近地卫星网络 (Low Earth Orbit Satellite Networks)入门学习笔记
一、卫星网络的动态拓扑
1. 1 星间网络体系架构
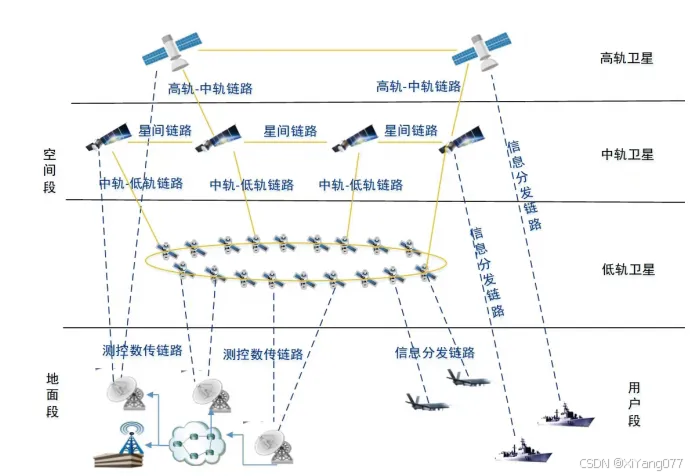
典型的大规模星座网络系统包括空间段、地面段和用户段3个部分。大规模星座通过星间链路、星地测控数传链路、跨域互联链路、信息分发链路等多种通信链路形式,将空间段、地面段和用户段的各类节点连接在一起,构成空天地一体化的信息传输网络,实现大规模星座的网络化传输,为各类用户提供宽带接入、移动通信、数据中继、万物互联等信息服务。
空间段由高中低轨卫星和星间链路组成,卫星规模可以从数十颗到数万颗,通过微波或激光星间链路技术将高中低轨卫星相互连接,并采用星上信息处理和路由转发方式,构成一个以卫星为交换节点的空间传输网络。此外,空间段可通过部分卫星节点的激光或微波链路,与其他星座系统进行异构跨域互联,支持跨星座信息传输。
地面段包括信关站、运控管理中心、地面网络设施等功能实体。信关站是连接卫星网络和地面网络的网关节点,具备通过多个波束接入可视范围内多颗卫星的能力,卫星数据经信关站接入地面网络,完成星地通信协议的转换,从而实现星地一体化网络互联。运控管理中心负责管理卫星星座、信关站和地面网络设施等,对全星座网络资源进行综合管理和监控。
参考文献:面向大规模星座的星间组网技术研究
1.2 静态拓扑结构
卫星网络拓扑也即我们所说的星间链路,其拓扑结构显示了卫星在轨的位置及其与其他卫星节点之间的相互关系。
卫星网络常见的静态拓扑主要包括星形拓扑、环形拓扑、曼哈顿网络、筒形网络和花环形网络
曼哈顿网络、筒形网络和花环形网络
现代卫星网络常采用混合拓扑(如星形+曼哈顿),结合静态规划与动态路由协议(如DTN)以适应动态环境。
1.3 动态拓扑结构
卫星网络的动态拓扑是指由于卫星的高速运动、轨道变化和星间链路切换导致的网络拓扑结构不断变化的特性。与静态拓扑相比,动态拓扑更适用于低轨(LEO)巨型星座或移动卫星系统,需要实时调整链路和路由策略。
在卫星星座网络中,每颗卫星的天线数量有限,因此无法与所有可见的卫星同时建立链路。网络拓扑优化的目标是从所有可见的卫星中,选择最优的链路连接方案,以提高整体网络的通信效率,如降低延迟、增强连通性或优化路由性能。
对于低轨卫星星座的动态拓扑研究来说,理论上最常见的连接策略有两大类,分别是以最短距离或最长可视时间作为节点互联依据。
- 最短距离考虑的是节点与节点间的传播时延,选择与本节点距离最短的节点进行连接可保证相邻两节点之间进行信息传输所需的时延最短,但这样会导致星座的拓扑状态频繁中断切换,从而导致大量的资源开销。
- 最长可视时间则是出于对整个卫星星座的稳定性的考虑,选择与本节点具有最长可视时间的节点进行连接,可以保证整个星座的拓扑变化保持在最小程度,但这种考量之下,长程信息传输时的时延会极具增大。
因此也有方案探讨综合两类因素,设置权重因子,将时延及可视时长皆纳入考量范围。同时,也有将节点可用资源纳入节点连接的考量范围的。
参考文献:
