RTOS 的核心实现:保存,恢复现场
接下来开始尝试实现 RTOS。当然我们开发的时候其实不用这样做,现在尝试实现只是为了更好地理解原理。
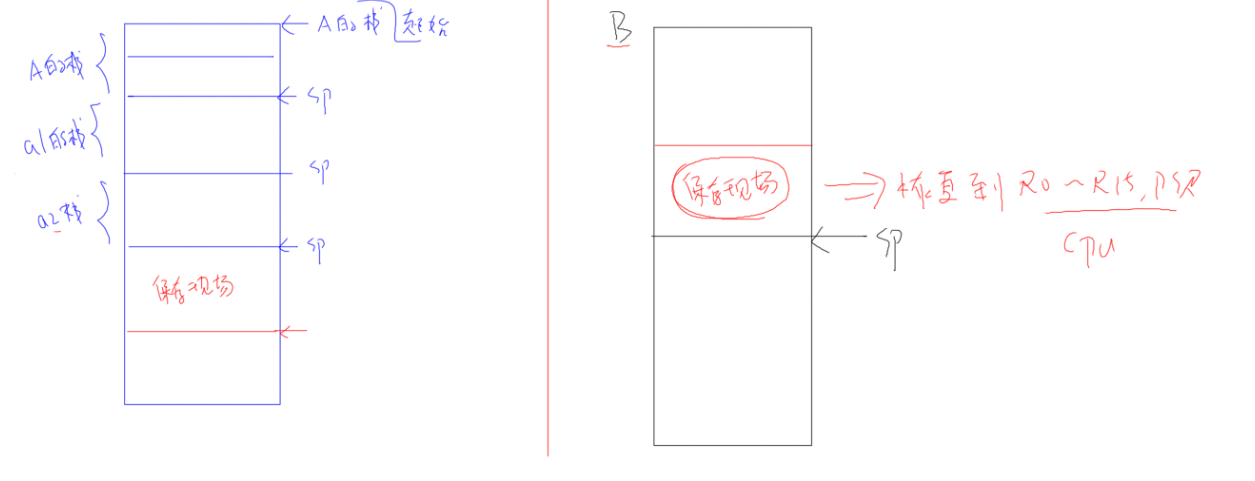
RTOS 的核心就是刚才在研究的问题:保存和恢复现场。再追其本质,其实就是所有寄存器存入栈中了,以此保存。
从上面的代码中可以发现,临时变量都是在每个过程自己的栈中的,而每一个过程都有自己的栈,这个相当于自动保存了。只要不去破坏,就不会收到影响(比如数组越界,可能就会影响到其他函数的栈)。
那么我们首先要实现一个创建任务的函数。创建任务要求如下:
- 任务保存现场,每个任务有自己独立的一套栈;
- 执行任务;
- 恢复现场。
创建任务
我们写一个创建任务函数,传入一个函数指针(这个函数是待执行的任务),传入这个函数执行需要的参数,传入一个栈数组来存取栈。这是一种伪造现场,就是实际上栈的实现是我们自己写程序写了一个数组来存,而不是硬件实现的。
栈我们通过一个 1024 个字节的数组来伪造一个栈,可以存放 256 个寄存器数据(int 也是32位的,所以这里我们用 int 指针来表示栈指针)。
数组自己是从低地址往高地址增长的,栈指针则相反,所以拿到数组基址后要先+1024 跳转到
void create_task(task_function f, void *param, char *stack, int stack_len)
{int *top = stack + stack_len;//sp 指针,位于 stack[1024] 处,stack 是 char 类型数组/* 伪造现场 */top -= 16;//要存16个数据,如下,就是r0-r12,lr,返回地址,xPSR/* r4~r11 */top[0] = 0; /* r4 */top[1] = 0; /* r5 */top[2] = 0; /* r6 */top[3] = 0; /* r7 */top[4] = 0; /* r8 */top[5] = 0; /* r9 */top[6] = 0; /* r10 */top[7] = 0; /* r11 *//* r0~r3 */top[8] = param; /* r0 */top[9] = 0; /* r1 */top[10] = 0; /* r2 */top[11] = 0; /* r3 *//* r12,lr */top[12] = 0; /* r12 */top[13] = 0; /* lr *//* 返回地址 */top[14] = f; /* 任务入口 *//* PSR */top[15] = (1<<24); /* psr 使用thumb指令集 */ /* 记录栈的位置 */task_stacks[task_count++] = (int)top;//栈位置记录在这里,第 task_count 个数组元素的值就是指针指向的地址 int 值
}
psr 的值可以通过查表查看,比如规定是 thumb 还是 arm 的 isa 标志位。
传入参数要注意,栈参数 stack 一定要各不相同,这样才能保证各个任务栈互不干扰,
启动任务
现在每个任务都可以有一个栈了。
启动任务:把这个任务的栈中寄存器值,也就是上次停止运行时的状态恢复。
我们可以在定时器中断中切换任务,这就是时间片轮询的实现。
首先,这个任务想切换,得先创建好吧?没创建切换个锤。于是我们可以用一个变量 is_task_running 规定任务是否创建完成,定时器中断处理里如果发现没启动就先不做切换操作。
然后,如果任务都创建完成了,就在定时器中断处理中修改当前任务的 flag 值来不断切换应该运行的任务。
void SysTick_Handler(int lr_bak, int old_sp)
