往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- 持续更新中……
概述
功能简介
CSI(Camera Serial Interface)是由MIPI联盟下Camera工作组指定的接口标准。CSI-2是MIPI CSI第二版,主要由应用层、协议层、物理层组成,最大支持4通道数据传输、单线传输速度高达1Gb/s。
物理层支持HS(High Speed)和LP(Low Speed)两种工作模式。HS模式下采用低压差分信号,功耗较大,但数据传输速率可以很高(数据速率为80M~1Gbps);LP模式下采用单端信号,数据速率很低(<10Mbps),但是相应的功耗也很低。两种模式的结合保证了MIPI总线在需要传输大量数据(如图像)时可以高速传输,而在不需要传输大数据量时又能够减少功耗。
图1显示了简化的CSI接口。D-PHY采用1对源同步的差分时钟和1~4对差分数据线来进行数据传输。数据传输采用DDR方式,即在时钟的上下边沿都有数据传输。
图 1 CSI发送、接收接口

MIPI CSI标准分为应用层、协议层与物理层,协议层又细分为像素字节转换层、低级协议层、Lane管理层。
- 物理层(PHY Layer)
PHY层指定了传输媒介,在电气层面从串行bit流中捕捉“0”与“1”,同时生成SoT与EoT等信号。
- 协议层(Protocol Layer)
协议层由三个子层组成,每个子层有不同的职责。CSI-2协议能够在host侧处理器上用一个单独的接口处理多条数据流。协议层规定了多条数据流该如何标记和交织起来,以便每条数据流能够被正确地恢复出来。
- 像素字节转换层(Pixel/Byte Packing/Unpacking Layer)
CSI-2规范支持多种不同像素格式的图像应用。在发送方中,本层在发送数据到Low Level Protocol层之前,将来自应用层的像素封包为字节数据。在接收方中,本层在发送数据到应用层之前,将来自Low Level Protocol层的字节数据解包为像素。8位的像素数据在本层中传输时保持不变。
-
低级协议层(Low Level Protocol) LLP主要包含了在SoT和EoT事件之间的bit和byte级别的同步方法,以及和下一层传递数据的方法。LLP最小数据粒度是1个字节。LLP也包含了一个字节内的bit值解析,即Endian(大小端里的Endian的意思)的处理。
-
Lane管理层(Lane Management)
CSI-2的Lane是可扩展的。具体的数据Lane的数量规范并没有给出限制,具体根据应用的带宽需求而定。发送侧分发(distributor功能)来自出口方向数据流的字节到1条或多条Lane上。接收侧则从一条或多条Lane中收集字节并合并(merge功能)到一个数据流上,复原出原始流的字节顺序。对于C-PHY物理层来说,本层专门分发字节对(16 bits)到数据Lane或从数据Lane中收集字节对。基于每Lane的扰码功能是可选特性。
协议层的数据组织形式是包(packet)。接口的发送侧会增加包头(header)和错误校验(error-checking)信息到即将被LLP发送的数据上。接收侧在LLP将包头剥掉,包头会被接收器中对应的逻辑所解析。错误校验信息可以用来做入口数据的完整性检查。
- 应用层(Application Layer)
本层描述了更高层级的应用对于数据中的数据的处理,规范并不涵盖应用层。CSI-2规范只给出了像素值和字节的映射关系。
运作机制
MIPI CSI模块各分层的作用为:接口层提供打开设备、写入数据和关闭设备的接口。核心层主要提供绑定设备、初始化设备以及释放设备的能力。适配层实现其它具体的功能。
说明:
核心层可以调用接口层的函数,核心层通过钩子函数调用适配层函数,从而适配层可以间接的调用接口层函数,但是不可逆转接口层调用适配层函数。
图 2 CSI无服务模式结构图

约束与限制
由于使用无服务模式,MIPI_CSI接口暂不支持用户态使用。
使用指导
场景介绍
MIPI CSI主要用于连接摄像头组件。
接口说明
MIPI CSI模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/mipi_csi_if.h。
表 1 ComboDevAttr结构体介绍
| 名称 | 描述 |
|---|---|
| devno | 设备号 |
| inputMode | 输入模式:MIPI/LVDS/SUBSLVDS/HISPI/DC |
| dataRate | Mipi Rx,SLVS输入速率 |
| imgRect | MIPI Rx设备裁剪区域(与原始传感器输入图像大小相对应) |
| MIPIAttr | Mipi设备属性 |
| lvdsAttr | LVDS/SubLVDS/HiSPi设备属性 |
表 2 ExtDataType结构体介绍
| 名称 | 描述 |
|---|---|
| devno | 设备号 |
| num | Sensor号 |
| extDataBitWidth | 图片的位深 |
| extDataType | 定义YUV和原始数据格式以及位深度 |
表 3 MIPI CSI API接口功能介绍
| 接口名 | 接口描述 |
|---|---|
| DevHandle MipiCsiOpen(uint8_t id) | 获取MIPI_CSI控制器操作句柄 |
| void MipiCsiClose(DevHandle handle) | 释放MIPI_CSI控制器操作句柄 |
| int32_t MipiCsiSetComboDevAttr(DevHandle handle, ComboDevAttr *pAttr) | 设置MIPI,CMOS或者LVDS相机的参数给控制器,参数包括工作模式,图像区域,图像深度,数据速率和物理通道等 |
| int32_t MipiCsiSetExtDataType(DevHandle handle, ExtDataType *dataType) | 设置YUV和RAW数据格式和位深(可选) |