[1] 基于StarLink的卫星网络拓扑与路由研究 DOI:10.26944/d.cnki.gbfju.2023.003250
[2]低轨道卫星星座的拓扑结构设计 DOI: 10.26944/d.cnki.gbfju.2021.002568
卫星通信网络采用动态网状拓扑,每颗卫星可与相邻卫星建立激光链路(ISL, Inter-Satellite Link),具体分为:
- 轨道内ISL(同轨道卫星间):
- 卫星相对静止,链路永久稳定(如Starlink星座中同轨道卫星间距约50km)。
- 每颗卫星默认与同轨道前后两颗卫星建立永久连接(共2条)。
- 轨道间ISL(不同轨道卫星间):
- 相邻轨道ISL:轨道间距较近(如500km内),链路半永久性(受轨道漂移影响)。
- 交叉轨道ISL:轨道面倾角不同,链路临时性(需动态建立,如极地卫星与赤道卫星通信)。
| 链路类型 | 稳定性 | 典型距离 | 适用场景 |
|---|---|---|---|
| 同轨道ISL | 永久稳定 | 50~100 km | 轨道内数据同步 |
| 相邻轨道ISL | 半永久性 | 200~500 km | 轨道间协作修复 |
| 交叉轨道ISL | 临时性(需重配) | 500~2000 km | 跨区域紧急数据传输 |

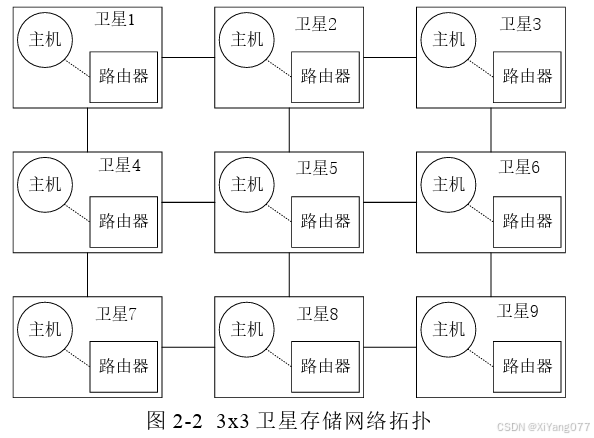
每颗卫星作为主机(Host)(存储/计算)和路由器(Switch)(数据转发)。 永久链路:同轨道2条 + 相邻轨道2条(共4条);临时链路通过多跳中继实现。
参考文献:基于聚合编码的卫星存储网络文件修复策略研究
案例1:亚马逊 Kuiper Systems
轨道构型
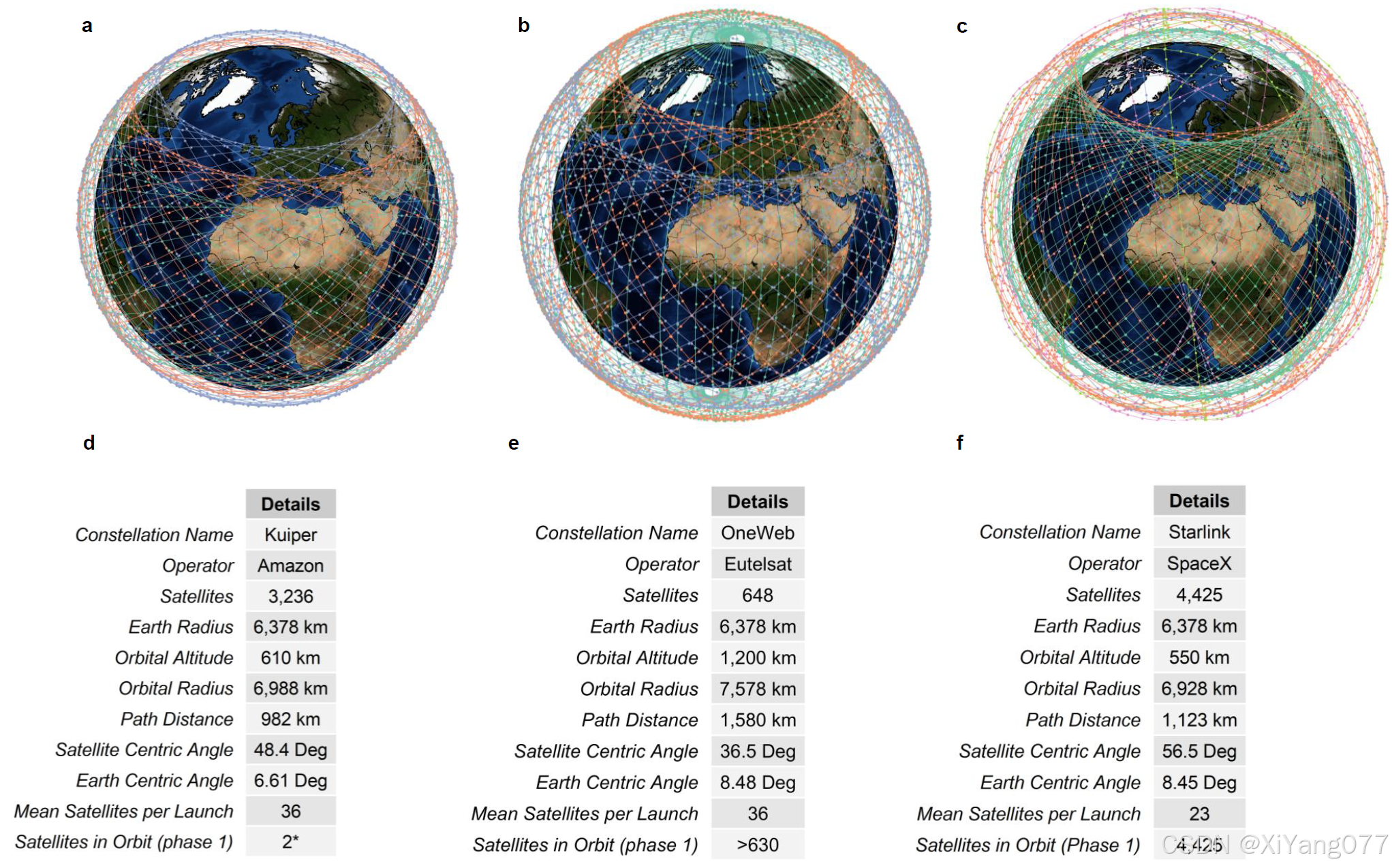
- 轨道高度:590 km、610 km、630 km(三个轨道层)。
- 轨道倾角:51.9°(中纬度覆盖)、33°(赤道增强)、98°(极地补充)。
- 卫星数量:3,236 颗(分三层部署)。
拓扑结构
- 动态混合网格(Hybrid Mesh):
- 层内拓扑:类似 曼哈顿网络(Manhattan Grid),卫星与同轨道面内的前后邻居以及相邻轨道面的左右邻居建立 星间链路(ISL),形成网格状连接。
- 层间拓扑:不同高度的卫星可能通过 跨层链路(Inter-layer ISL) 连接,优化全球覆盖和延迟。
- 特点:
- 强调 低延迟通信(与AWS云服务整合)。
- 采用 激光星间链路(Optical ISL) 提高带宽和抗干扰能力。
- 可能结合 SDN(软件定义网络) 动态管理链路。
案例2:欧洲通信卫星集团 OneWeb
轨道构型
- 轨道高度:1,200 km(初始星座)。
- 轨道倾角:87.9°(近极地轨道)。
- 卫星数量:648 颗(18个轨道面,每面36颗卫星)。
拓扑结构
- 极地环形+有限星间链路(Polar Ring with Selective ISL):
- 层内拓扑:同轨道面内卫星形成 环形链路(Intra-plane Ring),保证连续覆盖。
