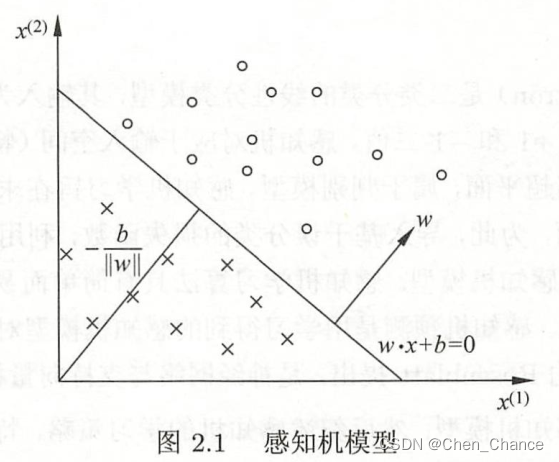
感知机(perceptron)时二类分类的线性分类模型,其输入为实例的特征向量,输出为实例的类别,取+1和-1二值。感知机对应于输入空间(特征空间)中将实例划分为正负两类的分离超平面
想象一下在一个平面上有一些红点和蓝点,这些点代表不同的类别。分离超平面就是一条线,可以将红点和蓝点分开,使得所有的红点都在一侧,而蓝点都在另一侧。这条线(或者平面,对于高维数据)被称为分离超平面。
2.1感知机模型
定义2.1(感知机):假设输入空间(特征空间)是 X ⊆ R n X \subseteq R^n X⊆Rn,输出空间是 Y = { + 1 , − 1 } Y=\{+1,-1\} Y={+1,−1}。输入 x ∈ X x \in X x∈X表示实例的特征向量,对应于输入空间(特征空间)的点;输出 y ∈ Y y \in Y y∈Y表示实例的类别。由输入空间到输出空间的如下函数:
f ( x ) = s i g n ( w ⋅ x + b ) f(x)=sign(w \cdot x+b) f(x)=sign(w⋅x+b)
称为感知机。其中,w和b为感知机模型参数, w ∈ R n w \in R^n w∈Rn叫做权重(weight)或权重向量(weight vector), b ∈ R b \in R b∈R叫做偏置(bias), w ⋅ x w \cdot x w⋅x表示w和x的内积。sign是符号函数,即
s i g n ( x ) = { + 1 x ≥ 0 − 1 x < 0 sign(x)=\begin{cases} +1 & x≥0 \\ -1 & x<0 \\ \end{cases} sign(x)={+1−1x≥0x<0
内积是线性代数中的一个概念,也被称为点积或标量积。它是两个向量之间的一种运算,将两个向量相乘并得到一个标量(实数)的结果。内积通常用于衡量向量之间的相似性、角度和投影等性质。
内积的一般定义是:
对于两个实数向量 a 和 b,它们的内积(点积)表示为 a·b,计算方式如下:
a·b = |a| * |b| * cos(θ)
以下是一个简单的例子来说明内积的概念:
假设有两个二维向量 a 和 b,它们分别表示为:
a = [2, 3]
b = [4, 1]
要计算 a 和 b 的内积,首先需要计算它们的长度(模):
|a| = √(2^2 + 3^2) = √(4 + 9) = √13
|b| = √(4^2 + 1^2) = √(16 + 1) = √17
接下来,计算 a 和 b 之间的夹角 θ,可以使用余弦公式:
cos(θ) = (a·b) / (|a| * |b|)
将 a 和 b 的值代入:
cos(θ) = (2 * 4 + 3 * 1) / (√13 * √17) = (8 + 3) / (√13 * √17) = 11 / (√13 * √17)
现在,我们可以计算内积 a·b:
a·b = |a| * |b| * cos(θ) = √13 * √17 * (11 / (√13 * √17)) = 11
所以,向量 a 和 b 的内积是 11。
内积的计算可以帮助我们理解向量之间的相对方向以及它们之间的相似性。在许多应用中,内积是一个重要的数学工具,例如在机器学习中用于计算特征之间的相关性,以及在物理学中用于计算力学和电磁学中的各种问题。
感知机模型的参数包括权重(weight)向量 w ∈ R n w \in \mathbb{R}^n w∈Rn 和偏置(bias) b ∈ R b \in \mathbb{R} b∈R,这两个参数的维度之所以不同,是因为它们的作用和数学表达的需要不同。