| int32_t MipiCsiSetHsMode(DevHandle handle, LaneDivideMode laneDivideMode) | 设置MIPI RX的Lane分布。根据硬件连接的形式选择具体的mode |
| int32_t MipiCsiSetPhyCmvmode(DevHandle handle, uint8_t devno, PhyCmvMode cmvMode) | 设置共模电压模式 |
| int32_t MipiCsiResetSensor(DevHandle handle, uint8_t snsResetSource) | 复位Sensor |
| int32_t MipiCsiUnresetSensor(DevHandle handle, uint8_t snsResetSource) | 撤销复位Sensor |
| int32_t MipiCsiResetRx(DevHandle handle, uint8_t comboDev) | 复位MIPI RX。不同的s32WorkingViNum有不同的enSnsType |
| int32_t MipiCsiUnresetRx(DevHandle handle, uint8_t comboDev) | 撤销复位MIPI RX |
| int32_t MipiCsiEnableClock(DevHandle handle, uint8_t comboDev) | 使能MIPI的时钟。根据上层函数电泳传递的enSnsType参数决定是用MIPI还是LVDS |
| int32_t MipiCsiDisableClock(DevHandle handle, uint8_t comboDev) | 关闭MIPI设备的时钟 |
| int32_t MipiCsiEnableSensorClock(DevHandle handle, uint8_t snsClkSource) | 使能MIPI上的Sensor时钟 |
| int32_t MipiCsiDisableSensorClock(DevHandle handle, uint8_t snsClkSource) | 关闭Sensor的时钟 |
开发步骤
使用流程
使用MIPI CSI的一般流程如图3所示。
图 3 MIPI CSI使用流程图

获取MIPI CSI控制器操作句柄
在进行MIPI CSI进行通信前,首先要调用MipiCsiOpen获取控制器操作句柄,该函数会返回指定通道ID的控制器操作句柄。
DevHandle MipiCsiOpen(uint8_t id);
表 4 MipiCsiOpen的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| id | uint8_t类型,MIPI CSI通道ID |
| 返回值 | 返回值描述 |
| NULL | 获取失败 |
| 设备句柄 | 获取到指令通道的控制器操作句柄,类型为DevHandle |
假设系统中的MIPI CSI通道为0,获取该通道控制器操作句柄的示例如下:
DevHandle MipiCsiHandle = NULL; // 设备句柄
id = 0; // MIPI CSI通道ID// 获取控制器操作句柄
MipiCsiHandle = MipiCsiOpen(id);
if (MipiCsiHandle == NULL) {HDF_LOGE("MipiCsiOpen: mipi csi open fail.\n");return NULL;
}
进行MIPI CSI相应配置
- 写入MIPI CSI配置
int32_t MipiCsiSetComboDevAttr(DevHandle handle, ComboDevAttr *pAttr);
表 5 MipiCsiSetComboDevAttr的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| pAttr | 结构体指针,MIPI CSI相应配置 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置成功 |
| 负数 | 设置失败 |
int32_t ret;struct ComboDevAttr attr;// 当前配置如下 (void)memset_s(&attr, sizeof(ComboDevAttr), 0, sizeof(ComboDevAttr));attr.devno = 0; // 设备0 attr.inputMode = INPUT_MODE_MIPI; // 输入模式为MIPI attr.dataRate = MIPI_DATA_RATE_X1; // 每时钟输出1像素 attr.imgRect.x = 0; // 0: 图像传感器左上位置 attr.imgRect.y = 0; // 0: 图像传感器右上位置 attr.imgRect.width = 2592; // 2592: 图像传感器宽度大小 attr.imgRect.height = 1944; // 1944: 图像传感器高度尺寸 // 写入配置数据 ret = MipiCsiSetComboDevAttr(MipiCsiHandle, &attr);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiSetComboDevAttr: mipi csi set combo dev attr fail, ret=%d\n", ret);return ret;}
- 设置YUV和RAW数据格式和位深
int32_t MipiCsiSetExtDataType(DevHandle handle, ExtDataType* dataType);
表 6 MipiCsiSetExtDataType的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| dataType | 结构体指针,定义YUV和原始数据格式以及位深度 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置成功 |
