单片机-89C51部分:9、串行口通讯
飞书文档![]() https://x509p6c8to.feishu.cn/wiki/WSh3wnADkixHspk7kc8c5esRnad
https://x509p6c8to.feishu.cn/wiki/WSh3wnADkixHspk7kc8c5esRnad
一、什么是串口?它的作用?
串行口,简称为串口,什么是串口?它的作用是什么?
两个人交流,一般通过在说话在空气中产生的声波传输,两台机器交流,我们可以模拟摩斯密码一样,其中一台机器通过IO发送对应频率高低电平的脉冲,另一台机器接收进行解析,但这种操作IO的方式需要我们考虑的问题很多,多快的频率,谁发谁收,丢失了一个脉冲怎么办等等,于是后面就有了规范这些交流的协议,简称为通讯协议,基于通讯方式的不同,也有了串行通讯和并行通讯两种通讯方式。
串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信。
串行通信
串行通信是指使用一条数据线,将数据一位一位地依次传输,每一位数据占据一个固定的时间长度。其只需要少数几条线就可以在系统间交换信息,特别适用于计算机与计算机,计算机与外设之间的远距离通信,先传输低位在传输高位。如下图所示:

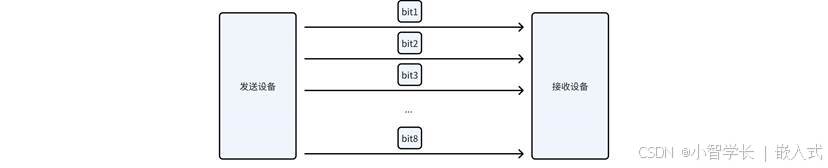
并行通信
并行通信通常是将数据字节的各位用多条数据线同时进行传送,通常是8位,16位,32位等数据一起传输。如下图所示:
对比:
串行通信的特点:传输线少,长距离传送时成本低,且可以利用电话网等现成的设备,但数据的传送控制比并行通信复杂。
并行通信的特点:控制简单,传输速度快;由于传输线较多,长距离传送时成本高且接收方的各位同时接受存在困难,抗干扰能力差。
现阶段绝大部分的通讯口都使用串口。
二、串口的参数
串行通信的基本方式
单工通信:数据只能单方向传输。
半双工通信:通信双方交替进行双向数据传输,但两个方向的传输不能同时进行。
全双工通信:通信双方可同时进行数据收发的工作方式。51单片机的串行口是全双工传输方式。
串口电平标准
是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
• TTL电平(transistor transistor logic ): +3V~+5V 表示 1 , 0V 表示 0
• RS232 电平: -3~-15V 表示 1 , +3~+15V 表示 0
• RS485 电平:两线压差 +2~+6V 表示 1 , -2~-6V 表示 0 (差分信号)
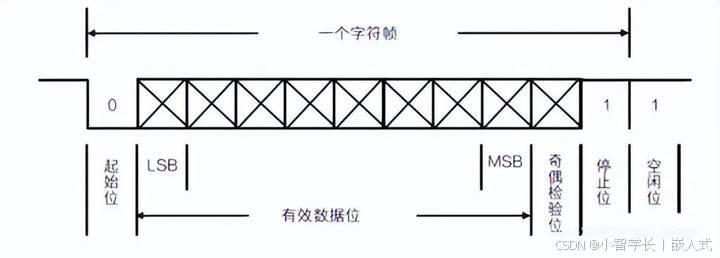
串口数据结构
一个完整的串行数据,也就是一个数据帧(Data frame),包括起始位、数据位、停止位、奇偶校验位。数据位前后即帧头和帧尾,包含一些必要的控制信息。其中,MSB(Most Significant Bit)是指低地址存放最高有效字节,LSB(Least Significant Bit)则是低地址存放最低有效字节。
- 20 - > 0x14 -> 0b0001 0100
- MSB: 0010 1000
- LSB: 0001 0100
串口波特率
通俗解析就是,波特率越高,传输速度越快。
常见的串口典型的“波特率”值是 300/1200/2400/9600/19200/38400/115200 /230400等。
串口通信速率,单位时间内传输二进制的位数(例波特率为9600,指1s内传输9600位,则传输一位需要1/9600=104.17us)
串口校验位
N 无校验
不加校验位,可以少传输一位数据
O 奇校验
a要传输的数据中(不包含校验位)有奇数个‘1’ 则校验位为‘0’, 反之为‘1’
例: 数据‘1111 000’ 偶数个‘1’ 所以添加校验位为‘1’ 整体为‘1111 0000 1’
E 偶校验
要传输的数据中(不包含校验位)有偶数个‘1’ 则校验位为‘0’, 反之为‘1’
M(Mark 标记、符合)检验位固定为1
S(Space 空间、空地)校验位固定为0
串口停止位
停止位,停止位是一帧数据结束的标志,可以是1bit、1.5bit或者2bit逻辑“1” 高电平
如果没有停止位,接收设备就无法知道何时一个数据包结束,从而无法正确地处理接收到的数据。
空闲位
空闲位不算是串口报文内的数据, 它是发送完一组报文后,总线会自动将电平拉高,产生1bit 逻辑“1”的空闲位
串口调试助手
https://alithon.com/downloads
主要使用CH340驱动软件和逻辑分析仪驱动软件,可以点击飞书文档链接下载
USB转串口助手:
|
|
|
|
逻辑分析仪:
|
|
|
三、51的串口使用
硬件接线


