平衡二叉搜索树
在STL关联式容器介绍-CSDN博客中对二叉搜索树做了简要的描述;但是因为没有对二叉搜索树对数的深度及插入后树的结构进行调整,二叉搜索树可能失去平衡,造成搜寻效率低落的情况。如下所示:

所谓树形平衡与否,并没有一个绝对的测量标准。“平衡”的大致意义是:没有任何一个节点过深(深度过大)。不同的平衡条件,造就不同的效率表现,以及不同的实现复杂度。有数种特殊结构如AVL-tree、RB-tree、AA-tree,均可实现出平衡二叉搜索树,它们都比一般的(无法绝对维持平衡的)二叉搜索树复杂,因此,插入节点和删除节点的平均时间也比较长,但是它们可以避免极难应付的最坏(高度不平衡)的情况,而且由于它们总是保持某种程度的平衡,所以元素的访问(搜寻)时间平均而言也就比较少。
AVL tree(Adelson-Velskii-Landis tree)
Adelson-Velskii-Landis树(AVL树)是由苏联数学家乔治·阿德尔森-维尔斯基(Georgy Adelson-Velskii)和叶夫根尼·兰迪斯(Evgenii Landis)于1962年提出的。它们首次在一篇论文《An algorithm for the organization of information》中介绍了这一数据结构,目的是为了提高二叉搜索树的效率。
AVL tree是一个"加上了额外平衡条件"的二叉搜索树。其平衡条件的建立是为了确保整棵树的深度为O(logN)。直观上的最佳平衡条件是每个节点的左右子树有着相同的高度,但未免太过严苛,我们很难插入新元素而又保持这样的平衡条件。AVL tree于是退而求其次,要求任何节点的左右子树高度相差最多为1.这是一个较弱的条件,但仍能够保证“对数深度”平衡状态。
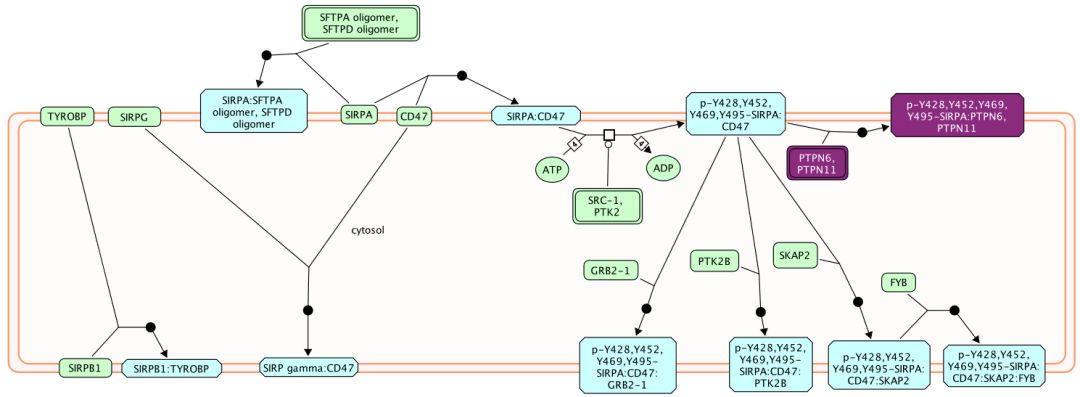
下面来看一个满足AVL条件的二叉搜索树;

该树的任意节点的左右子树的高度差都没超过1。
不过此时如果插入节点11,如下图所示

插入节点11后,22节点对应左右子树的高度分别为4和2,18节点左右子树高度分别为2和1,所以该树已经不再满足AVL的特性;需要对其进行调整以满足AVL特性;
前面说过,只要调整“插入节点到根节点”路径上,平衡状态被破坏之各节点中最深的那一个,便可使整棵树重新获得平衡。假设该最深节点为X;
现在根据插入节点与不满足条件的X节点的位置关系不同分成四种情况,而后根据这四种情况采用不同的调整方法:
1.插入点位于X的左子节点的左子树--左左
2.插入点位于X的左子节点的右子树--左右
3.插入点位于X的右子节点的左子树--右左
4.插入点为于X的右子节点的右子树--右右
情况1,4彼此对称,称为外侧插入,可以采用单旋转操作调整解决。情况2,3彼此对称,可以采用双旋转操作调整解决。
下图为外侧示例:

下图为内侧示例:

单旋转
在外侧状态下,如下图所示:

在外侧插入情况下,k2“插入前平衡,插入后不平衡”的唯一情况如上图所示。A子树成长了一层,致使它比C子树深度多2.B子树不可能和A子树位于同一层,否则k2在插入前就处于不平衡状态了。B子树也不可能和C子树位于同一层,否则第一个违反平衡条件的将是k1而不是k2.
为了调整平衡状态,我们希望将A子树提高一层,并将C子树下降一层,调整后如下图所示:

这么做是因为,二叉所搜树的规则使我们知道,k2>k1,所以k2必须成为新树形k1的右子节点。二叉树的规则也告诉我们B子树的所有节点的键值是在k1和k2之间,所以新树形中的B子树必须落在k2的左侧。
以上所有调整都只需要将指针稍作搬移,即可高效完成。完成后的新树形符合AVL的平衡条件,不需要再调整。
对于右右的外侧插入,可以采用类似的方法完成。
双旋转

上图所示,左侧为内侧插入所造成的不平衡状态。单旋转无法解决这种情况。第一,我们不能再以k3为根节点,其次,我们不能将k3和k1做一次单旋转,因为旋转之后,还是不平衡。(以此方式旋转,k1,成为父节点,其左节点高度为1,右节点高度将是3)。唯一的可能是以k2为新的根节点。这使得k1,必须成为k2的左子节点,k3必须成为k2的右子节点。这么一来也就决定了四个子树的位置。新的树形满足AVL-tree的平衡条件,并且像单旋转的情况一样,恢复了节点插入之前的高度,因此保证不需要再做调整。
其旋转过程经历了两次单旋转;如下所示;首先对k1,k2做一次单旋转得到如下所示树形:

而后针对k3,k2做一次单旋,其树形如下所示:

RB-tree是另一个被广泛使用的平衡二叉树,也是SGI STL唯一实现的一种搜索树,作为关联式容器的底部机制使用。TB-tree的平衡条件不同于AVL-tree,但同样运用了单旋转和 双旋转的修正操作。下一节,我们将再对RB-tree进行学习。
参考文档《STL源码剖析--侯捷》