| 负数 | 设置失败 |
int32_t ret;struct ExtDataType dataType;// 配置YUV和RAW数据格式和位深参数 dataType.devno = 0; // 设备0 dataType.num = 0; // Sensor 0 dataType.extDataBitWidth[0] = 12; // 位深数组元素0 dataType.extDataBitWidth[1] = 12; // 位深数组元素1 dataType.extDataBitWidth[2] = 12; // 位深数组元素2 dataType.extDataType[0] = 0x39; // 定义YUV和原始数据格式以及位深度元素0 dataType.extDataType[1] = 0x39; // 定义YUV和原始数据格式以及位深度元素1 dataType.extDataType[2] = 0x39; // 定义YUV和原始数据格式以及位深度元素2 // 设置YUV和RAW数据格式和位深 ret = MipiCsiSetExtDataType(MipiCsiHandle, &dataType);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiSetExtDataType: mipi csi set ext data type fail, ret=%d\n", ret);return ret;}
- 设置MIPI RX的Lane分布
int32_t MipiCsiSetHsMode(DevHandle handle, LaneDivideMode laneDivideMode);
<textarea id="copy1723385635370" style="color: inherit; font: inherit; position: absolute; top: -9999px; left: -9999px; z-index: -9999;"></textarea>
表 7 MipiCsiSetHsMode的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| laneDivideMode | 结构体类型,Lane模式参数 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置成功 |
| 负数 | 设置失败 |
int32_t ret;enum LaneDivideMode mode;// Lane模式参数为0 mode = LANE_DIVIDE_MODE_0;// 设置MIPI RX的 Lane分布 ret = MipiCsiSetHsMode(MipiCsiHandle, mode);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiSetHsMode: mipi csi set hs mode fail, ret=%d\n", ret);return ret;}
- 设置共模电压模式
int32_t MipiCsiSetPhyCmvmode(DevHandle handle, uint8_t devno, PhyCmvMode cmvMode);
表 8 MipiCsiSetPhyCmvmode的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| cmvMode | 结构体类型,共模电压模式参数 |
| devno | uint8_t类型,设备编号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置成功 |
| 负数 | 设置失败 |
int32_t ret;enum PhyCmvMode mode;uint8_t devno;// 共模电压模式参数为0 mode = PHY_CMV_GE1200MV;// 设备编号为0 devno = 0;// 设置共模电压模式 ret = MipiCsiSetPhyCmvmode(MipiCsiHandle, devno, mode);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiSetPhyCmvmode: mipi csi set phy cmv mode fail, ret=%d\n", ret);return ret;}
复位/撤销复位Sensor
- 复位Sensor
int32_t MipiCsiResetSensor(DevHandle handle, uint8_t snsResetSource);
表 9 MipiCsiResetSensor的参数和返回值描述
- 表 9 MipiCsiResetSensor的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| snsResetSource | uint8_t类型,传感器的复位信号线号,在软件中称为传感器的复位源 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 复位成功 |
| 负数 | 复位失败 |
int32_t ret;uint8_t snsResetSource;// 传感器复位信号线号为0 snsResetSource = 0;// 复位Sensor ret = MipiCsiResetSensor(MipiCsiHandle, snsResetSource);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiResetSensor: mipi csi reset sensor fail, ret=%d\n", ret);return ret;}
- 撤销复位Sensor
int32_t MipiCsiUnresetSensor(DevHandle handle, uint8_t snsResetSource);