{int stack;int pre_task;int new_task;SCB_Type * SCB = (SCB_Type *)SCB_BASE_ADDR;/* clear exception status */SCB->ICSR |= SCB_ICSR_PENDSTCLR_Msk;/* 如果还没有创建好任务, 直接返回 */if (!is_task_running()){return; // 表示无需切换}/* 启动第1个任务或者切换任务 */if (cur_task == -1){/* 启动第1个任务 */cur_task = 0;/* 从栈里恢复寄存器 *//* 写汇编 */stack = get_stack(cur_task);StartTask_asm(stack, lr_bak);return ; /* 绝对不会运行到这里 */}else{/* 切换任务 */// 取出下一个任务pre_task = cur_task;new_task = get_next_task();if (pre_task != new_task){ /* 保存 pre_task: 在汇编里已经保存了 *//* 更新sp */set_task_stack(pre_task, old_sp);/* 切换 new_task */stack = get_stack(new_task);cur_task = new_task;StartTask_asm(stack, lr_bak);}}}
具体的恢复栈实现,我们需要操作汇编。我们查询栈数组找到当前应该恢复的栈的 int 值,这个值作为 sp,栈指针。
StartTask_asm PROC; 从任务的栈里把R4~R11读出来写入寄存器; r0 : 保存有任务的栈 ; r1 : 保存有LR(特殊值)LDMIA r0!, { r4 - r11 } ;从 r0 开始读取一系列数据,边读边自增; 更新SPMSR MSP, R0;MOV SP, R0,因为栈操作只能用 msr; 触发硬件中断返回: 它会把栈里其他值读出来写入寄存器(R0,R1,R2,R3,R12,PSR)BX R1ENDPSysTick_Handler_asm PROC; 在这里保存R4~R11STMDB sp!, { r4 - r11 }STMDB sp!, { lr }MOV R0, LR ; LR是一个特殊值ADD R1, SP, #4BL SysTick_Handler ; 这个C函数保证不破坏R4~R11LDMIA sp!, { r0 }LDMIA sp!, { r4 - r11 }BX R0ENDPEND
中断函数的返回地址是跳到一个处理函数,来处理剩余的硬件要处理的寄存器.
发生中断 -> 系统自动跳到 SysTick_Handler_asm (当发生中断自动跳转的时候,此时 lr 是一个特殊值,是硬件恢复现场的地址。中断程序执行完毕返回的时候应当跳转到这里,触发硬件的恢复工作)-> 存储 R4-R11,lr -> 把 lr 和 sp+4 作为参数,开始调用 SysTick_Handler 函数 -> 获取新任务的栈空间 -> 调用 StartTask_asm,获取其数组栈中保存的数据 -> 跳转到 Task a,开始执行 -> 中断恢复。
中断恢复:当跳转到 SysTick_Handler 函数时,此时 lr = 一个特殊值(如 0xFFFFFFF9),当程序跳转到这里的时候就会执行中断的返回,触发硬件的恢复工作。
graph TB
A[发生中断]-->B[硬件压栈,如 PC,LR,SP 等]
B-->C[SysTick_Handler_asm]
C-->D[SysTick_Handler]
D-->E{当前是否有任务执行}
E--是-->F[保存当前任务现场]
F-->G
E--否-->G[获取新任务栈]
G-->H[StartTask_asm]
H-->I[恢复 R4-R11]
I-->J[跳转到硬件中断恢复现场处]
main 创建的两个任务各自的栈是这样定义的:
static char stack_a[1024] __attribute__ ((aligned (4)));;
static char stack_b[1024] __attribute__ ((aligned (4)));;
意为数组元素以4字节为长度对齐。因为字长32,存储寄存器状态也是4字节。
切换任务
保存A现场;取出B栈;切换任务。
在启动任务的基础上加任务切换保存旧任务的代码。
内容见上。
补充内容
- 如果需要加数组的不同状态(锁定等),则可以定义一个状态数组,我们访问数组来判断当前这个任务能不能被切换。
- 同步互斥:为了进行原子操作,可以暂时关闭中断避免多个任务同时操作一个变量造成错误。