【论文阅读/复现】RT-DETR的网络结构/训练/推理/验证/导出模型
利用ultralytics仓库,复现RT-DETR官方实验环境。
使用基于ResNet50和ResNet101的RT-DETR。
目录
一 RT-DETR的网络结构
1 编码器结构
2 RT-DETR
3 CCFF中的融合块
4 实验结果
二 RT-DETR的安装/训练/推理/验证/导出模型
1 安装
2 配置文件
3 训练
4 推理
5 验证
6 导出模型
一 RT-DETR的网络结构
论文题目:DETRs Beat YOLOs on Real-time Object Detection
论文地址:http://arxiv.org/pdf/2304.08069
代码地址:DETRs Beat YOLOs on Real-time Object Detection
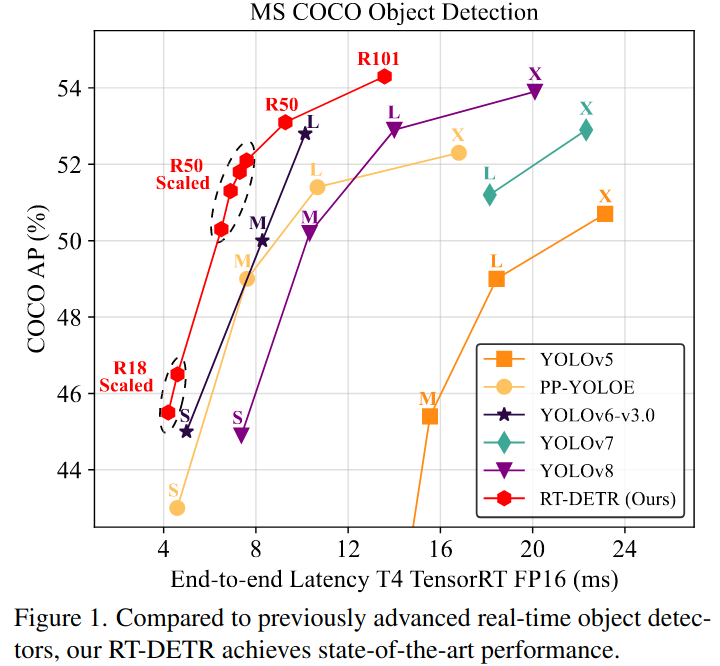
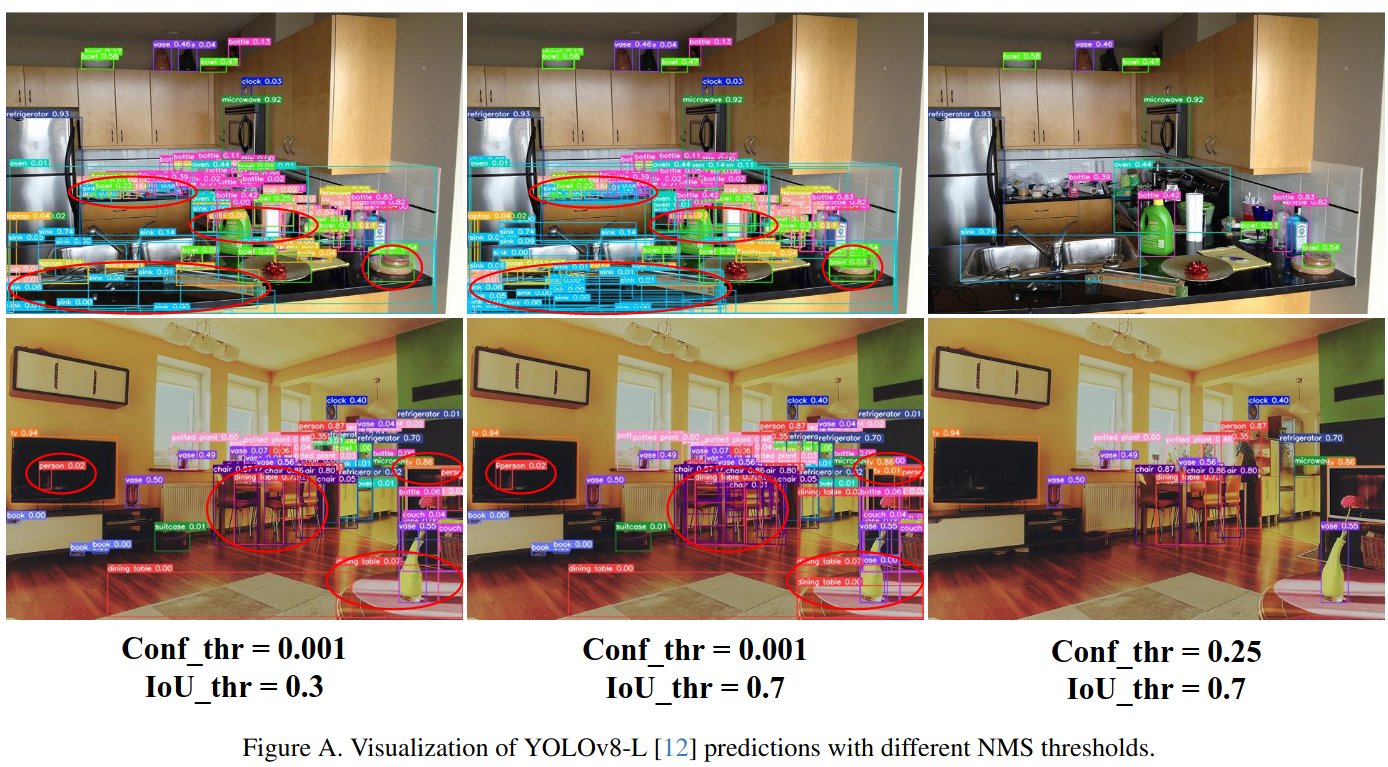
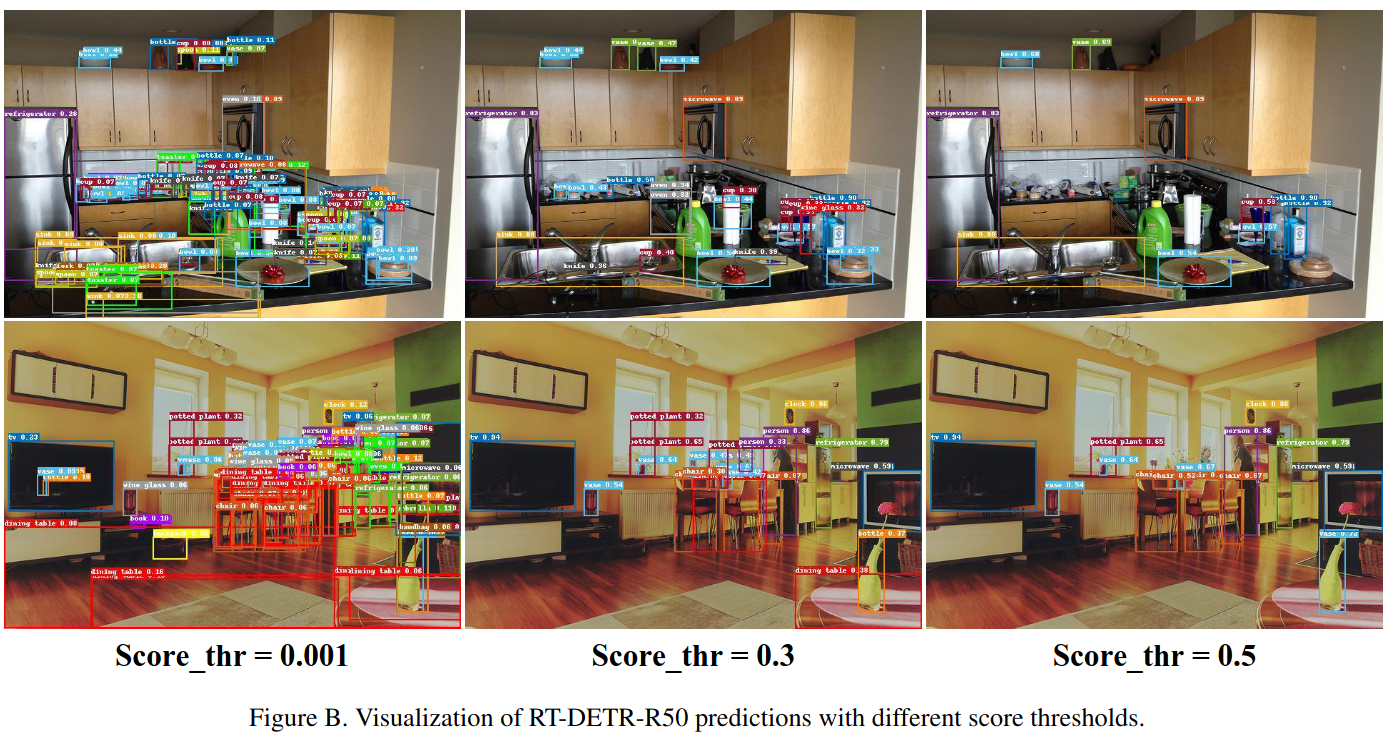
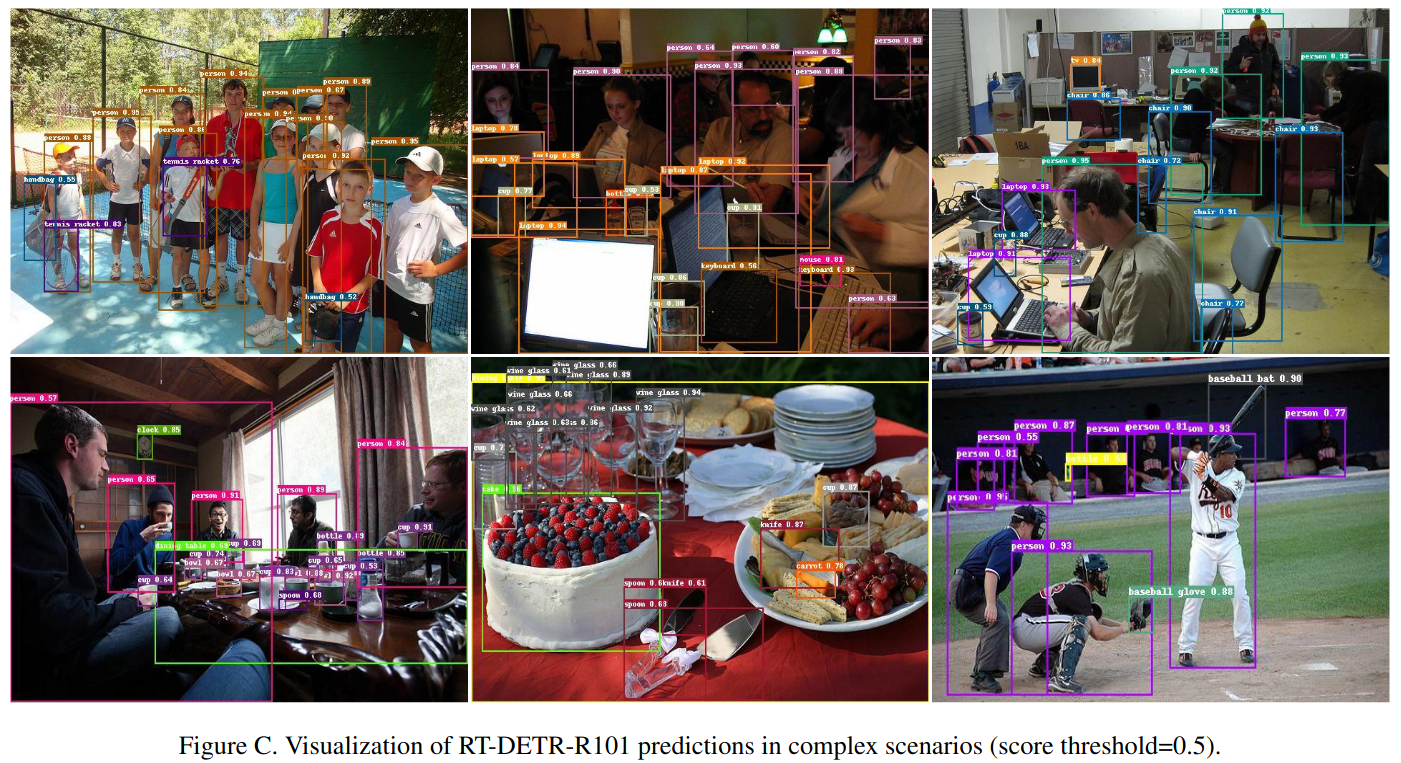
【摘要】YOLO系列由于在速度和精度之间进行了合理的权衡,已经成为最流行的实时目标检测框架。然而,我们观察到YOLOs的速度和准确性受到NMS的负面影响。最近,端到端的基于Transformer的检测器( Transformer-based detector,DETR )为消除NMS提供了一种替代方案。然而,高昂的计算成本限制了它们的实用性,阻碍了它们充分发挥排除NMS的优势。本文提出了第一个实时端到端目标检测器RT-DETR ( Real-Time DEtection TRansformer )来解决上述问题。借鉴先进的DETR,我们分两步构建RT-DETR:第一步在保持精度的同时提高速度,第二步在保持速度的同时提高精度。具体来说,设计了一个高效的混合编码器,通过解耦尺度内相互作用和跨尺度融合来快速处理多尺度特征,以提高速度。然后,提出了不确定性最小查询选择,为解码器提供高质量的初始查询,从而提高准确性。此外,RT-DETR通过调整解码器层数来支持灵活的速度调整,以适应各种场景而无需重新训练。我们的RT-DETR-R50 / R101在COCO上达到了53.1% / 54.3%的AP,在T4 GPU上达到了108 / 74 FPS,在速度和精度上都优于先前先进的YOLOs。此外,RT-DETR-R50比DINO-R50在准确率上提高了2.2% AP,在FPS上提高了约21倍。经过Objects365预训练后,RTDETR-R50 / R101取得了55.3% / 56.2%的AP。