- 权重向量 w ∈ R n w \in \mathbb{R}^n w∈Rn:
- 权重向量 w w w 的维度为 n n n,其中 n n n 表示输入特征的数量。每个特征都有一个对应的权重,用于衡量该特征对模型的重要性。权重向量中的每个元素 w i w_i wi 对应于一个特征,表示该特征在模型中的权重。每个特征都有一个权重,因此需要 n n n 个权重值。
- 偏置 b ∈ R b \in \mathbb{R} b∈R:
- 偏置 b b b 是一个标量(单个实数),它不依赖于特征的数量。偏置的作用是在计算模型的输出时引入一个偏移量,用于调整模型的预测值。它可以理解为模型在没有任何特征输入时的输出值,相当于截距或偏移项。
考虑一个简单的情况,比如二元分类问题,输入特征有 n n n 个,感知机模型的输出是根据权重向量 w w w 对输入特征加权求和后再加上偏置 b b b,然后通过 sign 函数进行分类决策。这就是为什么需要一个长度为 n n n 的权重向量 w w w 和一个标量偏置 b b b 的原因。
总之,权重向量 w w w 的维度与输入特征的数量相关,而偏置 b b b 是一个标量,不依赖于特征的数量,它们一起组成了感知机模型的参数,用于对输入进行线性加权和分类决策。
2.2感知机学习策略
2.2.1数据集的线性可分性
定义2.2(数据集的线性可分性)
2.2.2感知机学习策略
2.3感知机学习算法
2.3.1感知机学习算法的原始形式
∇ w L ( w , b ) = − ∑ x i ∈ M y i x i \nabla_wL(w,b)=-\sum\limits_{x_i \in M}y_i x_i ∇wL(w,b)=−xi∈M∑yixi
∇ b L ( w , b ) = − ∑ x i ∈ M y i \nabla_bL(w,b)=-\sum\limits_{x_i \in M}y_i ∇bL(w,b)=−xi∈M∑yi
这两个公式是关于损失函数 L ( w , b ) L(w, b) L(w,b) 对于模型参数 w w w 和 b b b 的梯度计算。
- ∇ w L ( w , b ) = − ∑ x i ∈ M y i x i \nabla_wL(w,b)=-\sum\limits_{x_i \in M}y_i x_i ∇wL(w,b)=−xi∈M∑yixi 表示损失函数 L ( w , b ) L(w, b) L(w,b) 对于权重参数 w w w 的梯度。具体来说,它告诉我们如何调整权重 w w w 才能最小化损失函数。右侧的求和项计算了关于样本 x i x_i xi 的损失函数的梯度,然后取负号表示梯度下降。这个梯度向量告诉我们,在参数 w w w 的当前值下,每个样本 x i x_i xi 对于损失函数的贡献如何,以及如何将权重 w w w 调整以降低损失。
- ∇ b L ( w , b ) = − ∑ x i ∈ M y i \nabla_bL(w,b)=-\sum\limits_{x_i \in M}y_i ∇bL(w,b)=−xi∈M∑yi 表示损失函数 L ( w , b ) L(w, b) L(w,b) 对于偏置参数 b b b 的梯度。类似地,它告诉我们如何调整偏置 b b b 才能最小化损失函数。右侧的求和项计算了所有样本 x i x_i xi 的标签 y i y_i yi 的总和,然后取负号表示梯度下降。这个梯度值告诉我们,在参数 b b b 的当前值下,所有样本的标签对于损失函数的贡献如何,以及如何将偏置 b b b 调整以降低损失。
