Title
题目
A gradient-based approach to fast and accurate head motion compensation in cone-beam CT
基于梯度的快速准确头部运动补偿方法在锥束CT中的应用
01
文献速递介绍
锥束计算机断层扫描(CBCT)系统在灵活性方面比螺旋多排探测器计算机断层扫描(MDCT)扫描仪具有决定性优势。MDCT系统是固定的,患者需要从护理点被转移到位于医院不同区域的成像设备处,这对危重患者来说可能是个问题,因为在多达70%的病例中存在不良反应的风险。此外,将患者转移到成像设备处需要时间,并且需要医护人员陪同。因此,专门的便携式CBCT被认为是直接护理点成像的一种替代选择,例如用于头部成像。同样,急性中风症状患者到达医院时需要进行头部成像。在这种情况下,因将患者转移到MDCT扫描仪而导致的任何延误都会对患者的预后产生严重的不利影响。对于急性缺血性中风患者,尽早进行血管内治疗至关重要。症状出现后150分钟,患者在每增加一小时后,无任何功能障碍地恢复中风的概率会下降10%到20%。将患者直接送到血管造影室并进行CBCT扫描,可以在不延迟的情况下立即启动血管内手术,这有望显著加快工作流程并改善患者的预后。
尽管CBCT具有这些优势,但在中风或ICU床旁成像的临床工作流程中集成CBCT系统仍面临挑战。主要原因之一是患者运动,这可能导致重建图像的严重退化。相比于现代MDCT扫描仪每次旋转约0.4秒的扫描时间,平均一次CBCT扫描需要4到30秒,因此非自主运动对CBCT重建的影响更为显著。Cancelliere等人显示,在310名因急性中风症状到达医院并在血管造影室接受非增强CBCT的患者中,51%出现了运动伪影,11%的图像因退化程度严重而无法进行临床解读。因此,为成功将CBCT系统集成到危重病人或中风患者的临床工作流程中,迫切需要一种可靠的方法来防止运动伪影的产生。
Aastract
摘要
Cone-beam computed tomography (CBCT)systems, with their flexibility, present a promising avenuefor direct point-of-care medical imaging, particularly in critical scenarios such as acute stroke assessment. However,the integration of CBCT into clinical workflows faces challenges, primarily linked to long scan duration resulting inpatient motion during scanning and leading to image quality degradation in the reconstructed volumes. This paperintroduces a novel approach to CBCT motion estimationusing a gradient-based optimization algorithm, which leverages generalized derivatives of the backprojection operatorfor cone-beam CT geometries. Building on that, a fullydifferentiable target function is formulated which gradesthe quality of the current motion estimate in reconstructionspace. We drastically accelerate motion estimation yieldinga 19-fold speed-up compared to existing methods. Additionally, we investigate the architecture of networks usedfor quality metric regression and propose predicting voxelwise quality maps, favoring autoencoder-like architecturesover contracting ones. This modification improves gradientflow, leading to more accurate motion estimation. The presented method is evaluated through realistic experimentson head anatomy. It achieves a reduction in reprojectionerror from an initial average of 3 mm to 0.61 mm after motioncompensation and consistently demonstrates superior performance compared to existing approaches. The analyticJacobian for the backprojection operation, which is at thecore of the proposed method, is made publicly available.In summary, this paper contributes to the advancementof CBCT integration into clinical workflows by proposinga robust motion estimation approach that enhances efficiency and accuracy, addressing critical challenges in timesensitive scenarios.