综上,RT-DETR模型建立在于两个关键创新:
①高效混合编码器:通过解耦内部尺度交互和跨尺度融合来处理多尺度特征。这种设计显著降低了计算负担,同时保持了高性能,实现了实时目标检测。
②提出了不确定性最小的查询选择,为解码器提供高质量的初始查询,从而提高准确率。
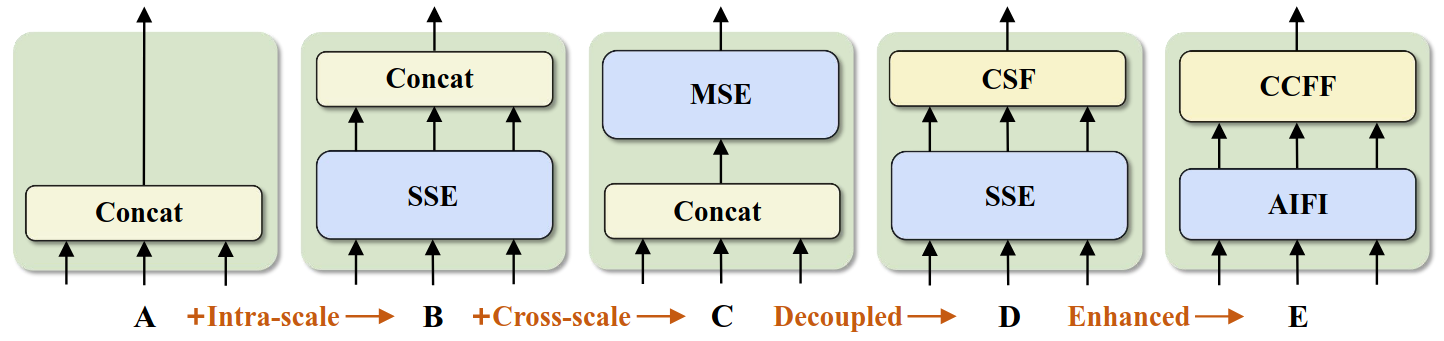
1 编码器结构
下图是每个变体的编码器结构。SSE表示单尺度Transformer编码器,MSE表示多尺度Transformer 编码器,CSF表示跨尺度融合。AIFI和CCFF是设计的混合编码器的两个模块。
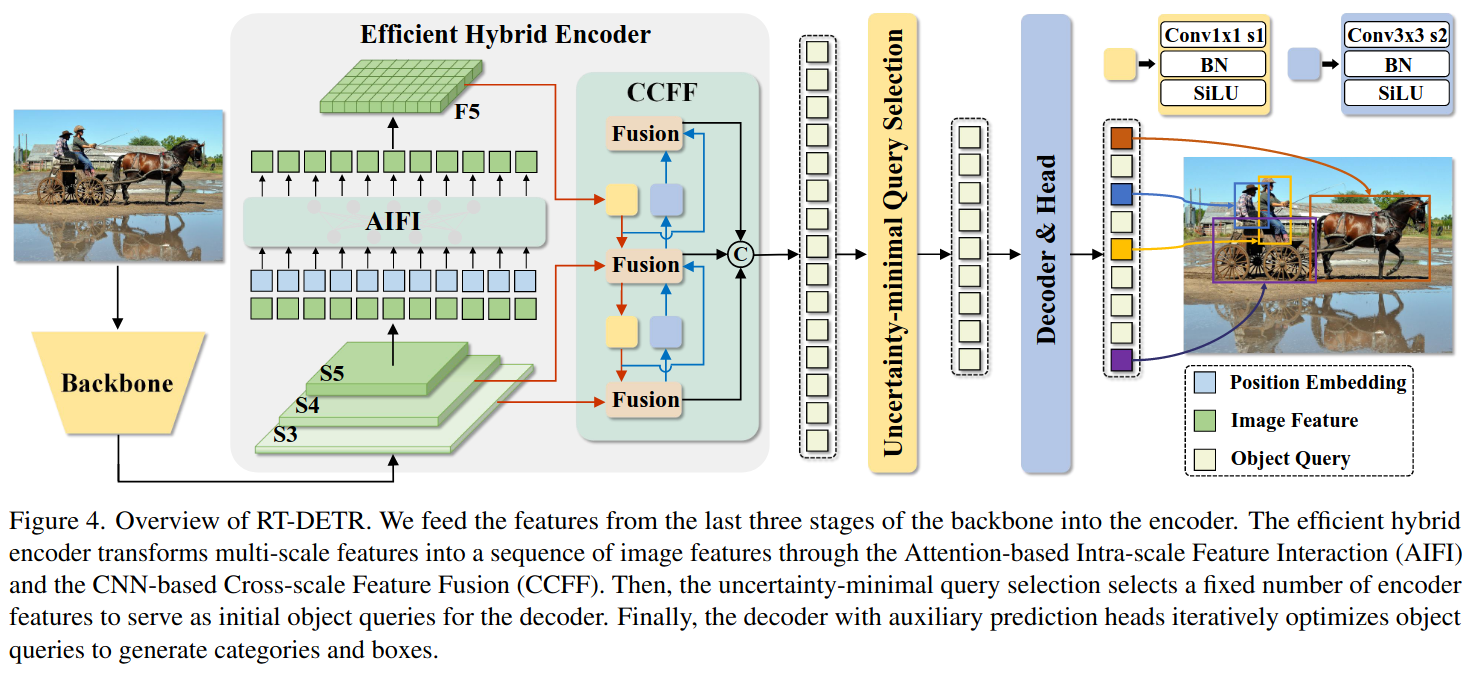
2 RT-DETR
下图为RT-DETR概述。将主干最后三个阶段的特征输入到编码器中。高效混合编码器通过基于注意力的尺度内特征交互(AIFI)和基于cnn的跨尺度特征融合(CCFF)将多尺度特征转化为图像特征序列。然后,最小不确定性查询选择固定数量的编码器特征作为解码器的初始对象查询。最后,具有辅助预测头的解码器迭代优化对象查询以生成类别和框。
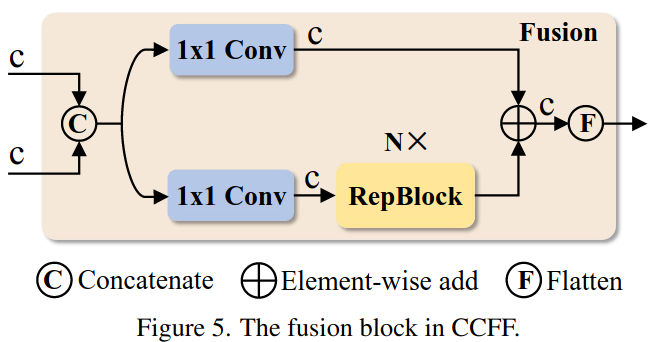
3 CCFF中的融合块
下图为CCFF中的融合块。
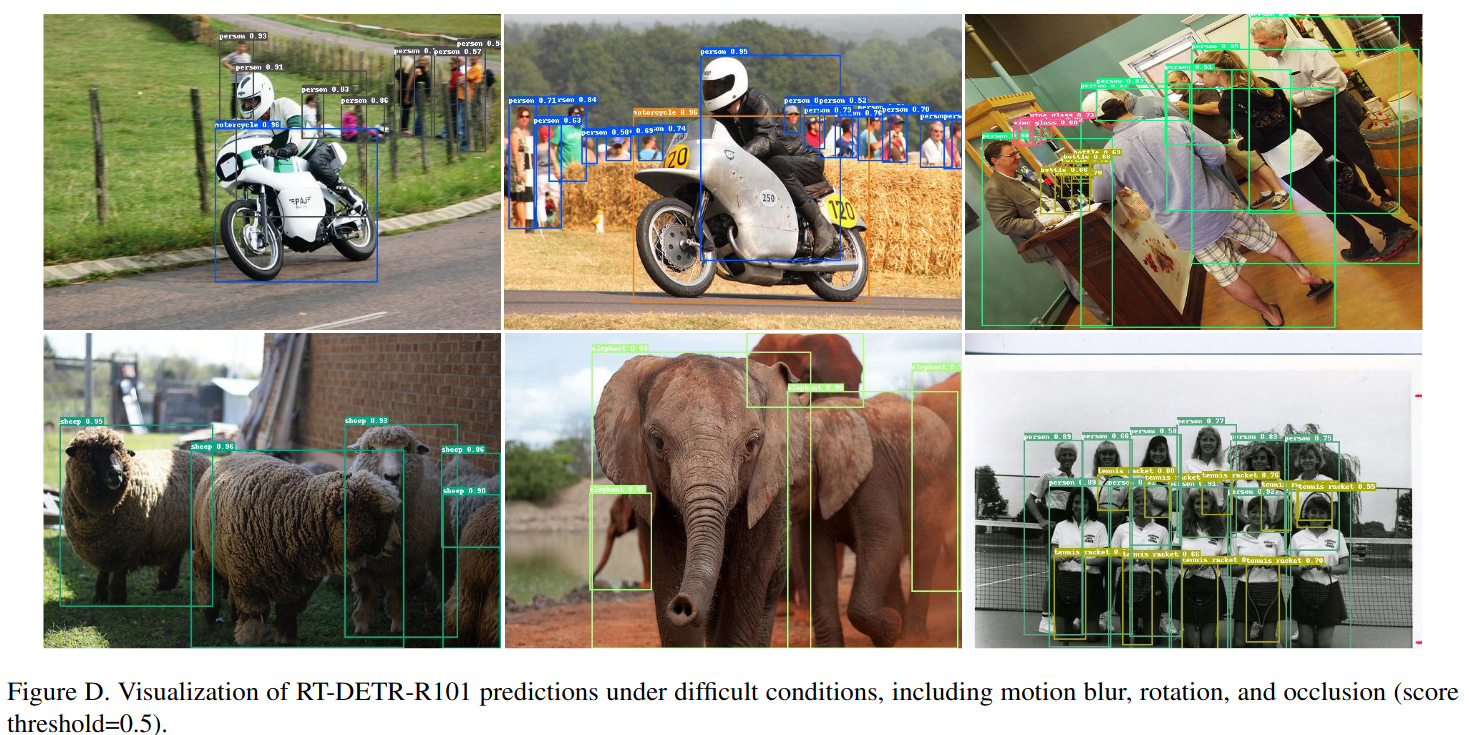
4 实验结果
二 RT-DETR的安装/训练/推理/验证/导出模型
1 安装
git clone https://github.com/sunsmarterjie/yolov12cd yolov12conda create -n yolov12 python=3.11# 输入y,继续。激活环境。conda activate yolov12pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simplepip install -e .2 配置文件
