主要内容如下:
1、LEVIR-CD数据集介绍及下载
2、运行环境安装
3、ChangeStar模型训练与预测
4、Onnx运行及可视化
运行环境:Python=3.8,torch1.12.0+cu113,onnxruntime-gpu=1.12.0
likyoo变化检测源码:https://github.com/likyoo/open-cd
使用情况:代码风格属于openmmlab那套,通过修改配置文件config进行模型选择和训练、环境配置简单、训练速度一般。
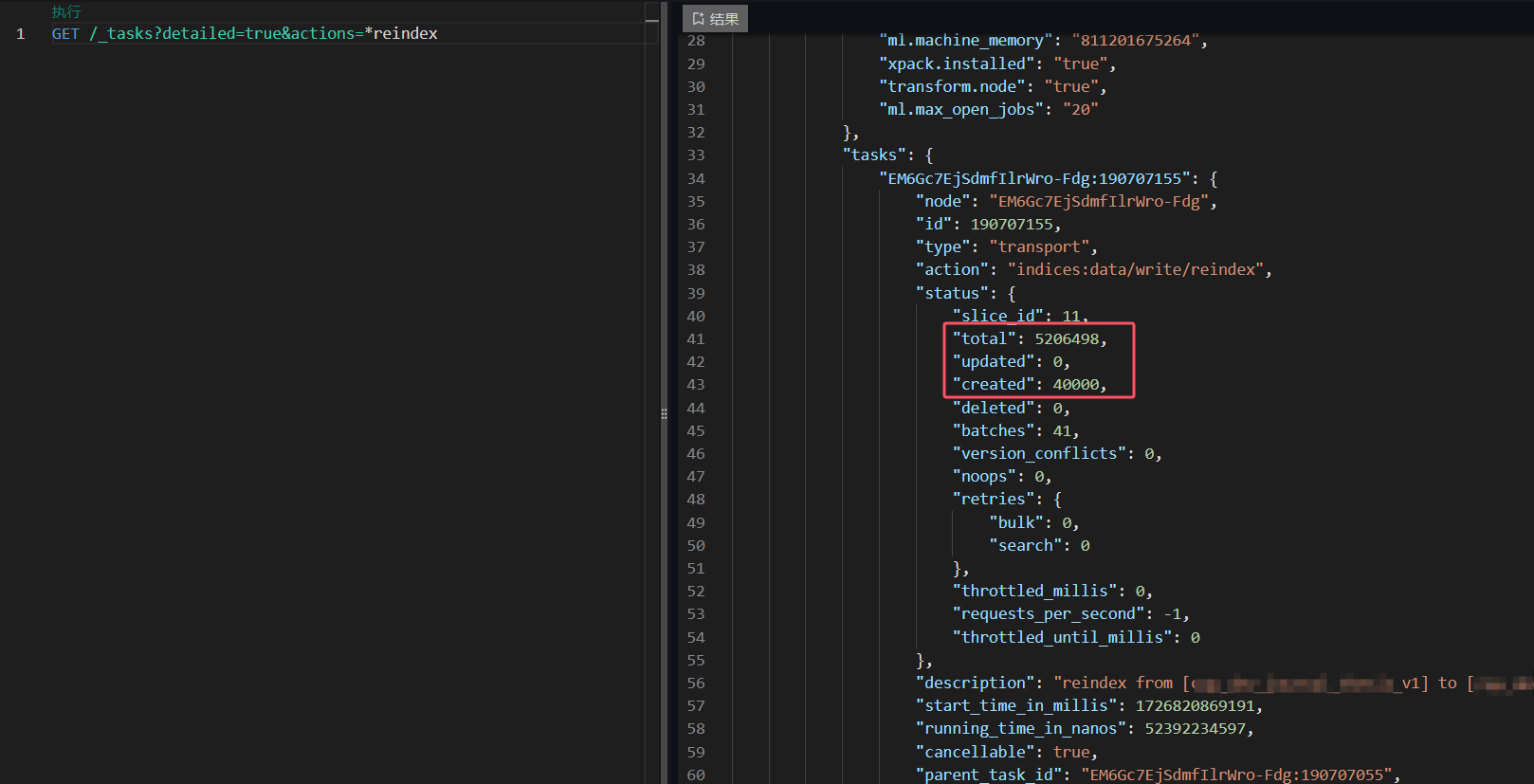
训练资源消耗:默认参数配置,且batch_size为8时,显存占用11G左右,RTX4080迭代40000大概1.5小时。
ONNX推理:显存占用2G左右,RTX4080推理耗时约68ms。
1 LEVIR-CD数据集介绍
1.1 简介
LEVIR-CD 由 637 个超高分辨率(VHR,0.5m/像素)谷歌地球(GE)图像块对组成,大小为 1024 × 1024 像素。这些时间跨度为 5 到 14 年的双时态图像具有显着的土地利用变化,尤其是建筑增长。LEVIR-CD涵盖别墅住宅、高层公寓、小型车库、大型仓库等各类建筑。在这里,我们关注与建筑相关的变化,包括建筑增长(从土壤/草地/硬化地面或在建建筑到新的建筑区域的变化)和建筑衰退。这些双时态图像由遥感图像解释专家使用二进制标签(1 表示变化,0 表示不变)进行注释。我们数据集中的每个样本都由一个注释者进行注释,然后由另一个进行双重检查以生成高质量的注释。
数据来源:https://justchenhao.github.io/LEVIR/
论文地址:https://www.mdpi.com/2072-4292/12/10/1662
快速下载链接:https://aistudio.baidu.com/datasetdetail/104390/1
1.2 示例