串口相关寄存器:
一般常用的是SCON SBUF PCON IE,如果需要配置不同中断优先级的则需要配置IPH IP,SADEN、SADDR用于多机通讯,比较少用。
模式选择
STC89C52 有 1 个 UART, 有四种工作模式:
模式0:同步移位寄存器,主要用于扩展并行输入或输出口。
模式1:8位UART,波特率可变(常用)
模式2:9位UART,波特率固定(多出的1位为校验位)
模式3:9位UART,波特率可变(多出的1位为校验位)
这里简单说明下常用和其它的区别,常用的就是你使用串口功能时,一般使用模式1就能满足所有需求,像我工作这么久,做了非常多的项目,其它模式基本上没用过,所以学习时把常用的学会,原理搞懂就可以了,后面根据项目需求有目的性学习,而不是把所有细节都学一遍。
模式选择寄存器

| SM0 = 0; |
模式1说明

发送数据相关寄存器配置
发送流程
SBUF 串口数据缓冲寄存器:可写入需要发送的数据

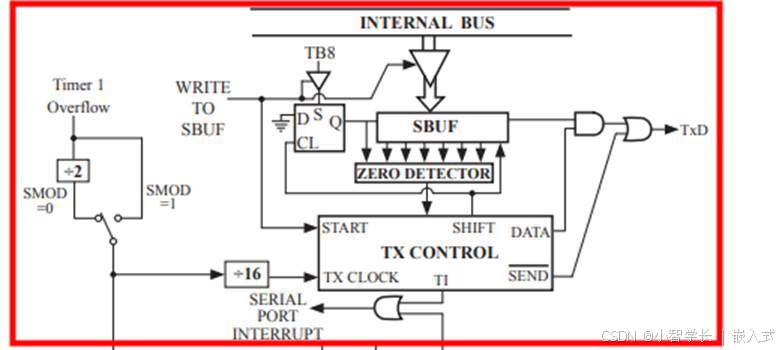

时钟源选择,影响波特率
Timer1 Overflow:定时器1溢出作为时钟源,用于串口通讯的波特率
查表法:
| 方式一: |
公式法:

如果需要设置波特率为9600=(1/32)*(11059000/12/(256-TH1))
SMOD:波特率加倍选择位,复位为0,可以不设置

| 方式一: |
校验位设置
TB8:校验位,在串口模式2、3作为校验位,模式1是8bit的,无需校验位

![]()
发送数据
发送字节函数:
#include <reg52.h>void UartInit() //9600bps@11.0592MHz
{SCON = 0x40; //0100 0000 串口工作模式1TMOD &= 0x0F; //清空TMOD中定时器1相关TMOD |= 0X20; //设置定时器1工作模式2:8位自动重载TH1 = 0xFD; //设定定时初值TL1 = 0XFD;TR1 = 1; //启动定时器1
}//主函数
void main()
{UartInit();//调用串口初始化函数SBUF=0x30;while(1){}
}发送字符串函数:
这里还需要注意一个点是发送完成最后一位后,会置TI=1,所以我们可以用TI寄存器来判断是否发送完。
#include <reg52.h>void UartInit() //9600bps@11.0592MHz
{SCON = 0x40; //0100 0000 串口工作模式1TMOD &= 0x0F; //清空TMOD中定时器1相关TMOD |= 0X20; //设置定时器1工作模式2:8位自动重载TH1 = 0xFD; //设定定时初值TL1 = 0XFD;TR1 = 1; //启动定时器1
}void send_string(unsigned char str[])
{unsigned char i=0;while(str[i]!='\0')//判断是否到字符串尾{SBUF = str[i];while(TI==0); //等待发送完成,发送完成TI会置1TI=0; //下次发送前,要手动将TI置0i++; //下次发送}
}//主函数
void main()
{UartInit();//调用串口初始化函数send_string("hello world!!");while(1){}
}
串口接收数据相关寄存器配置