锥束计算机断层扫描(CBCT)系统因其灵活性,成为直接用于现场医疗成像的有力途径,尤其是在急性中风评估等关键场景中。然而,CBCT集成到临床工作流程中面临挑战,主要是由于扫描时间较长,导致扫描过程中患者发生运动,从而导致重建图像质量下降。本文提出了一种用于CBCT运动估计的全新方法,利用基于梯度的优化算法,采用锥束CT几何体中反投影算子的广义导数。在此基础上,构建了一个完全可微的目标函数,用于在重建空间中评估当前运动估计的质量。我们大幅加速了运动估计过程,相较于现有方法实现了19倍的加速。此外,我们研究了用于质量度量回归的网络结构,并提出预测体素级质量图,更偏向于自编码器类的架构而非收缩型架构。这一改进优化了梯度流,显著提高了运动估计的准确性。该方法通过对头部解剖结构的真实实验进行了验证,在运动补偿后将重投影误差从初始的平均3毫米降低到0.61毫米,并在性能上显著优于现有方法。本文所提出方法核心中的反投影操作的解析雅可比矩阵也已公开。总之,本文通过提出一种稳健的运动估计方法,在提高效率和准确性的同时解决了时间紧迫场景中的关键挑战,为CBCT在临床工作流程中的集成提供了支持。
Method
方法
In CBCT reconstruction, the measured line integrals fromdifferent directions are translated into a spatially resolved mapof X-ray attenuation coefficients. This process depends fundamentally on the exact knowledge of the scanning geometrydescribing the 3D relationship between X-ray source, flatpanel detector, and patient. Usually, stillness of the patientduring the scan is assumed. In that case, any reproducible,circular scanning trajectory of the CBCT scanner is uniquelycharacterized by a set of calibrated projection matrices which map a point in the 3D world coordinate system onto apoint in the detector coordinate system of a specific projectionview. Given accurate projection matrices corresponding tothe projection data, there exist a number of analytic andalgebraic algorithms to solve the reconstruction problem .Movement of the patient introduces a mismatch between thecalibrated projection matrices and the projection data. Duringreconstruction, this mismatch leads to artifacts in the finalimage.
在CBCT重建中,不同方向的测量线积分被转换为具有空间分辨率的X射线衰减系数图。这一过程基本上依赖于精确了解扫描几何参数,以描述X射线源、平板探测器和患者之间的3D关系。通常假设患者在扫描期间保持静止。在这种情况下,CBCT扫描仪的任何可重复的圆形扫描轨迹都可以通过一组校准投影矩阵唯一地表征,这些矩阵将3D世界坐标系中的一个点映射到特定投影视图的探测器坐标系中的一个点。对于与投影数据相对应的精确投影矩阵,存在多种解析和代数算法来解决重建问题。
患者的运动会在校准投影矩阵与投影数据之间引入不匹配。在重建过程中,这种不匹配会导致最终图像出现伪影。
Conclusion
结论
In this paper, the differentiable formulation of CT reconstruction is extended to cone-beam geometry parametersmaking it applicable to motion compensation in real-worldclinical scenarios. Together with an improved quality metric,we see the full advantage of the proposed gradient-basedmethod: A substantial reduction of runtime as well as accurateand robust motion compensation performance. Ultimately, thismethod may pave the way toward point-of-care CBCT headimaging by correcting for inevitable motion artifacts in a fastand reliable manner.
本文将CT重建的可微分公式扩展到锥束几何参数,使其适用于真实临床场景中的运动补偿。结合改进的质量度量,我们可以充分发挥所提出的基于梯度方法的优势:显著缩短运行时间,同时实现准确且稳健的运动补偿效果。最终,该方法可能为现场CBCT头部成像铺平道路,通过快速、可靠地校正不可避免的运动伪影。
Results
结果
All motion compensation experiments are performed onthe same 30 patients from the test set for quality metricmodel training. A random motion pattern is sampled for eachpatient with an amplitude of 5 mm for translation and 5 ◦ forrotation which is kept constant across different methods andoptimization algorithms. The motion estimation itself runs ongrids of size 128 × 128 × 128 with a 2 mm spacing for thereconstructed signal, but the image-based results are computedon higher resolved signals with 256 × 256 × 256 voxels ofsize 1 mm for the final motion-compensated reconstruction.For the evaluation we rigidly register all motion-compensatedreconstructions to their respective ground truth reconstructionin 3D. All box plots in this paper show the median andinter-quartile range as well as the minimum and maximumvalues. Outliers are highlighted by cross markers. Values of theinitial metrics before motion compensation are shown by thegray box. Additionally, we apply our method to two clinicalcone-beam CT head scans that are affected by real patientmotion. Since the motion patterns underlying these scans areintroduced by the patients during the scanning procedure, aquantitative analysis is not possible in this case, but qualitativeresults are presented in section IV-D.
