前言
由于工厂、车厂的任务需求场景非常明确,加之自今年年初以来,我司在机器人这个方向的持续大力度投入(包括南京、长沙两地机器人开发团队的先后组建),使得近期我司七月接到了不少来自车厂/工厂的订单,比如柔性上料、物料分拣、RL仿真平台搭建等
也让我们越来越坚定在机器人方向发力具身智能 和工业协作机器人,且细分为如下三大场景
- 初级,类似上条微博,面向高校实验室的具身「教学机器人」,及给青年少年小孩的「教育机器人」
- 中级,面向小工厂或家务,硬件成本十来万到几十万,今24年q4 开搞
- 高级,南京那边目前早已在弄的 面向大规模工业场景的协作机器人
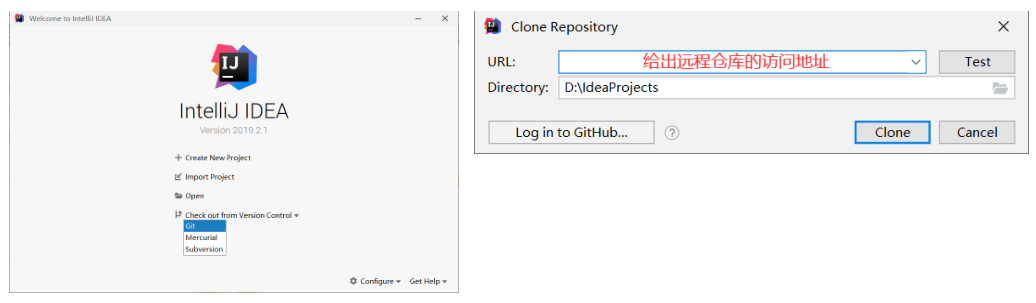
而既然在机器人这个行业,故我们对该领域的各种前沿进展始终保持极高关注,从而注意到了李飞飞团队提出的这个ReKep,其对应的论文为《》,当然,你在阅读该文时,也欢迎使用我司七月开发的基于大模型的翻译系统(目前已上线七月官网,左边英文 右边中文,如此中英文对照下的阅读效率奇快无比)
如我司机器人技术合伙人姚博士所说,“ReKep的方法基于大模型,增加运动限制,而我们之前做的更多基于端到端的专用数据模型”
第一部分 ReKep的提出背景与其关键架构
1.1 提出背景
机器人操作涉及与环境中物体的复杂交互,这些交互通常可以在空间和时间域中表示为约束
考虑下图中的倒茶任务:机器人必须抓住把手,在运输过程中保持杯子直立,最后对齐壶嘴与目标容器,并以正确的角度倾斜杯子进行倒茶

在这里,这些约束不仅编码了中间的子目标(例如,对齐壶嘴),还编码了过渡行为(例如,在运输过程中保持杯子直立),这些约束共同决定了机器人在环境中行动的空间、时间和其他组合要求
然而,有效地为各种现实任务制定这些约束条件面临着重大挑战,之前有不少相关的工作,而李飞飞团队则提出了关系关键点约束——ReKep,具体来说
- ReKep 将约束表示为 Python 函数,这些函数将一组关键点映射到一个数值成本,其中每个关键点都是场景中特定任务和语义上有意义的三维点
ReKep repre-sents constraints as Python functions that map a set of keypoints to a numerical cost, where eachkeypoint is a task-specific and semantically meaningful 3D point in the scene - 每个函数由关键点上的(可能是非线性的)算术运算组成,并编码了它们之间的期望“关系”,这些关键点可能属于环境中的不同实体,例如机器人手臂、物体部件和其他代理
- 虽然每个关键点仅包含其在世界坐标系中的三维笛卡尔坐标,但如果关键点之间的刚性rigidity得到保证,多个关键点可以共同指定线、面和/或三维旋转
他们在顺序操作问题的背景下研究 ReKep,其中每个任务涉及具有时空依赖关系的多个阶段——例如,上述示例中的“抓取”、“对齐”和“倒入”
虽然约束通常是根据任务手动定义的[4],但ReKep的特定形式具有独特的优势
- 即可以通过预训练的大型视觉模型(LVM)[Dinov2: Learning robust visual features without supervision]和视觉-语言模型(VLM)[比如GPT4]实现自动化「they can be automated by pre-trained large vi-sion models (LVM) [5] and vision-language models (VLM) [6]」
- 从而能够从RGB-D观测和自由形式的语言指令中进行自然环境下的ReKep规范(enabling in-the-wild specificationof ReKep from RGB-D observations and free-form language instructions)
具体来说
- 我们利用LVM在场景中提出细粒度且语义有意义的关键点,并利用VLM将这些约束从覆盖有建议关键点的视觉输入写成Python函数
Specifically, we leverage LVM to propose fine-grained and semantically meaningful keypoints in the scene and VLM to write the constraints as Python functions from visual input overlaid with proposed keypoints.