这两个梯度计算是优化算法(如梯度下降)中的关键步骤,用于更新模型的参数 w w w 和 b b b 以最小化损失函数。通过迭代地计算这些梯度并更新参数,我们可以让模型逐渐收敛到一个使损失最小化的参数组合,从而提高模型的性能。
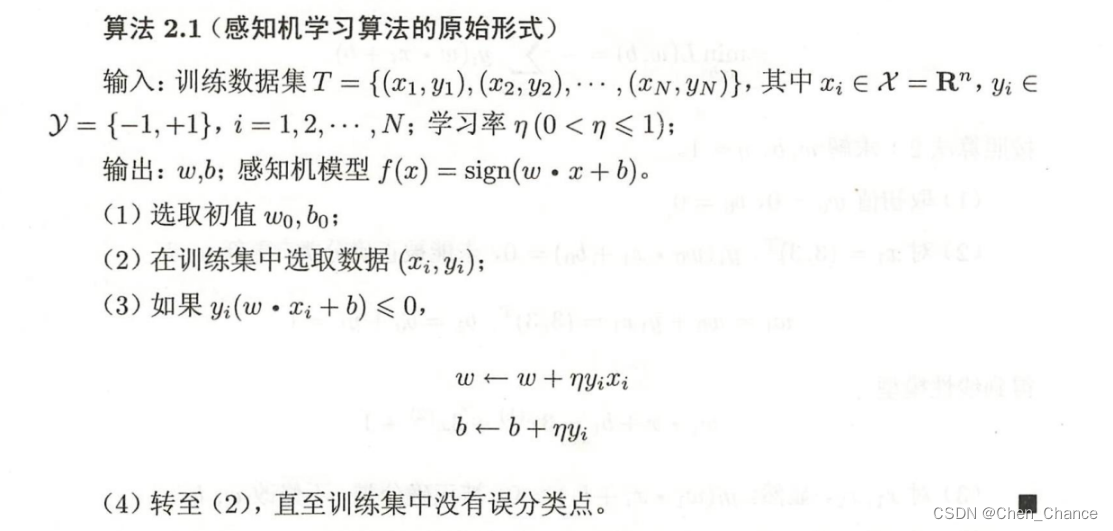
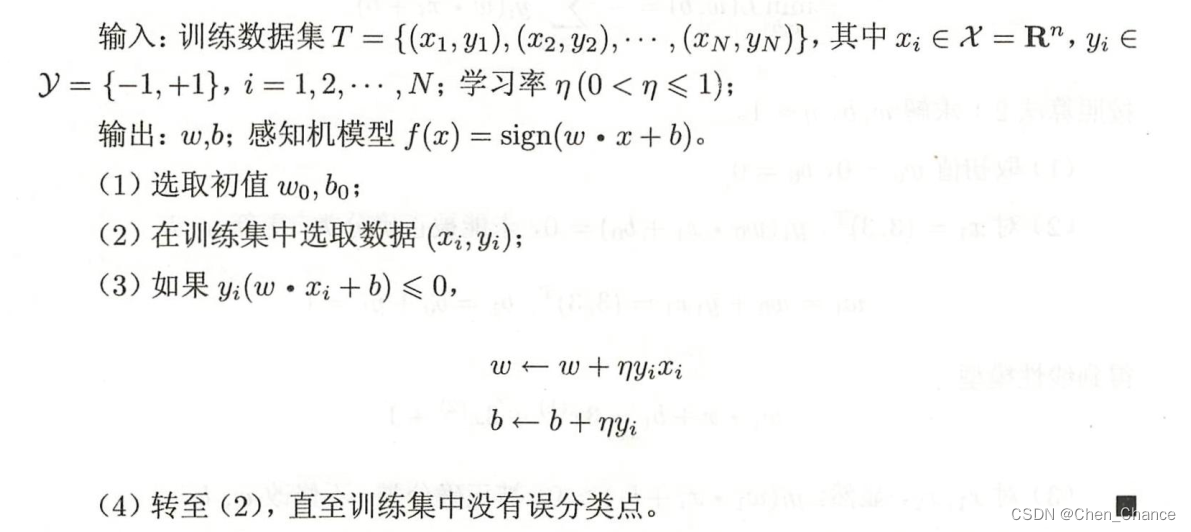
算法2.1(感知机学习算法的原始形式)
2.3.2算法的收敛性
我们现在证明了,对于线性可分数据集感知机学习算法原始形式收敛(即经过有限次迭代可以得到一个将训练数据集完全正确划分的分离超平面及感知机模型)

定理2.1(Novikoff)设训练数据集 T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) } T=\{(x_1,y_1),(x_2,y_2),...,(x_N,y_N)\} T={(x1,y1),(x2,y2),...,(xN,yN)}是线性可分的,其中 x i ∈ X = R n , y i ∈ Y = { − 1 , + 1 } , I = 1 , 2 , . . . , N x_i \in X=R^n,y_i \in Y=\{-1,+1\},I=1,2,...,N xi∈X=Rn,yi∈Y={−1,+1},I=1,2,...,N,则
(1)存在满足条件 ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat w _{opt}||=1 ∣∣w^opt∣∣=1的超平面 w ^ o p t ⋅ x ^ = w o p t ⋅ x + b o p t = 0 \hat w _{opt}\cdot \hat x=w_{opt}\cdot x+b_{opt}=0 w^opt⋅x^=wopt⋅x+bopt=0将训练数据集完全正确分开;且存在 γ > 0 \gamma>0 γ>0,对所有 i = 1 , 2 , . . . , N i=1,2,...,N i=1,2,...,N
y i ( w ^ o p t ⋅ x ^ ) = y i ( w o p t ⋅ x + b o p t ) ≥ γ y_i(\hat w _{opt}\cdot \hat x)=y_i( w _{opt}\cdot x+b_{opt})≥\gamma yi(w^opt⋅x^)=yi(wopt⋅x+bopt)≥γ
(2)令 R = max 1 ≤ i ≤ N ∣ ∣ x ^ i ∣ ∣ R=\max \limits_{1≤i≤N}||\hat x_i|| R=1≤i≤Nmax∣∣x^i∣∣,则感知机算法2.1在训练数据集上的误分类次数k满足不等式
k ≤ ( R γ ) 2 k≤(\frac{R}{\gamma})^2 k≤(γR)2
这是关于 Novikoff 收敛定理的详细数学描述和解释:
定理背景:
- 给定一个训练数据集 T T T,其中包含 N N N 个样本,每个样本的特征是 x i ∈ R n x_i \in \mathbb{R}^n xi∈Rn,标签是 y i ∈ { − 1 , + 1 } y_i \in \{-1, +1\} yi∈{−1,+1}。这个数据集被假定为线性可分,意味着存在一个超平面 w ^ o p t ⋅ x ^ = 0 \hat w_{opt} \cdot \hat x = 0 w^opt⋅x^=0 可以完全正确地将所有样本分开,其中 w ^ o p t \hat w_{opt} w^opt 是法向量,满足 ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat w_{opt}|| = 1 ∣∣w^opt∣∣=1, w o p t w_{opt} wopt 是权重向量, b o p t b_{opt} bopt 是偏置项。