所有运动补偿实验均在同一测试集中的30名患者上进行,用于质量度量模型的训练。为每位患者随机生成一个运动模式,平移幅度为5毫米,旋转幅度为5°,该模式在不同方法和优化算法中保持一致。运动估计本身运行在128 × 128 × 128的网格上,重建信号的间距为2毫米,但基于图像的结果计算在更高分辨率的信号上,最终运动补偿重建的体素大小为1毫米,共256 × 256 × 256体素。
在评估中,我们将所有运动补偿重建结果与各自的3D真实重建结果进行刚性配准。本文中的所有箱线图均显示中位数和四分位距,以及最小值和最大值,异常值以叉号标记。运动补偿前的初始度量值由灰色框表示。此外,我们将该方法应用于受实际患者运动影响的两例临床锥束CT头部扫描。由于这些扫描中的运动模式是在扫描过程中由患者引入的,因此无法进行定量分析,但在第IV-D节中展示了定性结果。
Figure
图
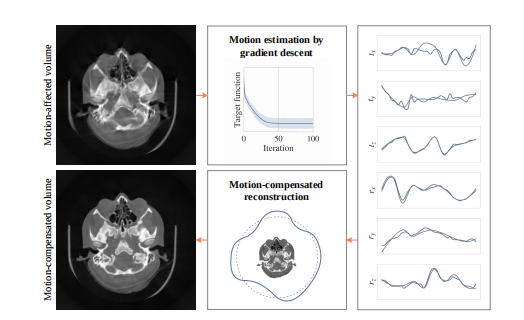
Fig. 1: Rigid motion compensation is performed by firstsolving an optimization problem to estimate the motion patterns from the measured data. Then, a motion-compensatedreconstruction is performed based on the estimated motionpatterns to compute the compensated volume.
图1:刚性运动补偿首先通过求解一个优化问题从测量数据中估计运动模式。然后,基于估计的运动模式执行运动补偿重建,以计算补偿后的体积。
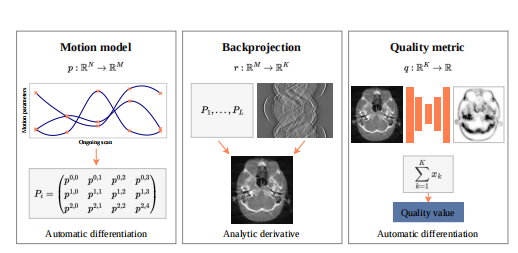
Fig. 2: Overview of the proposed method for rigid motionestimation in CBCT. The three basic building blocks are (1) themotion model, (2) the differentiable backprojection enablingend-to-end gradient flow, and (3) a trained quality metricwhich regresses spatially resolved quality maps.
图2:所提出的CBCT刚性运动估计方法概述。该方法的三个基本构建模块是:(1) 运动模型,(2) 允许端到端梯度流的可微分反投影,(3) 经过训练的质量度量,用于回归空间分辨的质量图。
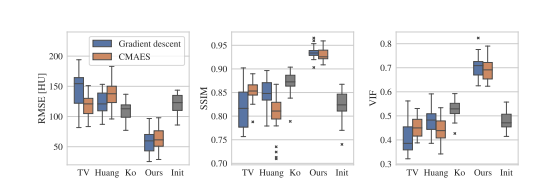
Fig. 3: Comparison of the proposed quality metric with totalvariation (TV) and the network-based quality metric proposedby Huang et al. [6] as well as the image-based one-step methodby Ko et al. [40]. Metrics are root mean squared error (RMSE)(↓), SSIM (↑), and VIF (↑) which are computed on the motioncompensated reconstructed volumes.
图3:将所提出的质量度量与总变差(TV)、Huang等人提出的基于网络的质量度量[6]以及Ko等人的基于图像的单步方法[40]进行比较。所用的度量包括运动补偿重建体积上的均方根误差(RMSE,↓),结构相似性指数(SSIM,↑)和视觉信息保真度(VIF,↑)。
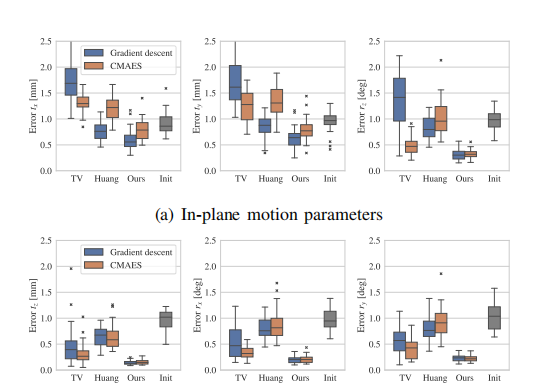
Fig. 4: Comparison of the proposed quality metric with totalvariation (TV) and the network-based quality metric proposedby Huang et al. . The upper (4a) and lower (4b) plots depictthe mean absolute error (MAE) (↓) for the in-plane motionparameters (tx, ty, and rz) and out-of-plane motion parameters(tz, rx, and ry), respectively, referring to the plane in whichthe source rotates.