- rtdetr-l.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license# Ultralytics RT-DETR-l hybrid object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/rtdetr
# Task docs: https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]l: [1.00, 1.00, 1024]backbone:# [from, repeats, module, args]- [-1, 1, HGStem, [32, 48]] # 0-P2/4- [-1, 6, HGBlock, [48, 128, 3]] # stage 1- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8- [-1, 6, HGBlock, [96, 512, 3]] # stage 2- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P3/16- [-1, 6, HGBlock, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut- [-1, 6, HGBlock, [192, 1024, 5, True, True]]- [-1, 6, HGBlock, [192, 1024, 5, True, True]] # stage 3- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P4/32- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4head:- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2- [-1, 1, AIFI, [1024, 8]]- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0- [-1, 1, Conv, [256, 1, 1]] # 17, Y4, lateral_convs.1- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1- [-1, 1, Conv, [256, 3, 2]] # 22, downsample_convs.0- [[-1, 17], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0- [-1, 1, Conv, [256, 3, 2]] # 25, downsample_convs.1- [[-1, 12], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
- rtdetr-resnet50.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license# Ultralytics RT-DETR-ResNet50 hybrid object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/rtdetr
# Task docs: https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]l: [1.00, 1.00, 1024]backbone:# [from, repeats, module, args]- [-1, 1, ResNetLayer, [3, 64, 1, True, 1]] # 0- [-1, 1, ResNetLayer, [64, 64, 1, False, 3]] # 1- [-1, 1, ResNetLayer, [256, 128, 2, False, 4]] # 2- [-1, 1, ResNetLayer, [512, 256, 2, False, 6]] # 3- [-1, 1, ResNetLayer, [1024, 512, 2, False, 3]] # 4head:- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 5- [-1, 1, AIFI, [1024, 8]]- [-1, 1, Conv, [256, 1, 1]] # 7- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 9- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [256]] # 11- [-1, 1, Conv, [256, 1, 1]] # 12- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [2, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [256]] # X3 (16), fpn_blocks.1- [-1, 1, Conv, [256, 3, 2]] # 17, downsample_convs.0- [[-1, 12], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [256]] # F4 (19), pan_blocks.0- [-1, 1, Conv, [256, 3, 2]] # 20, downsample_convs.1- [[-1, 7], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [256]] # F5 (22), pan_blocks.1- [[16, 19, 22], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
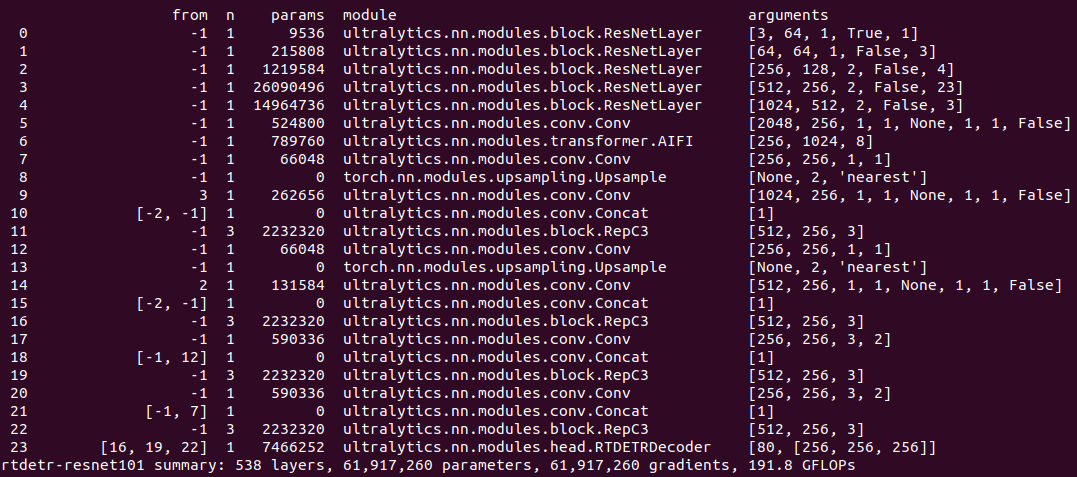
- rtdetr-resnet101.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license# Ultralytics RT-DETR-ResNet101 hybrid object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/rtdetr
# Task docs: https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]l: [1.00, 1.00, 1024]backbone:# [from, repeats, module, args]- [-1, 1, ResNetLayer, [3, 64, 1, True, 1]] # 0- [-1, 1, ResNetLayer, [64, 64, 1, False, 3]] # 1- [-1, 1, ResNetLayer, [256, 128, 2, False, 4]] # 2- [-1, 1, ResNetLayer, [512, 256, 2, False, 23]] # 3- [-1, 1, ResNetLayer, [1024, 512, 