ARM64汇编基础
主要内容
到目前为止,大部分的移动设备都是64位的arm架构,一直想抽个时间系统学习下,这个周末就专门来学习下。毕竟两天的时间,也只是简单的入门了解下,为后续工作和学习打下基础。
本次学习的主要内容包括寄存器、指令系统以及堆栈函数相关的知识,了解这些知识后,后面就可以扩展进行学习了。话不多说,接下来介绍这两天的学习内容。
主要的寄存器
学习任何一门汇编语言,可能都需要了解有哪些寄存器。Arm64主要有以下几类寄存器。
- 通用寄存器
通用寄存器包括64位的x0~x28,32位的版本叫做w0~28。w0~28是x0~x28的低32位版本。
X0~x7通常用来存储函数参数,更多的参数通过栈来传递,x0用作返回值。
- 程序寄存器
程序寄存器也叫程序计数器,记录CPU当前执行的是哪条指令,换句话说就是存储这当前cpu正在执行的指令地址。类似于x86汇编的eip寄存器。
- 堆栈指针寄存器
这类寄存器包括两个,一个是叫做sp(stack pointer),另一个叫做fp(frame pointer),也就是x29。这两个寄存器指向的地址确定了当前函数可以访问的栈空间大小。
- 链接寄存器
lr(Link Register),也就是x30,它的作用就是存储着函数的返回地址。
- 程序状态寄存器
cpsr(Current Program Status Register),顾名思义就是记录者程序中的一系列状态。例如cmp指令结束后将比较结果存储在这个寄存器相关的标志位中。Cpsr寄存器的标志位布局如下图所示:

- 零寄存器
wzr 32位
xzr 64位,这两个寄存器中都是存储的0,用来清零操作,如指针和其它类型的变量清零。
调试方法
前面介绍了主要的寄存器后,我们简单介绍下调试方法,对主要的寄存器以及内存有初步的了解。由于本人相对对于lldb比较了解一点,就使用lldb为例。
- 查看寄存器
register read 查看所有寄存器
register read x0
register read w0 查看x0的低32位版本
register write x0 0x6388 往寄存器x0写入0x6388
- 查看变量的地址
p &a 查看变量a对应的内存地址
- 查看地址的内存数据
x &a 查看变量a对应地址内存地址的内容
x 0x3442 查看地址0x3442的内容
- 单步调试
si
- 逐指令调试
si
- 继续执行
c
主要的指令
arm64的指令包括所有变种的话非常多,因为我是主要关注软件方面,嵌入式方面不了解,所以个人觉得了解的指令不需要太多酒可以了。
- ret指令
函数返回,它的本质是将lr寄存器赋值到pc寄存器。
- mov指令
数据传送指令,mov指令只能操作寄存器,例如mov x1, x0
- add和sub
加法和减法,比较简单
- b和bl指令
b指令是无条件跳转,b指令也可以带上条件,如EQ\NE\GT\LT,根据cpsr寄存器中的标志为决定是否跳转。
Bl指令是带返回的跳转指令,它所做的事情如下:
- 将下一条指令的地址存储到lr(x30)寄存器中
- 跳转到标记处开始执行代码
- cmp指令
cmp指令比较两个寄存器中值的大小,比较的结果影响cpsr寄存器中相关的标记位。如N和Z位。例如:
cmp x0, x1
- 内存加载指令,ldr,ldur ,ldp
将内存中的数据加载到寄存器中,如
ldr x0, [x1]
ldur x0, [x1, #0x4]
ldur x0, [x1, #0x4]!
ldur x0, [x1] , #0x4!
