1.1 点云数据获取方式——引言
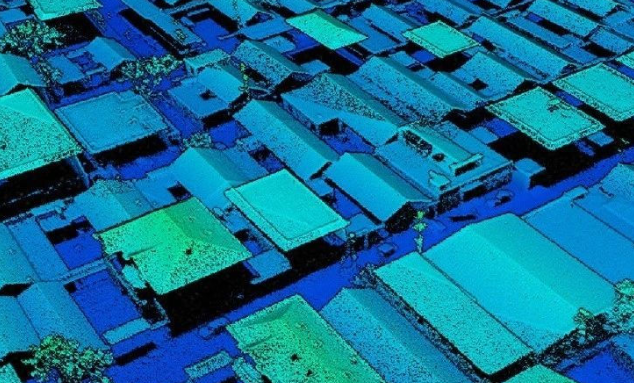
图1-1-1点云建筑场景图
点云数据是指能够描述外部场景、对象表面的三维空间位置,并具有相关属性的点集,其每个离散点通常包括三维空间位置(x,y,z)以及强度、颜色等属性信息。大量分布的离散点集能够清晰而直接地描绘场景、对象的3D形状,通过不同属性进行点云赋色渲染从而提升其3D可视化效果。如下列图集所示:
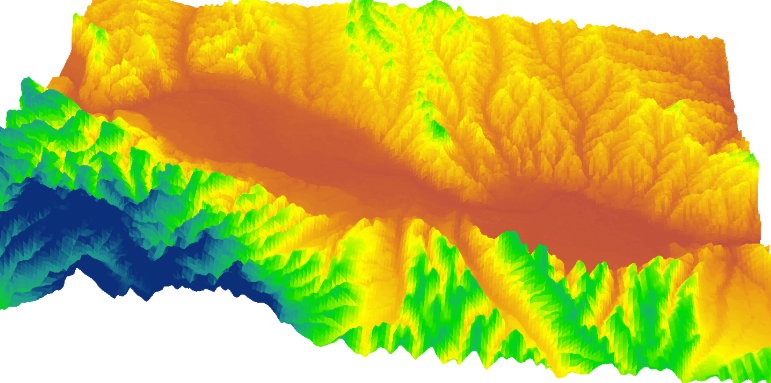
图1-1-2地形图(高程赋色)
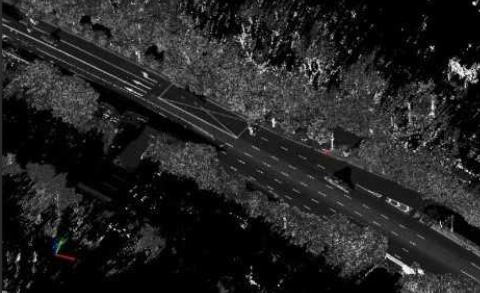
图1-1-3道路点云图(强度赋色)
 图1-1-4野外电力线点云图(RGB赋色)
图1-1-4野外电力线点云图(RGB赋色)
而点云数据的获取,通常有如下几项手段:①基于主动扫描设备获取,比如激光雷达、ToF相机、结构光相机;②基于被动式手段获取,例如基于单目相机的多视几何原理生成的重建点云,利用双目立体几何的双目相机,以及基于单目相机的视觉slam获取的3D建图结果。