2, False, 3]] # 4head:- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 5- [-1, 1, AIFI, [1024, 8]]- [-1, 1, Conv, [256, 1, 1]] # 7- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 9- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [256]] # 11- [-1, 1, Conv, [256, 1, 1]] # 12- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [2, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [256]] # X3 (16), fpn_blocks.1- [-1, 1, Conv, [256, 3, 2]] # 17, downsample_convs.0- [[-1, 12], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [256]] # F4 (19), pan_blocks.0- [-1, 1, Conv, [256, 3, 2]] # 20, downsample_convs.1- [[-1, 7], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [256]] # F5 (22), pan_blocks.1- [[16, 19, 22], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
- rtdetr-x.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license# Ultralytics RT-DETR-x hybrid object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/rtdetr
# Task docs: https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]x: [1.00, 1.00, 2048]backbone:# [from, repeats, module, args]- [-1, 1, HGStem, [32, 64]] # 0-P2/4- [-1, 6, HGBlock, [64, 128, 3]] # stage 1- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8- [-1, 6, HGBlock, [128, 512, 3]]- [-1, 6, HGBlock, [128, 512, 3, False, True]] # 4-stage 2- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 5-P3/16- [-1, 6, HGBlock, [256, 1024, 5, True, False]] # cm, c2, k, light, shortcut- [-1, 6, HGBlock, [256, 1024, 5, True, True]]- [-1, 6, HGBlock, [256, 1024, 5, True, True]]- [-1, 6, HGBlock, [256, 1024, 5, True, True]]- [-1, 6, HGBlock, [256, 1024, 5, True, True]] # 10-stage 3- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 11-P4/32- [-1, 6, HGBlock, [512, 2048, 5, True, False]]- [-1, 6, HGBlock, [512, 2048, 5, True, True]] # 13-stage 4head:- [-1, 1, Conv, [384, 1, 1, None, 1, 1, False]] # 14 input_proj.2- [-1, 1, AIFI, [2048, 8]]- [-1, 1, Conv, [384, 1, 1]] # 16, Y5, lateral_convs.0- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [10, 1, Conv, [384, 1, 1, None, 1, 1, False]] # 18 input_proj.1- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [384]] # 