表 10 MipiCsiUnresetSensor的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| snsResetSource | uint8_t类型,传感器的复位信号线号,在软件中称为传感器的复位源 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 撤销复位成功 |
| 负数 | 撤销复位失败 |
int32_t ret;uint8_t snsResetSource;// 传感器撤销复位信号线号为0 snsResetSource = 0;// 撤销复位Sensor ret = MipiCsiUnresetSensor(MipiCsiHandle, snsResetSource);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiUnresetSensor: mipi csi unreset sensor fail, ret=%d\n", ret);return ret;}
复位/撤销复位MIPI RX
- 复位MIPI RX
int32_t MipiCsiResetRx(DevHandle handle, uint8_t comboDev);
表 11 MipiCsiResetRx的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| comboDev | uint8_t类型,MIPI RX或LVDS通路序号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 复位成功 |
| 负数 | 复位失败 |
int32_t ret;uint8_t comboDev;// 通路序号为0 comboDev = 0;// 复位MIPI RX ret = MipiCsiResetRx(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiResetRx: mipi csi reset rx fail, ret=%d\n", ret);return ret;}
- 撤销复位MIPI RX
int32_t MipiCsiUnresetRx(DevHandle handle, uint8_t comboDev);
表 12 MipiCsiUnresetRx的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| comboDev | uint8_t类型,MIPI RX或LVDS通路序号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 撤销复位成功 |
| 负数 | 撤销复位失败 |
int32_t ret;uint8_t comboDev;// 通路序号为0 comboDev = 0;// 撤销复位MIPI RX ret = MipiCsiUnresetRx(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiUnresetRx: mipi csi unreset rx fail, ret=%d\n", ret);return ret;}
使能/关闭MIPI的时钟
- 使能MIPI的时钟
int32_t MipiCsiEnableClock(DevHandle handle, uint8_t comboDev);
表 13 MipiCsiEnableClock的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| comboDev | uint8_t类型,通路序号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 使能成功 |
| 负数 | 使能失败 |
int32_t ret;uint8_t comboDev;// 通路序号为0 comboDev = 0;// 使能MIPI的时钟 ret = MipiCsiEnableClock(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiEnableClock: mipi csi enable clock fail, ret=%d\n", ret);return ret;}
- 关闭MIPI的时钟
int32_t MipiCsiDisableClock(DevHandle handle, uint8_t comboDev);
表 14 MipiCsiDisableClock的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| comboDev | uint8_t类型,通路序号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 关闭成功 |
| 负数 | 关闭失败 |
int32_t ret;uint8_t comboDev;// 通路序号为0 comboDev = 0;// 关闭MIPI的时钟 ret = MipiCsiDisableClock(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiDisableClock: mipi csi disable clock fail, ret=%d\n", ret);return ret;}
使能/关闭MIPI上的Sensor时钟
- 使能MIPI上的Sensor时钟
int32_t MipiCsiEnableSensorClock(DevHandle handle, uint8_t snsClkSource);
表 15 MipiCsiEnableSensorClock的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| snsClkSource | uint8_t类型,传感器的时钟信号线号,在软件中称为传感器的时钟源 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 使能成功 |