- 层间拓扑:早期版本 未部署星间链路(ISL),依赖地面站中继;后续计划增加 激光ISL,但连接方式较Starlink更稀疏。
- 特点:
- 初始设计 依赖地面网关(需全球建站)。
- 新卫星可能支持 动态选择性ISL,但拓扑灵活性低于Starlink。
- 优化 极地覆盖(适合航空、海事等应用)。
案例3:SpaceX Starlink
轨道构型
- 轨道高度:340 km(VLEO)、550 km(主要层)、1,100 km(部分)。
- 轨道倾角:53°(主星座)、70°、97.6°(极地补充)。
- 卫星数量:已发射超5,000颗(目标约12,000颗)。
拓扑结构
- 动态曼哈顿网格(Dynamic Manhattan Grid):
- 层内拓扑:每颗卫星与 同轨道面前后4颗 和 相邻轨道面左右4颗 卫星建立 激光ISL,形成 4连接网格。
- 层间拓扑:不同高度卫星间可能建立 垂直ISL(如VLEO与550 km层)。
- 特点:
- 高度动态自组织网络,链路随卫星运动自动切换。
- 全球低延迟覆盖(激光ISL延迟约光速的50%)。
- 采用 自主避碰和路由算法(AI优化)。
三个案例的拓扑对比
| 星座 | Kuiper (Amazon) | OneWeb | Starlink (SpaceX) |
|---|---|---|---|
| 拓扑类型 | 动态混合网格 | 极地环形+有限ISL | 动态曼哈顿网格 |
| ISL技术 | 激光链路 | 激光链路(后期) | 激光链路(全时) |
| 覆盖重点 | 全球+AWS整合 | 极地+专业客户 | 全球消费者宽带 |
| 动态性 | 中高(SDN管理) | 低(依赖地面站) | 极高(自主切换) |
| 延迟优化 | 是(云服务优先) | 中等 | 是(全球低延迟) |
参考文献:Sustainability assessment of Low Earth Orbit (LEO) satellite broadband megaconstellations
二、卫星网络的算力网络
通过对闲散计算资源的统一管理和调度,算力网络技术可将分散的计算节点通过网络连接,构建统一资源池,进行计算资源的动态编排管理,并将融合计算资源提供给定制化服务或需求,从而实现资源的高效利用和按需分配。
2.1 算力网络的发展现状与标准化进展
算力网络的应用场景广泛,但目前仍处于概念落地阶段,尚未形成统一的节点部署规则、流量分配机制和任务调度协议。多个组织正致力于推动标准化,已提出一些有影响力的框架,例如:
- ETSI的MEC标准(多接入边缘计算)
- OpenFog联盟的OpenFog框架(雾计算架构)
- Linux基金会的EdgeXFoundry(物联网边缘计算)
- ECC(边缘计算产业联盟)的边缘计算参考架构
融合卫星网络的算力网络规划调度机制的研究与实现
DOI: 10.26969/d.cnki.gbydu.2024.001619
2.2 算力网络的典型通用架构
该架构通常分为三层:
- 用户层:终端设备(如IoT设备、移动终端)发起计算任务请求。