图4:将所提出的质量度量与总变差(TV)和Huang等人提出的基于网络的质量度量进行比较。上图(4a)和下图(4b)分别显示了平面内运动参数(tx、ty 和 rz)和平面外运动参数(tz、rx 和 ry)的平均绝对误差(MAE,↓),这里的平面是指源旋转的平面。
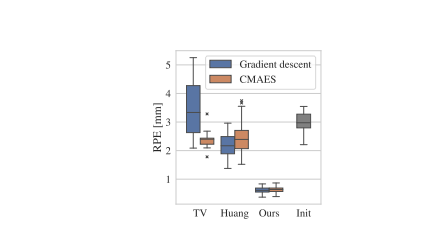
Fig. 5: Comparison of the proposed quality metric with totalvariation (TV) and the network-based quality metric proposedby Huang et al. [6]. The plot shows the reprojection error(RPE) (↓) which quantifies the distance between points afterforward projection onto the detector planes thereby emphasizing on measurable deviations.
图5:将所提出的质量度量与总变差(TV)和Huang等人提出的基于网络的质量度量[6]进行比较。图中显示了重投影误差(RPE,↓),该误差量化了点在向探测器平面前向投影后的距离,从而突出可测量的偏差。
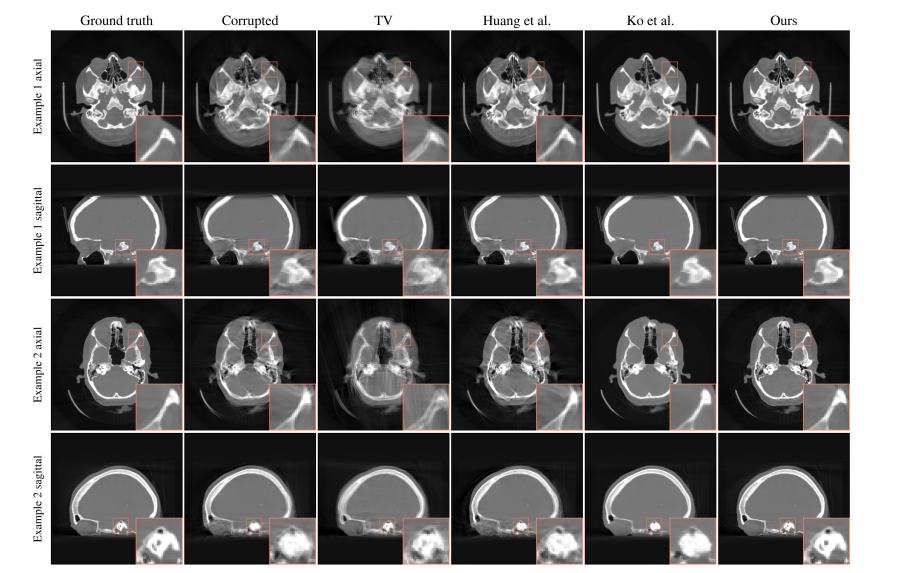
Fig. 6: Qualitative reconstructions for two example patients. For each patient, the upper row shows an axial slice and the lowerrow shows a sagittal slice through the volume. A ×3 zoom of a region of interest is inserted. All gray values are windowedbetween −1200 HU and 1500 HU.
图6:两个示例患者的定性重建结果。对于每位患者,上排显示体积的轴向切片,下排显示矢状切片。插入了感兴趣区域的×3倍放大图。所有灰度值窗口范围为−1200 HU至1500 HU。
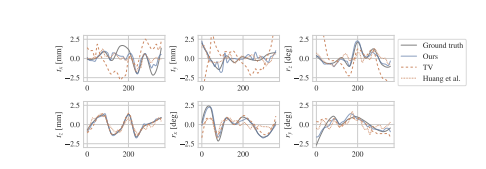
Fig. 7: Motion patterns belonging to example 1 in Fig. 6plotted as a function of acquired projections. The upper andlower row depicts the motion curves for the in-plane motionparameters (tx, ty, and rz) and out-of-plane motion parameters(tz, rx, and ry), respectively, referring to the plane in whichthe source rotates. The perturbing ground-truth motion patternis parameterized by ten spline nodes, whereas all recoveringmotion patterns are parameterized by 30 nodes. The initialmotion-affected reconstruction in Fig. 6 corresponds to motioncurves initialized by zeros.