- 定理要证明的是,对于这个线性可分的数据集,感知机算法在训练数据集上的误分类次数 k k k 受到一定的上界限制。
定理内容解释:
- (1)部分:该部分说明了存在一个超平面 w ^ o p t ⋅ x ^ = 0 \hat w_{opt} \cdot \hat x = 0 w^opt⋅x^=0 可以完全正确地分开训练数据集,并且存在一个正数 γ > 0 \gamma > 0 γ>0,使得对于所有训练样本 ( x i , y i ) (x_i, y_i) (xi,yi),都有 y i ( w ^ o p t ⋅ x ^ ) ≥ γ y_i(\hat w_{opt} \cdot \hat x) \geq \gamma yi(w^opt⋅x^)≥γ。这意味着超平面 w ^ o p t ⋅ x ^ = 0 \hat w_{opt} \cdot \hat x = 0 w^opt⋅x^=0 在每个样本点上的分类间隔都至少为 γ \gamma γ。
- (2)部分:该部分说明了感知机算法在训练数据集上的误分类次数 k k k 有一个上界。具体来说,误分类次数 k k k 满足不等式 k ≤ ( R γ ) 2 k \leq \left(\frac{R}{\gamma}\right)^2 k≤(γR)2,其中 R R R 是训练数据集中样本特征的最大范数(绝对值的最大值), γ \gamma γ 是前面提到的正数。这个不等式表明,误分类次数 k k k 受到了数据集的特征范数和分类间隔 γ \gamma γ 的限制,误分类次数不能超过这个上界。
解释:
- 定理的第一部分告诉我们,对于线性可分的数据集,存在一个合适的超平面,可以将所有样本正确分类,并且这个超平面在每个样本点上都有足够大的分类间隔 γ \gamma γ。这个分类间隔 γ \gamma γ 可以看作是超平面离每个样本点的距离,越大表示分类得越确信。
- 定理的第二部分告诉我们,感知机算法在训练数据集上的误分类次数是有界的,上界由数据集中的特征范数 R R R 和分类间隔 γ \gamma γ 决定。这意味着无论感知机算法如何迭代更新权重,它最终将停止,不会永远继续分类错误。误分类次数的上限是关于数据集和分类间隔的一个函数,当 R R R 和 γ \gamma γ 较小时,误分类次数上限也较小,表明算法更容易收敛。
这个定理强调了感知机算法在线性可分数据上的性质,为我们提供了关于算法收敛性和分类性能的理论保证。
w ^ o p t \hat w_{opt} w^opt 和 w o p t w_{opt} wopt 是两个不同的符号,它们用于表示定理中的两个不同的向量:
- w ^ o p t \hat w_{opt} w^opt:这个符号表示的是一个单位向量,通常用来表示一个超平面的法向量。在定理中, w ^ o p t \hat w_{opt} w^opt 表示一个单位法向量,它是一个指向超平面的方向,并用于将数据集分开。单位向量的长度(范数)等于 1。
- w o p t w_{opt} wopt:这个符号表示的是一个权重向量,通常用于线性分类器或超平面模型。在定理中, w o p t w_{opt} wopt 是一个用于定义超平面的向量,它包括了每个特征的权重。与 w ^ o p t \hat w_{opt} w^opt 不同, w o p t w_{opt} wopt 不一定是单位向量,它的长度可以不为 1。