2 运行环境安装
2.1 基础环境安装
【超详细】跑通YOLOv8之深度学习环境配置1-Anaconda安装
【超详细】跑通YOLOv8之深度学习环境配置2-CUDA安装
创建Python环境及换源可借鉴如下:
【超详细】跑通YOLOv8之深度学习环境配置3-YOLOv8安装
2.2 likyoo变化检测代码环境安装
2.2.1 代码下载
Git:git clone https://github.com/likyoo/open-cd.git

2.2.2 环境安装
# 1 创建环境
conda create -n likyoo python=3.8
conda activate likyoo# 2 安装torch
# 方式1:
conda install pytorch==1.12.0 torchvision==0.13.0 torchaudio==0.12.0 cudatoolkit=11.3 -c pytorch
# 方式2:
pip install torch==1.12.0+cu113 torchvision==0.13.0+cu113 torchaudio==0.12.0 --extra-index-url https://download.pytorch.org/whl/cu113# 3 验证torch安装是否为gpu版
import torch
print(torch.__version__) # 打印torch版本
print(torch.cuda.is_available()) # True即为成功
print(torch.version.cuda)
print(torch.backends.cudnn.version())# 4 安装其他依赖库
cd ./open-cd-main# 4.1 安装 OpenMMLab 相关工具
pip install -U openmim
mim install mmengine
mim install "mmcv==2.0.0"
mim install "mmpretrain>=1.0.0rc7" # (本地安装版本为1.2.0)
pip install "mmsegmentation==1.2.2"
pip install "mmdet==3.0.0"# 4.2 编译安装open-cd
pip install -v -e .# 5 可能缺少的库
pip install ftfy
3 ChangeStar模型训练与预测
3.1 ChangeStar模型介绍
3.1.1 简介

摘要:对于高空间分辨率(HSR)遥感图像,基于双时相的监督学习在利用大量双时相图像进行变化检测时总是占据主导地位。然而,对于大规模的双时相HSR遥感图像进行双时相标注是昂贵且耗时的。在这篇论文中,我们从利用未配对图像中的对象变化作为监督信号的角度提出了单时相监督学习(STAR)方法,用于变化检测。STAR使我们仅使用未配对标注图像就能训练出高精度的变化检测器,并推广到现实世界的双时相图像。为了评估STAR的有效性,我们设计了一个简单但有效的变化检测器,称为ChangeStar,它可以通过ChangeMixin模块重用任何深度语义分割架构。全面的实验结果表明,在单时相监督下,ChangeStar在与基线的比较中表现出明显的优势,在双时相监督下实现了更优越的性能。代码可在https://github.com/Z-Zheng/ChangeStar上获取。
论文地址:https://arxiv.org/abs/2108.07002
主要贡献包括:
- 提出单时相监督学习(STAR):为了解决高空间分辨率(HSR)遥感图像变化检测中成对标记图像的昂贵和耗时问题,论文提出了一种新的单时相监督学习方法。这种方法利用未成对图像中的对象变化作为监督信号,从而训练出高精度的变化检测器。
- 设计ChangeStar变化检测器:论文设计了一个简单但有效的变化检测器ChangeStar,它可以通过ChangeMixin模块重用任何深度语义分割架构。这使得ChangeStar能够在不进行特定架构设计的情况下,利用现有的优秀语义分割架构来辅助变化检测。
- 探索时序对称性:为了进一步稳定学习过程,论文探索并利用了时序对称性这一归纳偏置,以减轻未成对图像中缺少位置一致性条件导致的过拟合问题。
- 实验验证:通过在两个HSR遥感建筑变化检测数据集上的实验,论文证明了ChangeStar在单时相监督和双时相监督下的性能都优于基线方法。
3.1.2 模型结构