20, fpn_blocks.0- [-1, 1, Conv, [384, 1, 1]] # 21, Y4, lateral_convs.1- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [4, 1, Conv, [384, 1, 1, None, 1, 1, False]] # 23 input_proj.0- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [384]] # X3 (25), fpn_blocks.1- [-1, 1, Conv, [384, 3, 2]] # 26, downsample_convs.0- [[-1, 21], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [384]] # F4 (28), pan_blocks.0- [-1, 1, Conv, [384, 3, 2]] # 29, downsample_convs.1- [[-1, 16], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [384]] # F5 (31), pan_blocks.1- [[25, 28, 31], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
3 训练
yolo detect train data=coco128.yaml model=cfg/models/rt-detr/rtdetr-resnet50.yaml epochs=100 batch=16 imgsz=640 device=cpu 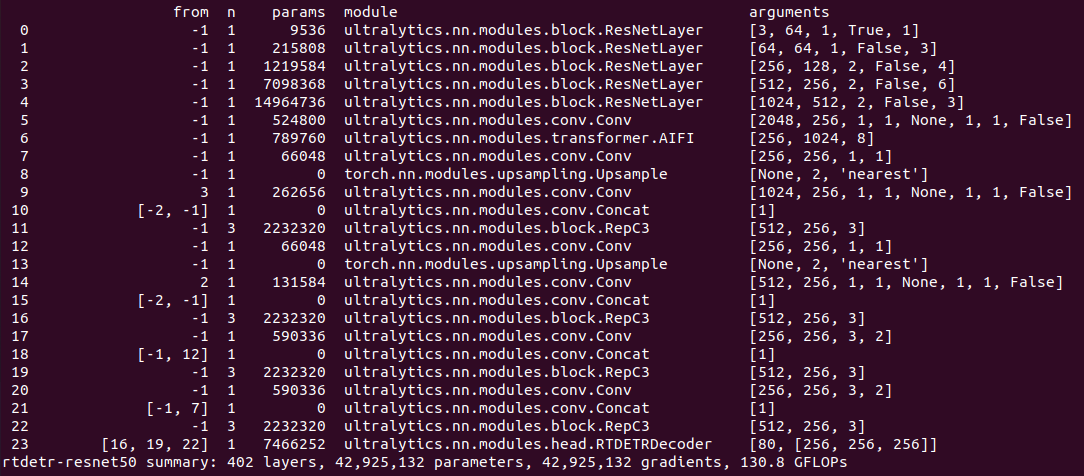
4 推理
yolo task=detect mode=predict model=best.pt source=test.jpg device=cpu5 验证
yolo task=detect mode=val model=best.pt data=coco128.yaml device=cpu6 导出模型
yolo task=detect mode=export model=best.pt format=onnx 至此,本文的内容就结束了。