这个过程可以解释为在VLM支持的输出模式(代码)中使用视觉引用表达来奠定细粒度空间关系,通常这些关系不易用自然语言指定(使用大型视觉模型和视觉-语言模型自动指定关键点和约束)
This processcan be interpreted as grounding fine-grained spatial relations, often those not easily specified with natural language, in an output modality supported by VLM (code) using visual referral expressions. - 通过生成的约束条件,可以使用现成的求解器,通过重新评估基于跟踪关键点的约束来生成机器人动作
With the generated constraints, off-the-shelf solvers can be used to produce robot actions by re-evaluating the constraints based on tracked keypoints. - 受[Sequence-of-constraints mpc: Reactive timing-optimal control of sequential manipulation]的启发,采用分层优化程序——将操作任务表述为具有关系关键点约束的分层优化问题
首先解决一组路径点作为子目标(表示为SE(3)末端执行器姿态)
然后解决退化视界控制问题,以获得实现每个子目标的密集动作序列
Inspired by [7], we employ a hierarchical optimization procedure to first solve a set of waypoints as sub-goals (represented as SE(3) end-effector poses) and then solve the receding-horizon control problem to obtain a dense sequence ofactions to achieve each sub-goal
1.2 ReKep的关键方法与其架构
1.2.1 什么是关系关键点约束
ReKep 的一个实例是一个函数,它将关键点数组(记作 k)映射到一个无界的成本,其中
表示约束已满足
函数 实现为一个无状态的 Python 函数,包含对关键点进行的 NumPy [123] 操作,这些操作可能是非线性和非凸的
本质上,ReKep 的一个实例编码了关键点之间的一种期望的空间关系,这些关键点可能属于机器人手臂、物体部件和其他代理
然而,一个操作任务通常涉及多个空间关系,并且可能具有多个时间上相互依赖的阶段,每个阶段都包含不同的空间关系
为此,我们将任务分解为N个阶段,并使用ReKep为每个阶段指定两种约束
- 一组子目标约束
其中,编码了在阶段
结束时要实现的一个关键点关系,相当于是阶段目标
- 一组路径约束
其中,编码了在阶段
考虑下图中的倒水任务,它包括三个阶段:抓取、对齐和倒水

- 阶段1的子目标约束(sub-goal constraint),将末端执行器拉向茶壶把手
- 然后阶段2的子目标约束指定茶壶嘴需要在杯口上方。此外,阶段2的路径约束(path constraint),确保茶壶保持直立,以避免在运输过程中洒出
- 最后,阶段3的子目标约束指定了理想的倒水角度
1.2.2 通过ReKep将操作任务视为带约束的优化问题
使用ReKep作为表示约束的一般工具,采用[7]中的公式,并展示如何将操作任务表述
为涉及和
的约束优化问题
将末端执行器姿态表示为,为了执行操作任务,旨在通过如下公式化控制问题来获得整体离散时间轨迹
(记为方程1)
- 其中 ,
表示在时间
的末端执行器姿态,
是从阶段
的转换时间,这些也是辅助决策变量,
是时间
是关键点的前向模型,
和
是子目标和路径问题的辅助成本函数(例如,碰撞避免)
- 即,对于每个阶段
,以在给定的一组ReKep约束和辅助成本的前提下,实现子目标
Namely, for each stage i, the optimization shall find an end-effector pose as next sub-goal, along with its timing, and a sequence of poses egi−1:gi that achieves the sub-goal, subject to the given set of ReKep constraints and auxiliary costs.
1.2.3 分解与算法实现
为了解实时解决方程1,可以对整个问题进行分解,只优化立即下一个子目标及其到达子
目标的相应路径(算法1中的伪代码)
- 所有优化问题均使用SciPy [ Scipy 1.0: fundamental algorithms for scientific computing in python]实现和解决,决策变量归一化到 [0, 1]
- 它们最初使用双重退火 [126] 和 SLSQP [127] 作为局部优化器(大约1秒)解决,然后基于先前的解决方案仅使用局部优化器以大约10 Hz1的频率解决
// 待更
1.2.4 关键点提议和ReKep生成
// 待更