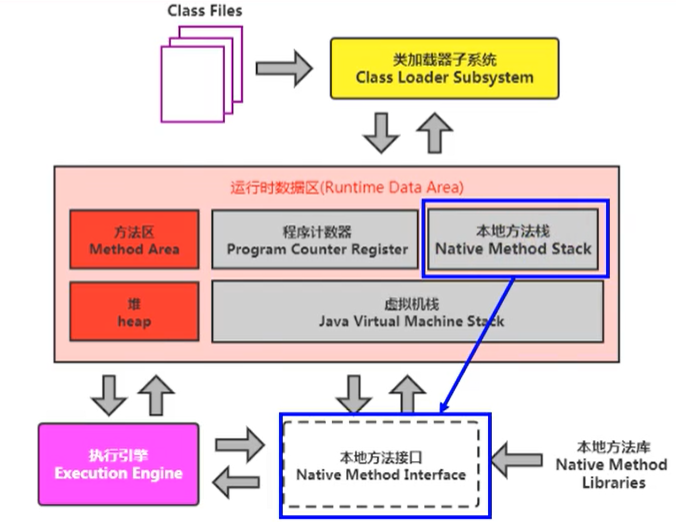
TRANSACTIONS ON ROBOTICS综述论文:抓取合成领域的深度学习方法抓取是机器人在现实世界中操纵物体的基本技能之一,涉及在一组接触点上施加力和扭矩来控制物体的运动,而近些年深度学习方法的突破性研究使机器人在抓取方面取得了快速进展。近期就职于澳大利亚克莱顿市莫纳什大学的Rhys Newbury在TRANSACTIONS ON ROBOTICS期刊杂志上发表的 ”Deep Learning Approaches to Grasp Synthesis: A Review” 综述论文总结了近十年六自由度抓取合成的各类方法,其中最为常用的方法:基于采样的方法、直接回归方法、强化学习方法和范例方法。此外,文中还总结了两种围绕抓取的“支持方法”,它们主要使用深度学习来支持抓取过程、形状近似和可见性。

论文地址: https://ieeexplore.ieee.org/abstract/document/10149823随着计算机视觉中数据驱动方法的增加以及深度学习方法(特别是结合大规模数据时)使得机器人能够实现包括端到端的操作学习、双手协调抓取、手内灵巧操作、在杂乱环境中的拾放等操作任务。这篇工作将主要介绍了深度学习在六自由度抓取合成上的常见方法、深度学习在抓取过程中的支持方法以及数据集设计方法。1. 深度学习方法在六自由度抓取中的应用(Deep Learning Methods in Six-DoF Grasping)常见的深度学习方法在六自由度抓取中主要有:基于采样的方法、直接回归方法、强化学习方法和范例方法。通过对比这些方法,提供了对当前深度学习在六自由度抓取合成领域研究进展的全面概述。四种深度学习方法各有自己的优势和局限性,变换相应的应用场景、所需的处理速度、以及可用的数据类型选择不同的抓取策略。
- 深度学习在抓取过程中的支持方法(Supporting Methods Based on Deep Learning)文中所提出的两种围绕抓取的“支持方法”,它们主要使用深度学习来支持抓取过程、形状近似和可见性。这种支持方法强调了深度学习在抓取过程中的辅助作用,不仅仅局限于抓取本身,还包括了对物体形状的理解和可供性的识别,这些都是提高抓取任务成功率的关键因素,通过这些支持方法,机器人能够更好地理解和适应复杂的操纵任务。

- 数据集设计(Dataset Design)文中强调了在机器人抓取研究中设计和使用数据集的重要性,包括选择适当的对象集、生成和使用程序生成的数据集、利用专家演示数据集,以及选择合适的数据表示和网络架构。这些因素对于训练有效的抓取模型和确保研究结果的可比性和可复现性都至关重要。4. 总结(Conclusion)文中对深度学习在六自由度(6-DoF)机器人抓取合成领域的研究现状进行了总结,并提出了未来包括在多样化的环境中研究六自由度抓取、发布算法的可执行代码、采用一致的性能指标等。本文还强调了多模态传感的重要性,建议未来的研究应不限于单一的视觉感知,探索触觉和听觉等其他传感模态,为未来机器人抓取和复杂操作领域做出进一步发展。
参考文献:R. Newbury et al., “Deep Learning Approaches to Grasp Synthesis: A
Review,” in IEEE Transactions on Robotics, vol. 39, no. 5, pp.
3994-4015, Oct. 2023, doi: 10.1109/TRO.2023.3280597.