| 负数 | 使能失败 |
int32_t ret;uint8_t snsClkSource;// 传感器的时钟信号线号为0 snsClkSource = 0;// 使能MIPI上的Sensor时钟 ret = MipiCsiEnableSensorClock(MipiCsiHandle, snsClkSource);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiEnableSensorClock: mipi csi enable sensor clock fail, ret=%d\n", ret);return ret;}
- 关闭MIPI上的Sensor时钟
int32_t MipiCsiDisableSensorClock(DevHandle handle, uint8_t snsClkSource);
表 16 MipiCsiDisableSensorClock的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,控制器操作句柄 |
| snsClkSource | uint8_t类型,传感器的时钟信号线号,在软件中称为传感器的时钟源 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 关闭成功 |
| 负数 | 关闭失败 |
int32_t ret;uint8_t snsClkSource;// 传感器的时钟信号线号为0 snsClkSource = 0;// 关闭MIPI上的Sensor时钟 ret = MipiCsiDisableSensorClock(MipiCsiHandle, snsClkSource);if (ret != HDF_SUCCESS) {HDF_LOGE("MipiCsiDisableSensorClock: mipi csi disable sensor clock fail, ret=%d\n", ret);return ret;}
释放MIPI CSI控制器操作句柄
MIPI CSI使用完成之后,需要释放控制器操作句柄,释放句柄的函数如下所示:
void MipiCsiClose(DevHandle handle);
该函数会释放掉由MipiCsiOpen申请的资源。
表 17 MipiCsiClose的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,MIPI CSI控制器操作句柄 |
MipiCsiClose(MIPIHandle); // 释放掉MIPI CSI控制器操作句柄
使用实例
本例拟对Hi3516DV300开发板上MIPI CSI设备进行操作。
MIPI CSI完整的使用示例如下所示:
#include "hdf_log.h"
#include "mipi_csi_if.h"
#include "securec.h"enum InterfaceType {INTERFACE_MIPI = 0,INTERFACE_LVDS,INTERFACE_CMOS,INTERFACE_BUTT
};static void InitMipiDevAttr(MipiDevAttr *mipiAttr)
{MipiDevAttr attr;if (mipiAttr == NULL) {return;}HDF_LOGI("InitMipiDevAttr: enter.");(void)memset_s(&attr, sizeof(MipiDevAttr), 0, sizeof(MipiDevAttr));attr.inputDataType = DATA_TYPE_RAW_12BIT;attr.wdrMode = HI_MIPI_WDR_MODE_NONE;// laneId: -1 - disableattr.laneId[0] = 0; // 0 -- laneId 0 attr.laneId[1] = 1; // 1 -- laneId 1 attr.laneId[2] = 2; // 2 -- laneId 2 attr.laneId[3] = 3; // 3 -- laneId 3 // Used by the HI_MIPI_WDR_MODE_DT, This is not fully tested!if (attr.wdrMode == HI_MIPI_WDR_MODE_DT) {attr.dataType[0] = 0x39; // 0x39 -- data type reserved attr.dataType[1] = 0x39; // 0x39 -- data type reserved attr.dataType[2] = 0x39; // 0x39 -- data type reserved attr.dataType[3] = 0x39; // 0x39 -- data type reserved }*mipiAttr = attr;
}static int MipiGetIntputModeType(InputMode inputMode)
{switch (inputMode) {case INPUT_MODE_SUBLVDS:case INPUT_MODE_LVDS:case INPUT_MODE_HISPI:return INTERFACE_LVDS;case INPUT_MODE_MIPI:return INTERFACE_MIPI;case INPUT_MODE_CMOS:case INPUT_MODE_BT1120:case INPUT_MODE_BT656:case INPUT_MODE_BYPASS:return INTERFACE_CMOS;default:break;}return INTERFACE_BUTT;
}static void InitLvdsDevAttr(LvdsDevAttr *lvdsAttr)
