一、说明
先决条件 — ROS2 软件包的基本知识、实现发布者、订阅者、操作并连接它们。
我们之前在 ROS2 中了解了不同的部分。但是,在我们转向实际的基于硬件的项目之前,将它们很好地结合起来理解 ROS2 是关键。
这是我们当前系列的议程— 第 1 部分:开始使用新的 ROS2 项目 — 演示带有垃圾拾取机器人自定义包的样板 ROS2 项目 第 2 部分:改进 ROS2 代码库 — 启动文件和 ROS 参数
第 3 部分:通过测试改进项目 — 添加 ROS 测试基础架构 第 4 部分:从业余爱好者到优质项目 —
在 Github 上为 CI/CD 添加 docker
二、垃圾捡拾机器人 —
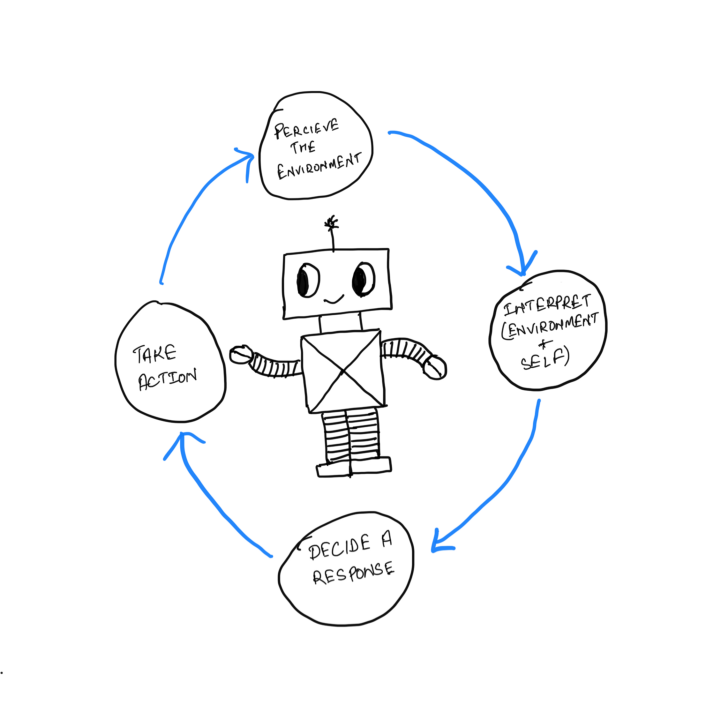
以下是我们想要设计系统的方式 —
- 感知和解释 — 我们使用摄像头图像来查看机器人的附近,对其进行处理,并确定是否存在垃圾。该信息被转发到决策模块(大脑)。
- 决定 — 决策模块(大脑)从感知(和解释)中获取垃圾存在信息,并决定机器人是否应该采取行动。 如果大脑决定采取行动并移动机器人(因为存在垃圾),它会命令驱动模块这样做。
- 行动 —根据大脑的命令,驱动模块移动机器人(例如,使用电机)去收集垃圾。
注意:我们的朴素系统过于简单(只关注 ROS2 设计)。在本系列中,我们不考虑核心机器人算法、控件(开环/闭环)或视觉。这将在后面的课程中完成,我们将基于此处建立的基本 ROS2 思想。
我们将系统分为 3 个逻辑组件——感知、大脑和驱动。

如果我们想象我们的软件设计,我们应该有 3 个 ROS2 包(因此是节点)
- 感知 — 该节点将从机器人的摄像头获取输入图像并从中获取见解(例如垃圾的存在)。
- 脑—— 该节点从感知模块获取见解,处理此信息,并通知致动模块下一步该做什么。
此外,大脑通常只关心每一帧中感知的视觉信息。但偶尔,大脑想知道感知相机的电池状态。 - 驱动 — 该节点将命令伺服电机移动机器人的四肢。想象一下,机器人走向垃圾桶,捡起它,移动到垃圾箱,然后收集它。使用致动代码控制运动
大脑模块实际上就像人脑一样,通过感觉器官(感知)接收信息,并通过电机(驱动)指挥适当的动作。甜!
接下来,本系列的第 1 部分将重点介绍如何使用垃圾收集机器人的自定义包构建一个样板 ROS2 项目。
让我们建造,好吗?
三、ROS2 有何不同 — 总结!