波特率设置
波特率部分和发送是一样,于是初始化函数就变为
void UartInit() //9600bps@11.0592MHz
{SCON = 0x40; //0101 0000 串口工作模式1TMOD &= 0x0F; //清空TMOD中定时器1相关TMOD |= 0X20; //设置定时器1工作模式2:8位自动重载TH1 = 0xFD; //设定定时初值TL1 = 0XFD;TR1 = 1; //启动定时器1
}允许接收寄存器设置
REN 禁止/允许串口接收控制位,为1时,才能接收。


| SM0 = 0; |
接收有效数据标志位
RI:接收有效数据标志位


串口中断
接收到有效数据时,会触发串口中断,这时候,我们开启串口中断相关的寄存器,就可以在中断服务函数中处理相关逻辑,不需要在大循环中一直判断啦。
#include <reg52.h>
sbit led=P2^7;//串口初始化函数
void UartInit() //9600bps@11.0592MHz
{SCON = 0x50; //0101 0000 串口工作模式1TMOD &= 0x0F; //清空TMOD中定时器1相关TMOD |= 0X20; //设置定时器1工作模式2:8位自动重载TH1 = 0xFD; //设定定时初值TL1 = 0XFD;TR1 = 1; //启动定时器1ES=1;//打开串行通信中断EA=1;//打开总中断
}
//串行中断函数
void Uart_receive() interrupt 4
{if(RI==1)//RI=1说明串口接收到了数据{ char receive;RI=0;//RI置0保证下次接收receive=SBUF;//将从串口接收到的数据报存到变量中//判断接收的数据,作出相应的操作if(receive=='O')led=0;if(receive=='C')led=1; }
}
//主函数
void main()
{UartInit();while(1){}
}Printf发送数据
#include <reg52.h>
#include <stdio.h> void UartInit(void) //9600bps@11.0592MHz
{PCON &= 0x7F; //波特率不倍速SCON = 0x50; //8位数据,可变波特率TMOD &= 0x0F; //清除定时器1模式位TMOD |= 0x20; //设定定时器1为8位自动重装方式TL1 = 0xFD; //设定定时初值TH1 = 0xFD; //设定定时器重装值ET1 = 0; //禁止定时器1中断TR1 = 1; //启动定时器1
}/*
**重写printf调用的putchar函数,重定向到串口输出
**需要引入头文件<stdio.h>
*****/
char putchar(char dat){//输出重定向到串口SBUF = dat; //写入发送缓冲寄存器while(!TI); //等待发送完成,TI发送溢出标志位 置1TI = 0; //对溢出标志位清零return dat; //返回给函数的调用者printf
}//主函数
void main()
{UartInit();//调用串口初始化函数printf("hello\r\n");while(1){}
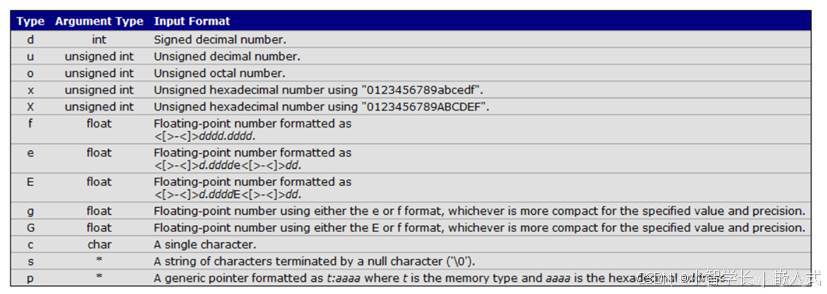
}printf格式化输出
和c语言中的格式输出稍微一些不同
例如打印 unsigned char 类型的数据需要使用 %bd
unsigned char dat1 = 48;
printf("char-->%bd\r\n",dat1); //无符号字符型使用%bd显示十进制数