【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
在ros的机器人学习过程中,有一件事情是肯定少不了的。那就是坐标系的转换。其实这也很容易理解。假设有一个机器人,它有一个3d camera、有一个机械手臂。这个时候有一个需求,需要通过3d camera告知物体的位置,然后通知另外一个机械手臂取走。
看上去这个任务很简单,但是这中间就涉及到了坐标系的转换。比如说,摄像头识别到物体,这个时候物体是摄像头坐标系下的一个pose,需要通过robot1坐标系、全局坐标系的转换关系,进一步变成世界坐标系下的位置。这样,camera看到的物体pose,就有一个全局pose信息,虽然还是同一个物品。
那么这个物体的位姿信息怎么通知到机械手臂呢?那么又需要进行反向的坐标系转换。即将物体的全局pose,转成robot2坐标系下的pose,然后进一步转换成机械手臂下的局部pose。这样机械手臂,就可以根据这个局部的pose信息,实现物体的抓取了。

1、tf的作用
tf的主要作用,其实就是实现坐标系的转换。它的作用,有可能是局部坐标系到世界坐标系,也有可能是世界坐标系到局部坐标系。

2、tf的主要构成
坐标系的主要沟通有两部分,一部分是xyz,一部分是围绕xyz坐标轴的旋转。其中xyz就是直接用浮点数表示,旋转一般用xyzw的四元数来表示。如果要转成rpy的角度转换,需要用tf提供的公式转换一下。
3、tf的计算方法
目前计算的方法很多,不过主要还是利用矩阵计算,如果是计算一个点在另外一个坐标系下的坐标,过程中仅仅涉及到旋转的话,一般是
中间如果涉及到位移的话,一般还会添加一个offset,
这样的公式虽然比较简单,但是转成矩阵不太方便,我们可以通过补齐1来处理,
这样看上去公式完美一些了,可以进一步简化一下,
公式上面似乎回到了原点,但是每一个变量的含义其实都发生了改变。当然,这里的R仅仅表示P0到P1的转变。很多人也许会问了,如果是P1到P0的转变,这个时候应该怎么处理呢。这个时候矩阵的优势就发挥出来了,
所以,如果是需要P1坐标系下面的一个点,此时需要秀姐P0坐标系下的坐标,它所需要的就是求解旋转矩阵R的逆即可。有了单一的坐标转换,那么连续的坐标转换就变得容易了,
反之也是一样,
4、tf中的静态消息和动态消息
坐标系转换中,有的是静态转换,有的是动态转换。所谓的静态转换,就是那种确定了之后,就一直不变化的。比如传感器和robot之间的固定位置。还有一种就是动态变换,它所指向的就是那种一直在变化的坐标映射关系,比如robot和map之间的位置转换关系。
5、amcl举例说明
关于amcl算法,大家可以参考这个链接http://wiki.ros.org/amcl。在这中间就包含了大家想学习的tf信息。

根据输入,它所以依赖的消息有scan雷达、tf坐标系转换、初始位置、map地图四个数据。第1、3、4都比较好理解。而第2个数据就和今天学习的知识相关,包含了lidar到robot、robot到odom的转换等。一开始的时候,我们还在寻找算法里面怎么没有里程计odom的数据,其实答案就在tf里面。
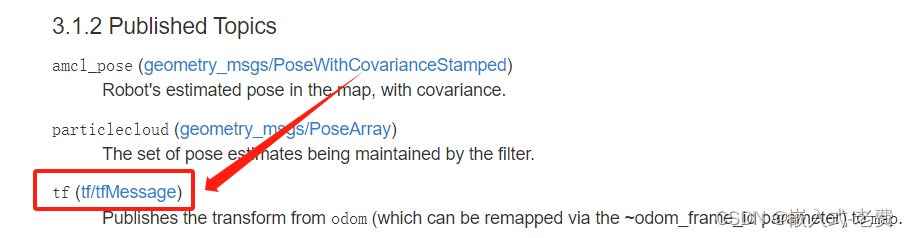
经过算法求解,这个时候会输出三种数据,分别是amcl位姿、粒子云和tf。第1、2都比较好理解,还有一个tf数据。根据英文解释,它发布的就是map坐标系下odom的里程数据。
6、tf的编程接口
了解一些tf的编程接口,也对我们理解和认识tf很有帮助。如果是tf的发布,一般会涉及到这样的接口,
tf::TransformBroadcaster
tf::Transform
tf::Quaternion相反,如果是一些接收的接口,也会有一些tf的数据结构,
tf::TransformListener
geometry_msgs::PointStamped


![[docker]笔记-网络故障处理](https://img-blog.csdnimg.cn/dc49e93e7b8b4f64bc95be95f3c285d0.png)