1. 第三方中间件
ROS1 与 ROS2:DDS
ROS1有自己的中间件,它使用网络堆栈将信息从一个节点发送到正确的套接字,中间件再次接收到信息以将信息发送到正确的节点(过度简化)。
ROS2抛弃了中间,现在使用数据分发服务(DDS),这是一个可靠的行业标准的第三方中间件。
2. 没有玫瑰大师
Rosmaster是一项服务,方便两个节点找到彼此(如果它们希望通信)。接下来是它们直接相互连接。如果 rosmaster 在此过程中死亡,这些节点仍将连接,但没有新节点可以加入通信网络。
在 ROS1 中,每个节点都需要知道主节点的位置(即使系统在多台机器上运行)。
ROS2取消了rosmaster,节点可以直接找到彼此。
3. Cpp 和 Python 的共享代码库
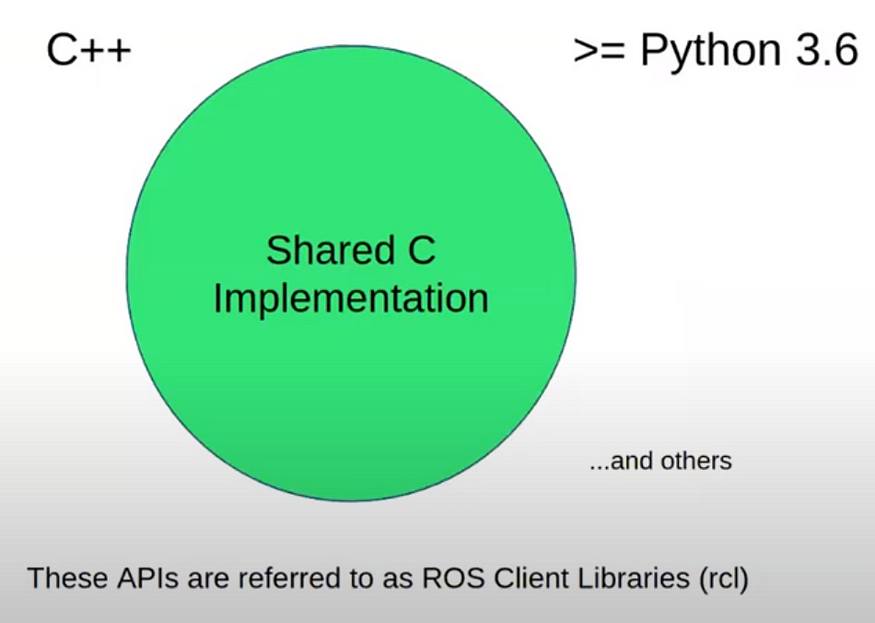
RCL
ROS支持两种语言,Cpp和Python,底层实现在某些地方有所不同。例如,每个订阅者在 Python 中都有自己的线程,但在 Cpp.All
对于 ROS1 来说都是如此,但 ROS2 具有相同的共享 C 实现。这个通用的代码库通过C++和Python中的ROS客户端库API公开。
4. 一个进程中有多个ROS节点 ROS1不允许一个进程中
有多个ROS节点。ROS2 中的变化
5. Python 构建要求
在 ROS1 中更改 Python 文件不需要您构建项目。ROS2 需要你重新构建项目,这太糟糕了!😦
6. 操作服务 操作服务
不是核心 ROS1 库的一部分(而是 actionlib)。ROS2 核心库具有操作服务器
7. 视窗支持
ROS2 是视窗支持的!好吧,我真诚地希望你正在使用Linux 😛。
8. 更改了启动基础结构
ROS1 主要使用基于 XML 的启动文件。ROS2 有一个支持排序约束的 python 启动系统
四、为什么要迁移到 ROS2?
这是一个很难回答的问题。此举有一些惯性,主要是因为 ROS2 社区仍然没有 ROS1 那么大。这导致更少的在线开发支持和更长的开发时间。
但大多数著名的开源 ROS1 软件包已经或将很快达到生命周期的终点。面向未来的项目和技能提升是采取行动的两个原因。
五、ROS2 设置
第 1 阶段:安装 ROS2
在本课中,我们使用 ubuntu Focal(20.04.3 LTS),它支持 ROS2 Galactic。
这里有一个链接可以很好地解释 ROS2 的安装。他们在解释安装:)方面比我做得更好
第 2 阶段:测试 ROS2
为了测试我们的 ROS2 设置,我们执行以下操作:
1. 获取终端
source /opt/ros/$ROS_DISTRO/setup.bash 如前所述,从今以后我将使用银河而不是$ROS_DISTRO
2. 运行演示监听器和说话者节点:
我们将使用“/opt/$ROS_DISTRO/lib/”中已经存在的demo_nodes_cpp包
在源终端中运行以下命令:
ros2 run demo_nodes_cpp listener & ros2 run demo_nodes_cpp talker 您将看到以下内容:
如果是,我们可以确定我们的 ROS2 设置。
呜呜呜!我们已经准备好在 ROS2 中开始开发。让游戏开始 😉
转到本系列的第 2 部分 这里.
在第 1 部分中,我们在 Gazebo 中设置了 TurtleBot3 模拟,这构成了我们在 ROS 2 中所有移动机器人实验的基础。
下一步是什么? 我们现在了解如何使用 Nav2 在 ROS 2 中设置自主导航。在 ROS 1 中,我们使用了导航堆栈,它是多个包的组合,如 move_base、amcl 和地图服务器,仅举几例。
但是 Nav2 是镇上新的酷人,其中大多数软件包已经是其中的一部分,并且功能增强。制造商希望将“ ROS导航带出实验室”,或者简单地说,使其具有生产质量。
六、我们如何在 ROS 2 中设置自主导航?
为了回答这个问题,我们先来看看一些机器人导航概念,好吗?