ldur x0, [x1,x2]
一般情况下,ldr用于正向的偏移地址,ldur用于负向的偏移地址
ldp ,p是pair的意思。
- 内存存储指令,str, stur, stp
将寄存器的值写入内存的指令,用法和ldr指令类似。
C函数的实现
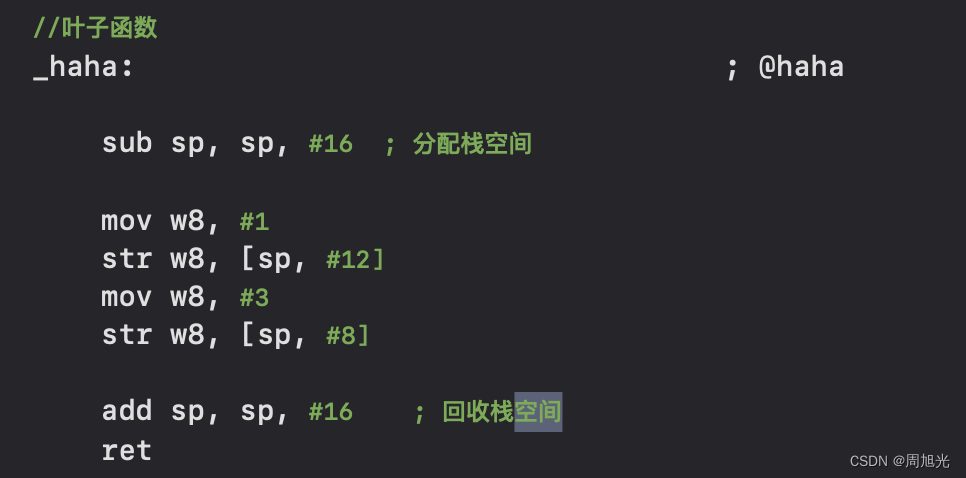
C语言函数实现,分为叶子函数和非叶子函数,函数的参数和返回值前面的通用寄存器已经介绍,现在是介绍叶子和非叶子函数的实现。
叶子函数指没有调用其它函数的函数。叶子函数开头是分配函数的栈空间,结束的时候回收栈空间,一个典型的过程如下:
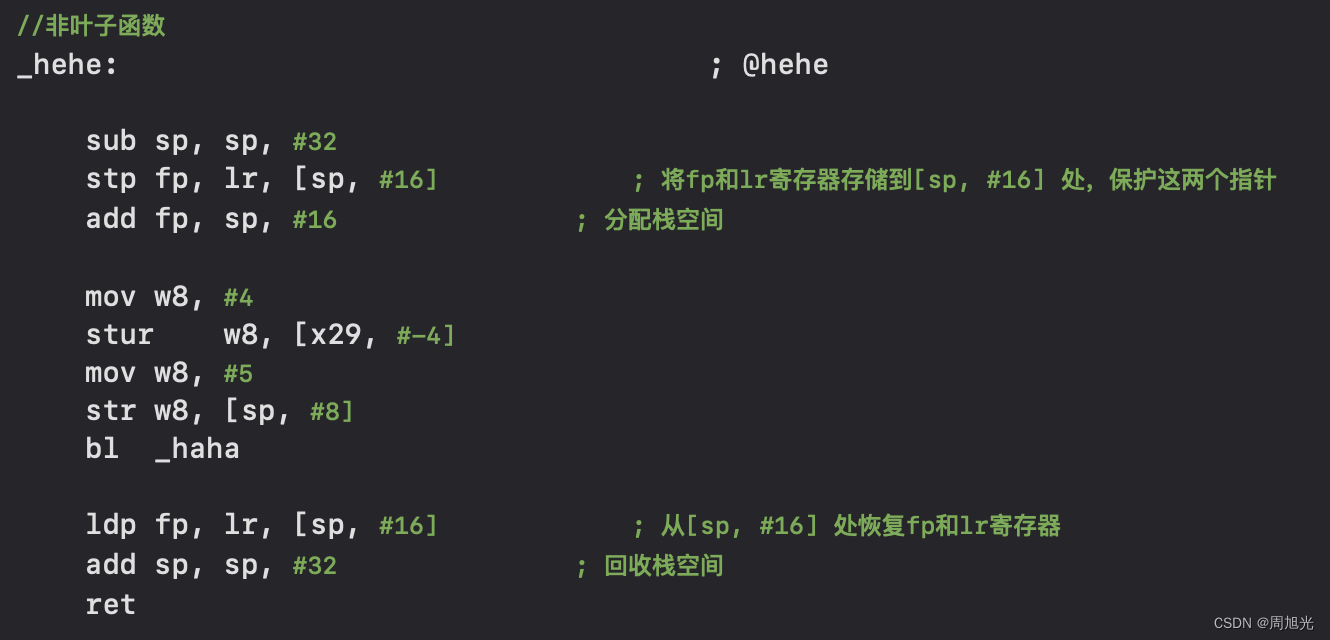
非叶子函数指中间有调用其它函数的函数,一个典型的叶子函数如下所示:
至此,arm64汇编的基础知识就介绍完毕,相信有了这些基础之后,后面的工作和学习会更有针对性的去查相关资料。