- 网络边缘层:部署边缘计算节点(MEC、雾计算),提供低延迟计算能力。
- 云计算层:集中式数据中心,处理高算力需求任务。
2.3 算力网络的关键技术
- 算力感知与资源调度:动态分配计算任务至最优节点(边缘或云端)。
- 任务迁移与协同计算:支持跨节点任务调度,优化全局算力利用率。
- 网络-计算融合:结合SDN/NFV技术,实现灵活的资源编排。
融合卫星网络的算力网络规划调度机制的研究与实现
DOI: 10.26969/d.cnki.gbydu.2024.001619
三、卫星网络的存储
基于聚合编码的卫星存储网络文件修复策略研究
四、卫星网络的带宽
卫星网络的带宽是指卫星通信系统能够传输数据的速率和能力。卫星网络的带宽通常以兆比特每秒(Mbps)或吉比特每秒(Gbps)为单位进行衡量。
在技术层面,信道调制与编码、高频段使用和多点波束技术均可提升卫星信道容量,但最具突破性的是多点波束技术。它借鉴蜂窝网络思路,将覆盖区划分为多个小区域,通过频率复用大幅提高系统容量。单星传输能力因此从传统卫星的2 Gbps跃升至高通量卫星的20–500 Gbps,推动了机载、船载等大带宽应用。这一技术不仅用于地球同步轨道卫星,也广泛应用于低轨(如Starlink)和中轨(如O3b)星座。
五、卫星网络的时延(拓扑评价指标)
在卫星通信中,时延主要由以下四部分组成:
- 传播时延:信号在星间或星地链路的传输时间(与距离相关)
- 发送时延:数据从节点发送到链路上的时间(与带宽相关)
- 排队时延:数据在节点缓冲区的等待时间(与网络拥塞相关)
- 处理时延:节点计算和转发数据的时间(与星上算力相关)
在整个星座中, 各卫星节点的算力应当是样的, 因此, 我们在进行拓扑结构的制定时, 需要考虑的是传播时延以及排队时延和处理时延。
拓扑优化可以从以下三要素入手
| 优化维度 | 说明 | 影响 |
|---|---|---|
| 链路长度 | 选择物理距离最近的节点 | 降低传播时延 |
| 跳数 | 减少端到端转发次数 | 降低排队/处理时延 |
| 链路生存期 | 优先选择连接稳定的链路 | 减少重连开销 |
参考文献:
基于StarLink的卫星网络拓扑与路由研究 DOI:10.26944/d.cnki.gbfju.2023.003250
六、卫星网络的路由
卫星网络路由算法主要分为两种:
-
基于虚拟拓扑的路由
- 将动态网络划分为多个静态时间片,每个时间段内拓扑固定。
- 优点:减少路由切换频率,降低计算开销,适合可预测的星座(如Starlink)。
- 缺点:灵活性较低,难以适应突发变化。
-
基于动态拓扑的路由
- 实时更新路由表,适应网络变化(如链路断开、新卫星加入)。
- 优点:适应性强,适合高动态环境。
- 缺点:计算和通信开销大,对卫星算力要求高。
关键问题:如何在低开销和高适应性之间取得平衡?
研究方向:混合路由策略、轻量化动态算法、AI预测优化等。
参考文献:
[1] 基于StarLink的卫星网络拓扑与路由研究 DOI:10.26944/d.cnki.gbfju.2023.003250