{int i;int j;int k;LvdsDevAttr attr;if (lvdsAttr == NULL) {return;}(void)memset_s(&attr, sizeof(LvdsDevAttr), 0, sizeof(LvdsDevAttr));attr.inputDataType = DATA_TYPE_RAW_12BIT;attr.wdrMode = HI_WDR_MODE_NONE;// LVDS synchronization mode. LVDS_SYNC_MODE_SOF, LVDS_SYNC_MODE_SAVattr.syncMode = LVDS_SYNC_MODE_SOF;// LVDS Vsync type. LVDS_VSYNC_NORMAL, LVDS_VSYNC_SHARE, LVDS_VSYNC_HCONNECTattr.vsyncAttr.syncType = LVDS_VSYNC_NORMAL;// hconnect vsync blanking len, valid when the syncType is LVDS_VSYNC_HCONNECT// This is not fully tested!if (attr.vsyncAttr.syncType == LVDS_VSYNC_HCONNECT) {attr.vsyncAttr.hblank1 = 0;attr.vsyncAttr.hblank2 = 0;}// frame identification code: LVDS_FID_NONE, LVDS_FID_IN_SAV, LVDS_FID_IN_DATAattr.fidAttr.fidType = LVDS_FID_NONE;// Sony DOL has the Frame Information Line, in DOL H-Connection mode, should// configure this flag as false to disable output the Frame Information Line.// This is not fully tested!attr.fidAttr.outputFil = 'm';// LVDS bit size end mode: LVDS_ENDIAN_LITTLE, LVDS_ENDIAN_BIGattr.dataEndian = LVDS_ENDIAN_LITTLE;// sync code endian: little/big, LVDS_ENDIAN_LITTLE, LVDS_ENDIAN_BIGattr.syncCodeEndian = LVDS_ENDIAN_LITTLE;// laneId: -1 - disableattr.laneId[0] = 0; // 0 -- laneId 0 attr.laneId[1] = 1; // 1 -- laneId 1 attr.laneId[2] = 2; // 2 -- laneId 2 attr.laneId[3] = 3; // 3 -- laneId 3 /* each vc has 4 params, syncCode[i]:syncMode is SYNC_MODE_SOF: SOF, EOF, SOL, EOLsyncMode is SYNC_MODE_SAV: invalid sav, invalid eav, valid sav, valid eav This is not fully tested! */for (i = 0; i < LVDS_LANE_NUM; i++) {for (j = 0; j < WDR_VC_NUM; j++) {for (k = 0; k < SYNC_CODE_NUM; k++) {attr.syncCode[i][j][k] = 0; // 0 -- frame0 sof }}}*lvdsAttr = attr;
}static int32_t PalMipiCsiTestSample(void)
{uint8_t id;int32_t ret;uint8_t comboDev;uint8_t snsClkSource;uint8_t snsResetSource;uint8_t devno;LaneDivideMode laneMode;PhyCmvMode CmvMode;ComboDevAttr attr;DevHandle MipiCsiHandle = NULL;enum InterfaceType interType;// 控制器ID号 id = 0; // 获取控制器操作句柄 MipiCsiHandle = MipiCsiOpen(id);if (MipiCsiHandle == NULL) {HDF_LOGE("PalMipiCsiTestSample: mipi csi open fail!\n");return HDF_FAILURE;}// Lane模式参数为0 laneMode = LANE_DIVIDE_MODE_0;// 设置MIPI RX的Lane分布 ret = MipiCsiSetHsMode(MipiCsiHandle, laneMode);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi set hs mode fail, ret=%d\n", ret);return ret;}// 通路序号为0 comboDev = 0;// 使能MIPI的时钟 ret = MipiCsiEnableClock(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi enable clock fail, ret=%d\n", ret);return ret;}// 复位MIPI RX ret = MipiCsiResetRx(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi reset rx fail, ret=%d\n", ret);return ret;}// 传感器的时钟信号线号为0 snsClkSource = 0;// 使能MIPI上的Sensor时钟 ret = MipiCsiEnableSensorClock(MipiCsiHandle, snsClkSource);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi enable sensor clock fail, ret=%d\n", ret);return ret;}snsResetSource = 0;// 复位Sensor ret = MipiCsiResetSensor(MipiCsiHandle, snsResetSource);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi reset sensor fail, ret=%d\n", ret);return ret;}// MIPI参数配置如下 (void)memset_s(&attr, sizeof(ComboDevAttr), 0, sizeof(ComboDevAttr));attr.devno = 0; // 设备0 attr.inputMode = INPUT_MODE_MIPI; // 输入模式为MIPI attr.dataRate = MIPI_DATA_RATE_X1; // 每时钟输出1像素 attr.imgRect.x = 0; // 0: 图像传感器左上位置 attr.imgRect.y = 0; // 0: 图像传感器右上位置 attr.imgRect.width = 2592; // 2592: 图像传感器宽度大小 attr.imgRect.height = 1944; // 1944: 图像传感器高度尺寸 interType = MipiGetIntputModeType(attr.inputMode);if (interType == INTERFACE_MIPI) {HDF_LOGI("PalMipiCsiTestSample: call[InitMipiDevAttr].");InitMipiDevAttr(&attr.mipiAttr);} else if (interType == INTERFACE_LVDS) {HDF_LOGI("PalMipiCsiTestSample: call[InitLvdsDevAttr].");InitLvdsDevAttr(&attr.lvdsAttr);} else {HDF_LOGE("PalMipiCsiTestSample: interType = %d is error!", attr.inputMode);}// 写入配置数据 ret = MipiCsiSetComboDevAttr(MipiCsiHandle, &attr);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi set combo devAttr fail, ret=%d\n", ret);return ret;}// 共模电压模式参数为0 CmvMode = PHY_CMV_GE1200MV;// 设备编号为0 devno = 0;// 设置共模电压模式 ret = MipiCsiSetPhyCmvmode(MipiCsiHandle, devno, CmvMode);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi set phy cmv mode fail, ret=%d\n", ret);return ret;}// 通路序号为0 comboDev = 0;// 撤销复位MIPI RX ret = MipiCsiUnresetRx(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi unreset rx fail, ret=%d\n", ret);return ret;}// 关闭MIPI的时钟 ret = MipiCsiDisableClock(MipiCsiHandle, comboDev);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi disable clock fail, ret=%d\n", ret);return ret;}// 传感器撤销复位信号线号为0 snsResetSource = 0;// 撤销复位Sensor ret = MipiCsiUnresetSensor(MipiCsiHandle, snsResetSource);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi unreset sensor fail, ret=%d\n", ret);return ret;}// 关闭MIPI上的Sensor时钟 ret = MipiCsiDisableSensorClock(MipiCsiHandle, snsClkSource);if (ret != HDF_SUCCESS && ret != HDF_ERR_NOT_SUPPORT) {HDF_LOGE("PalMipiCsiTestSample: mipi csi disable sensor clock fail, ret=%d\n", ret);return ret;}HDF_LOGI("PalMipiCsiTestSample: function tests end.");// 释放MIPI DSI设备句柄 MipiCsiClose(MipiCsiHandle);return ret;
}
最后
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

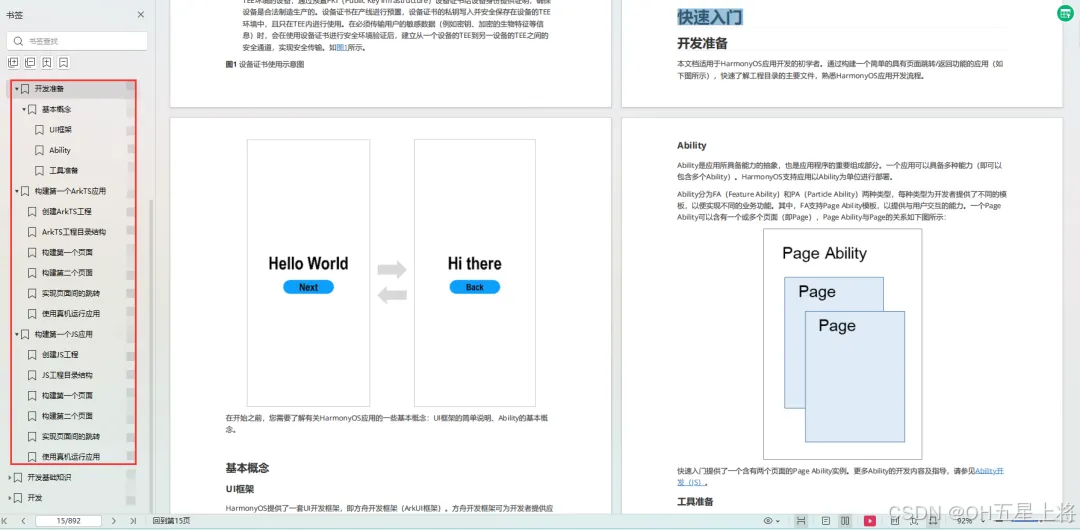
《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
鸿蒙开发面试真题(含参考答案):
《OpenHarmony源码解析》:
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN/733GH/overview