总之, w ^ o p t \hat w_{opt} w^opt 和 w o p t w_{opt} wopt 在定理中表示了两个不同的向量,前者通常是一个单位法向量,后者是一个权重向量,它们在超平面模型中具有不同的作用和含义。
x ^ \hat x x^ 和 x x x 通常表示不同的概念:
- x x x:这是一个通常表示数据点或样本的符号,它包含样本的特征值。在机器学习和统计中,通常将一个数据点或样本表示为一个特征向量 x x x,其中包含了该样本的各个特征的数值。例如,如果我们在分类问题中考虑一个图像, x x x 可以表示该图像的各个像素值或特征提取后的特征值。 x x x 是数据集中的每个样本的不同实例。
- x ^ \hat x x^:这个符号通常用于表示一个单位向量或规范化向量。在一些数学和机器学习上下文中, x ^ \hat x x^ 可以表示将向量 x x x 标准化为单位长度的向量,也就是将其长度(范数)归一化为1。这种标准化常用于定义方向或表示规范化特征。例如,如果 x x x 是一个普通的特征向量, x ^ \hat x x^ 可以表示与 x x x 具有相同方向但长度为1的向量。
总的来说, x x x 通常表示原始数据或特征向量,而 x ^ \hat x x^ 表示具有单位长度的向量或规范化向量。根据上下文,它们可以具有不同的含义和用途。
∣ ∣ x ^ i ∣ ∣ ||\hat x_i|| ∣∣x^i∣∣ 表示向量 x ^ i \hat x_i x^i 的范数(或长度)。范数是一个数学概念,它用于衡量向量在空间中的大小或长度。
在这个上下文中, x ^ i \hat x_i x^i 通常表示一个向量,例如一个特征向量。 ∣ ∣ x ^ i ∣ ∣ ||\hat x_i|| ∣∣x^i∣∣ 就是该向量的范数,它可以有不同的定义方式,包括:
- L2范数(欧几里德范数): ∣ ∣ x ^ i ∣ ∣ 2 ||\hat x_i||_2 ∣∣x^i∣∣2 表示向量 x ^ i \hat x_i x^i 的L2范数,定义为向量各个元素的平方和的平方根。即 ∣ ∣ x ^ i ∣ ∣ 2 = ∑ j = 1 n ( x ^ i [ j ] ) 2 ||\hat x_i||_2 = \sqrt{\sum_{j=1}^{n} (\hat x_i[j])^2} ∣∣x^i∣∣2=∑j=1n(x^i[j])2,其中 n n n 是向量的维度。L2范数衡量了向量的长度。
- L1范数(曼哈顿范数): ∣ ∣ x ^ i ∣ ∣ 1 ||\hat x_i||_1 ∣∣x^i∣∣1 表示向量 x ^ i \hat x_i x^i 的L1范数,定义为向量各个元素的绝对值之和。即 ∣ ∣ x ^ i ∣ ∣ 1 = ∑ j = 1 n ∣ x ^ i [ j ] ∣ ||\hat x_i||_1 = \sum_{j=1}^{n} |\hat x_i[j]| ∣∣x^i∣∣1=∑j=1n∣x^i[j]∣。L1范数衡量了向量各个元素的绝对值之和。
- 无穷范数: ∣ ∣ x ^ i ∣ ∣ ∞ ||\hat x_i||_{\infty} ∣∣x^i∣∣∞ 表示向量 x ^ i \hat x_i x^i 的无穷范数,定义为向量中绝对值最大的元素。即 ∣ ∣ x ^ i ∣ ∣ ∞ = max j ∣ x ^ i [ j ] ∣ ||\hat x_i||_{\infty} = \max_{j} |\hat x_i[j]| ∣∣x^i∣∣∞=maxj∣x^i[j]∣。
不同的范数衡量了向量的不同性质,例如长度、绝对值之和、最大绝对值等。具体使用哪种范数取决于问题的性质和需求。
2.3.3感知机学习算法的对偶形式