图7:与图6中的示例1对应的运动模式,绘制为随已采集投影变化的函数。上排显示平面内运动参数(tx,ty 和 rz)的运动曲线,下排显示平面外运动参数(tz,rx 和 ry)的运动曲线,所述平面是指源旋转的平面。扰动的真实运动模式由10个样条节点参数化,而所有恢复的运动模式由30个节点参数化。图6中的初始运动受影响的重建对应于以零初始化的运动曲线。
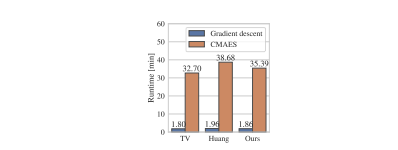
Fig. 8: Comparison of the runtime for the proposed methodand the alternative quality metrics in a gradient-based andgradient-free optimization setting. Each bar depicts the averageruntime across all test samples for motion estimation excludingthe final full-resolution motion-compensated reconstruction.
图8:在基于梯度和无梯度优化设置中,比较了所提出方法与其他质量度量的运行时间。每个柱状图表示所有测试样本中用于运动估计的平均运行时间,不包括最终的全分辨率运动补偿重建。
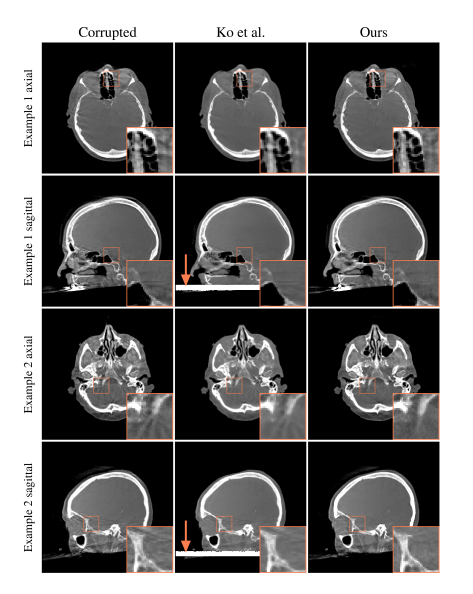
Fig. 9: Qualitative reconstructions for two example patientsusing real motion-affected clinical cone-beam CT scans. Foreach patient, the upper row shows an axial slice and the lowerrow shows a sagittal slice through the volume. A ×3 zoom ofa region of interest is inserted.
图9:两个示例患者的真实运动影响临床锥束CT扫描的定性重建结果。对于每位患者,上排显示体积的轴向切片,下排显示矢状切片。插入了感兴趣区域的×3倍放大图。
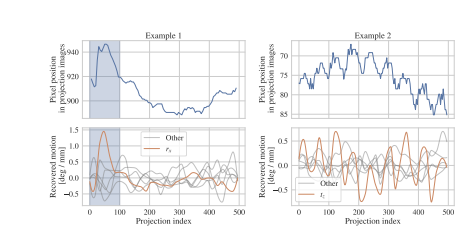
Fig. 10: Comparison of recovered motion patterns for clinical example 1 (left) and example 2 (right) in Fig. 9 withobservable motion in projection images. The upper plotsdescribe the vertical pixel position of an anatomical landmarkin the projection images extracted by manual annotation. Thelower row plots the recovered motion curves (rotations andtranslations). The motion parameter with the highest amplitudeis highlighted in orange (rx for example 1 and tz for example2). Projected motion of the landmark and recovered motioncurve with highest amplitude exhibit a strong similarity
图10:对比图9中临床示例1(左)和示例2(右)中可观察到的投影图像中的运动模式恢复情况。上图显示了通过手动标注提取的解剖标志在投影图像中的垂直像素位置。下排绘制了恢复的运动曲线(旋转和平移)。具有最大幅度的运动参数以橙色突出显示(示例1为rx,示例2为tz)。解剖标志的投影运动与恢复的最大幅度运动曲线表现出高度相似性。
Table
表

TABLE I: Average quantitative values for all investigated metrics and motion compensation methods optimized with gradientdescent. Only image-based metrics can be computed for the method by Ko et al. since it does not explicitly estimate motionpatterns.
表1:使用梯度下降优化的所有研究指标和运动补偿方法的平均定量值。由于Ko等人的方法未明确估计运动模式,因此只能计算基于图像的指标。


![P2672 [NOIP2015 普及组] 推销员](https://i-blog.csdnimg.cn/direct/674e765b83a6447cada21e99b2ce8a6a.png)