3.1.3 实验结果

3.2 模型训练与预测
3.2.1 修改训练配置文件
(1)选择训练配置

(2)修改configs\common\standard_256x256_40k_levircd.py
关键修改:输入数据集路径data_root一定要对!!!
batch_size和迭代数量等按自己需要调整,预测为1024大小。

3.2.2 模型训练与测试
# 训练,--config配置文件+保存文件夹名
python tools/train.py configs/changestar/changestar_farseg_1x96_256x256_40k_levircd.py --work-dir ./work_dirs/changestar# 测试==》得到评价指标
python tools/test.py configs/changestar/changestar_farseg_1x96_256x256_40k_levircd.py ./work_dirs/changestar/iter_40000.pth

3.2.3 结果显示
# 测试==》得到结果图
python tools/test.py configs/changestar/changestar_farseg_1x96_256x256_40k_levircd.py ./work_dirs/changestar/iter_40000.pth --show-dir tmp_infer

4 Onnx运行及可视化
4.1 Onnx导出静态和动态文件
【特别注意】:该模型有两个输出,因此导出代码需进行适当修改和调整!!!
调整如下(结果见netron结构可视化):

(1)修改tools/export.py脚本,导出onnx,复制如下内容【修改了输入尺寸和增加一个动态onnx导出】:
# Copyright (c) Open-CD. All rights reserved.
import argparse
import loggingimport torch
from mmengine import Config
from mmengine.registry import MODELS, init_default_scopelogging.basicConfig(level=logging.INFO)
logger = logging.getLogger('opencd')def main(args):# must be called before using opencdinit_default_scope('opencd')config_path = args.configcheckpoint_path = args.checkpointinputs = args.inputsmodel_name = args.model_namemodel_name_dy = args.model_name_dyconfig = Config.fromfile(config_path, import_custom_modules=True)model = MODELS.build(config.model)ckpt = torch.load(checkpoint_path)state_dict = ckpt['state_dict']model.load_state_dict(state_dict, strict=True)model.eval()input_shape0 = tuple(map(int, inputs[0].split(',')))input_shape1 = tuple(map(int, inputs[1].split(',')))input0 = torch.rand(input_shape0)input1 = torch.rand(input_shape1)images = torch.concat((input0, input1), dim=1).to(args.device)model.to(args.device)# 导出静态onnxtorch.onnx.export(model,(images),model_name,input_names=['images'],output_names=['output1', 'output2'],verbose=False,opset_version=11,)# 导出动态onnxtorch.onnx.export(model,(images),model_name_dy,input_names=['images'],output_names=['output1', 'output2'],verbose=False,opset_version=11,dynamic_axes={"images": {0 :"batch_size", 2: "input_height", 3: "input_width"},"output1": {0 :"batch_size", 2: "output_height", 3: "output_width"},"output2": {0 :"batch_size", 2: "output_height", 3: "output_width"}})if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--config', '-c', type=str, default='')parser.add_argument('--checkpoint', '-m', type=str, default='')parser.add_argument('--device', type=str, default='cpu')parser.add_argument('--inputs','-i',type=str,nargs='+',default=['1,3,1024,1024', '1,3,1024,1024'])parser.add_argument('--model-name', '-mn', type=str, default='model.onnx')parser.add_argument('--model-name_dy', '-mndy', type=str, default='model_dy.onnx')args = parser.parse_args()logger.info(args)main(args)运行命令如下【结果生成两个onnx文件】:
# 注意报错ValueError: SyncBatchNorm expected input tensor to be on GPU
# 解决措施:device选择GPU进行导出
python tools/export.py --config configs/changestar/changestar_farseg_1x96_256x256_40k_levircd.py --checkpoint ./work_dirs/changestar/iter_40000.pth --device cuda:0
(2)查看模型结构
https://netron.app/
静态onnx:

动态onnx:

