Back to FDISYSTEMS
- Knowledge Base
-
惯性&导航传感器
-
导航系统&运动约束
- 数学基础 & 约定
- 参考坐标系
- 载体 & 传感器坐标系
- 方向/旋转表示
- 非线性卡尔曼滤波器SPKF
- 汽车运动公约
- 船舶运动公约
-
惯性传感器安装
-
惯性传感器运行
-
技术洞察
-
Knowledge Base /数学基础 & 约定 /汽车运动公约 /惯导对齐

#汽车运动公约
汽车应用有时涉及从标准INS输出得出的特定测量。最常见的输出是物体速度、滑移角和曲率。
#惯导对齐
重要的是要了解汽车特定的输出精度不仅受到 INS 固有性能的影响,而且还受到车辆内机械安装的影响。特别是,INS 必须与车架完美对齐,以确保测量有效且一致。
例如,如果 INS 安装时航向偏差为 1°,则滑移角测量将以 1° 为中心,而不是 0°。
此外,我们认为标称车辆滑移角和曲率测量通常是在非转向轴(通常是后轴)的中心计算的。
然而,可以通过在您想要测量的位置安装 INS 或使用驱逐的监测点来在车辆的其他位置评估这些数量。
当使用汽车运动曲线时,INS 卡尔曼滤波器会估计并细化任何俯仰和偏航偏差,以确保最佳的导航性能。但是,这种估计的未对准仅在内部使用,因此不会影响产品返回的数据。
#滑移角
滑移Slip 角是地面上的路线(车辆移动的方向)和航向(车辆纵轴指向的方向)之间的角度。
以下公式用于计算以弧度为单位的滑移角:
由于地面路线仅在车辆行驶时定义,因此此输出仅在速度超过 1 m/s 的情况下有效。此外,如果您看到恒定的滑移角值,则表示 INS 未与车架正确对齐(主要是航向角)。
vehicle behavior vs Motion profiles
In case the vehicle is expected to experience regular slips/drifts, we recommend the use of motion profiles that do not use automotive constraints assumptions like the Airplane motion profile for example.
车辆行为与运动约束
如果预计车辆会经历定期打滑/漂移,我们建议不使用汽车约束假设的运动曲线,例如飞机运动曲线。
滑动角度测量位置
滑移角测量使用2D速度信息,因此每个车辆位置都不同。最常见的滑动角测量是在车辆旋转中心进行的。
#精度
滑移角输出的精度将直接受到几个参数的影响:
- INS 真实航向精度
- INS速度精度
- 车速
通常在50 Km/h的典型速度测量侧滑角精度
下表显示了 RTK 模式下 Epsilon-D 在不同速度下的预期精度示例(典型航向精度为 0.1°,速度为 0.05 m/s):
| 速度 (km/h) | Track 精度 (°) | Slip 精度 (°) |
|---|---|---|
| 10 | 0.29 | 0.30 |
| 20 | 0.14 | 0.17 |
| 50 | 0.06 | 0.11 |
| 100 | 0.03 | 0.10 |
| 200 | 0.01 | 0.10 |
#曲率半径
曲率半径会立即反映车辆转弯的车程度。在恒定速度和恒定角速度的情况下,例如在环形交叉路口中,曲率半径将很容易与环形交叉路口半径进行比较。
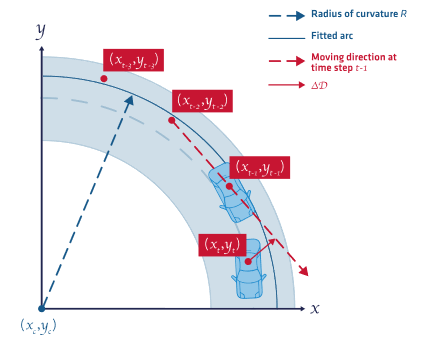
曲率半径沿轨迹拟合
以下公式用于计算曲率半径(以米为单位):
由于直线驱动情况下曲率是无限的,因此该值仅计算并适用于角速率高于 1 °/s 和速度高于 1 m/s 的情况。
曲率测量位置
曲率测量使用 2D 速度信息,因此每个车辆位置都不同。最常见的曲率测量是在车辆旋转中心进行的。
← 非线性卡尔曼滤波器SPKF船舶运动公约 →
惯导对齐滑移角
精度
曲率半径

FDISYSTEMS 支持中心
Copyright © 2023 安徽飞迪航空科技有限公司 版权所有 皖ICP备2022013005号-1