDB Server 负责 解析,优化,编译 这…


【SpringBoot】SpringBoot中分页插件(PageHelper)的使用
目录
1.分页概念
2.原生写法
3.PageHelper插件分页查询
3.1 介绍
3.2?使用
3.3 Page对象和PageInf对象 1.分页概念 用户查询的数据不可能一次性全部展示给用户(如果用户有一万条数据呢),而是分页展示给用户,这就是分页查询…

python操作数据库
文章目录 基础使用数据插入 基础使用
python使用第三方库pymysql来操作mysql数据库
安装:
pip install pymysqlfrom pymysql import Connection# 获取到MySQL数据库的链接对象conn Connection(hostlocalhost # 主机名,port3306 # 端口,默…

【01】栅格切片服务发布
本文探讨的是使用GeoScene Server本身的能力去切瓦片,它可以很好地通过server自带的CachingTools GP服务去切片,可以通过调整该gp服务的最大实例数能够更好利用server所在机器cpu的能力; 如果server站点已经发布了很多服务,则不建…

非极大值抑制(Non-Maximum Suppression,简称NMS)是什么?
非极大值抑制(Non-Maximum Suppression,简称NMS)是一种常用于目标检测任务中的后处理技术,主要用于从多个候选框中选出最合适的边界框,并抑制那些与最优候选框重叠度高且分类置信度低的框。 NMS的目的:
在…

【Java】A *算法的应用
代码和测试图片下载地址:
https://download.csdn.net/download/r77683962/90089371 这个地图里黑色部分是不能通过的,白色部分是可以通过的,这个算法没问题,有点感觉效率不太高。。。。。 效果: 源代码PathFind.java&…

日本IT|企业需要什么样的技术?
日本IT企业所需的技术非常多样化,涵盖了多个领域和方面。以下是一些日本IT企业通常所需的主要技术:
一、编程语言与工具
编程语言:Java、Python、C、C#、PHP等是日本IT企业常用的编程语言。这些语言在软件开发、数据分析、网络应用等方面都…

刘铁猛C#入门 030 泛型,partial类,枚举,结构
泛型(generic)无处不在
为什么需要泛型:避免成员膨胀或者类型膨胀 正交性:泛型类型(类/接口/委托/......)泛型成员(属性/方法/字段/....类型方法的参数推断 泛型接口/类的 类型参数不只有一个泛型与委托、lambda表达式实现泛型接口类时 ,实现…

视频加密的好处与加密方法分析2024
视频内容的多样化不止局限于电视、电影,在日常培训学习中也是必不可少的。那么对于做知识付费的人来说,视频内容的安全性就尤为重要。视频加密也就i随之兴起,为视频内容安全多了一层保障,那么主要体现下那几个方面呢?可…
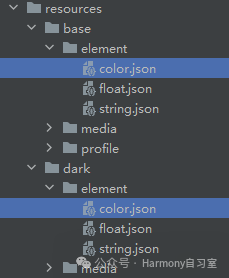
鸿蒙UI开发——亮/暗色模式适配
1、概 述
系统存在深浅色两种显示模式,为了给用户更好的使用体验,应用最好适配暗色和亮色两种模式。从应用与系统配置关联的角度来看,适配暗色和亮色模式可以分为下面两种情况: 应用跟随系统的深浅色模式; 应用主动设…