注意:其中的[1,6,1024,1024]表示两个[1,3,1024,1024]堆叠一起输入,输出有两个,推理模式三种,默认t1t2即输出output1,t2t1即输出output2,mean即取两者均值。
4.2 Onnx运行及可视化
4.2.1 Onnx推理运行
注意:由于LEVIR-CD图像为1024*1024大小,输入改成1024输入。
import os
import cv2
import time
import argparse
import numpy as np
import onnxruntime as ort # 使用onnxruntime推理用上,pip install onnxruntime-gpu -i https://pypi.tuna.tsinghua.edu.cn/simpleclass CD(object):def __init__(self, onnx_model, in_shape=1024):self.in_shape = in_shape # 图像输入尺度self.mean = [0.485, 0.456, 0.406] # 定义均值和标准差(确保它们与图像数据的范围相匹配) self.std = [0.229, 0.224, 0.225] # 基于0-1范围的# 构建onnxruntime推理引擎self.ort_session = ort.InferenceSession(onnx_model,providers=['CUDAExecutionProvider', 'CPUExecutionProvider']if ort.get_device() == 'GPU' else ['CPUExecutionProvider'])# 归一化 def normalize(self, image, mean, std): # 如果均值和标准差是基于0-255范围的图像计算的,那么需要先将图像转换为0-1范围 image = image / 255.0 image = image.astype(np.float32) image_normalized = np.zeros_like(image) for i in range(3): # 对于 RGB 的每个通道 image_normalized[:, :, i] = (image[:, :, i] - mean[i]) / std[i] return image_normalizeddef preprocess(self, img_a, img_b):# resize为1024大小if img_a.shape[0] != self.in_shape and img_a.shape[1] != self.in_shape:img_a = cv2.resize(img_a, (self.in_shape, self.in_shape), interpolation=cv2.INTER_LINEAR)if img_b.shape[0] != self.in_shape and img_b.shape[1] != self.in_shape:img_b = cv2.resize(img_b, (self.in_shape, self.in_shape), interpolation=cv2.INTER_LINEAR)# 应用归一化 img_a = self.normalize(img_a, self.mean, self.std)img_b = self.normalize(img_b, self.mean, self.std)img_a = np.ascontiguousarray(np.einsum('HWC->CHW', img_a)[::-1], dtype=np.single) # (1024, 1024, 3)-->(3, 1024, 1024), BGR-->RGBimg_b = np.ascontiguousarray(np.einsum('HWC->CHW', img_b)[::-1], dtype=np.single) # np.single 和 np.float32 是等价的img_a = img_a[None] if len(img_a.shape) == 3 else img_a # (1, 3, 1024, 1024)img_b = img_b[None] if len(img_b.shape) == 3 else img_bconcat_img = np.concatenate((img_a, img_b), axis=1) return concat_img# 推理def infer(self, img_a, img_b):concat_img = self.preprocess(img_a, img_b) # (1024, 1024, 3)+(1024, 1024, 3) --> (1, 6, 1024, 1024)preds = self.ort_session.run(None, {self.ort_session.get_inputs()[0].name: concat_img})[0] # (1, 1, 256, 256) if preds.shape[1] == 1:out_img = (np.clip(preds[0][0], 0, 1) * 255).astype("uint8") out_img = cv2.resize(out_img, (img_a.shape[1], img_a.shape[0]))else:out_img = (np.argmax(preds, axis=1)[0] * 255).astype("uint8")return out_imgif __name__ == '__main__':# Create an argument parser to handle command-line argumentsparser = argparse.ArgumentParser()parser.add_argument('--model', type=str, default='weights/model_dy.onnx', help='Path to ONNX model')parser.add_argument('--source_A', type=str, default=str('E:/datasets/LEVIR-CD/test/A/test_7.png'), help='A期图像')parser.add_argument('--source_B', type=str, default=str('E:/datasets/LEVIR-CD/test/B/test_7.png'), help='B期图像')parser.add_argument('--in_shape', type=int, default=1024, help='输入模型图像尺度')args = parser.parse_args()# 实例化变化检测模型cd= CD(args.model, args.in_shape)# Read image by OpenCVimg_a = cv2.imread(args.source_A)img_b = cv2.imread(args.source_B)# 推理+输出t1 = time.time()out = cd.infer(img_a, img_b)print('推理耗时:{}'.format(time.time() - t1))# 保存结果cv2.imwrite('./result/test_7_res.png', out)4.2.2 结果可视化

4.2.3 进一步处理:
(1)可加入腐蚀膨胀处理,消除一些小白点等区域;
(2)将变化区域绘制在第二期图上,便于观察;