有一秒钟,把自己放在机器人的鞋子里,你要求自主移动。假设有人说——“哎呀,搬到B位置!
你会怎么做?好吧,我想问以下两个问题——
- 我在哪里?
- 位置 B 在哪里,换句话说,我的周围(地图)是什么样的?
而这正是机器人真正需要的——
- 本地化 — 机器人在哪里?
- 映射 — 地图/世界是什么样的?
从技术上讲,这就是机器人大脑处理这些信息并决定移动所需要的。在这种情况下,我们机器人的大脑是导航包。直观,嗯?
因此,我们定义了导航所需的两条信息。
由于这仍然是一个基本的帖子,让我们避免理论(这很重要,但稍后),并转移到 ROS 2 中的 Nav2 包
正如我们所建立的,Nav2需要机器人的当前位置和地图。
在 ROS/ROS2 中,这转化为两个要求—
- 机器人定位 — 变换和变换
map -> odomodom -> base_link
Nav2 的预期输入是符合 REP-105 的两个 TF 转换。
全球定位系统(GPS,SLAM,运动捕捉)的工作至少可以提供转换。通常,这是 Nav2 的一部分用于此目的。map->odomamcl
测程系统的作用是提供->转换。里程计可以来自许多来源,包括激光雷达、雷达、车轮编码器、VIO 和 IMU。测程法的目标是提供基于机器人运动的平滑和连续的局部框架。全球定位系统将更新相对于全局帧的变换,以考虑测距漂移。odombase_link
机器人定位通常用于这种融合。它将采用各种类型的传感器,并为TF和主题提供连续和平滑的测程。典型的移动机器人设置可能具有以这种方式融合的车轮编码器、IMU 和视觉的测程计。N
然后,平滑输出可用于航位推算以实现精确运动,并在全局位置更新之间准确更新机器人的位置。
- 地图 —在需要 SLAM(同时定位和映射)的应用程序中,这是与导航并行完成的。但目前,我们有兴趣使用静态地图(因此我们已经知道周围的地图)进行导航。在 ROS 2 中,SLAM 工具箱可用于生成静态地图,我们可以保存它以供导航。
如果这一切都有意义,那就太棒了。如果没有,请耐心等待。在下面的 ROS 2 中完成这项工作将澄清:)
从我内心深处,我相信边建边学的策略。那么,好吗?
七、使用 TurtleBot2 模拟设置基于 ROS 3 的导航—
第 1 步 — 在凉亭中设置 ROS 2 和 TurtleBot3 以进行模拟
请查看我们的第 0 部分和第 1 部分以完成此操作(如果您尚未完成)
如果你这样做了,你应该擅长在凉亭中运行TurtleBot3模拟。
第 2 步 — 设置本地化
首先,在凉亭中运行 TurtleBot3
为 ROS 2 提供终端 —
source /opt/ros/galactic/setup.bash 转到我们在第 3 部分中构建的 TurtleBot1 包,然后获取终端 —
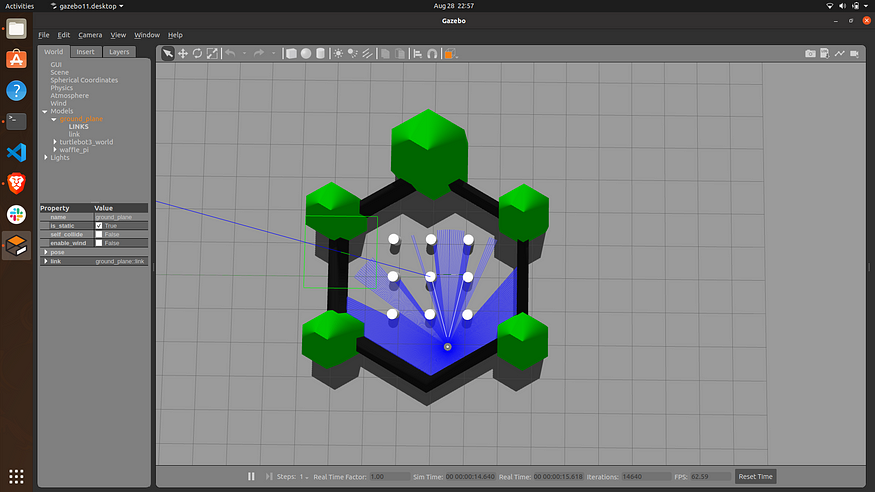
source ./install/setup.bash 运行海龟机器人3世界模拟 —
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py 您应该看到模拟正在运行 —
现在,打开另一个终端,source ROS 2然后查找题目:
ros2 topic list
看看!有一个主题,它给了我们测程值和转换。所以我们已经准备好了本地化,对吧?odomodom->base_link
好吧,虽然我们将使用它,但在一般情况下,不完全是。
当您使用真正的机器人时,这些测程值是嘈杂的并且容易漂移。因此,我们需要使用机器人定位包将它们与其他传感器输出(如 IMU(本地)和 GPS(全球))融合。
在我们的例子中,odom 几乎没有任何噪声(我还没有找到一种方法来增加模型的 odom 噪声而不在代码中重新发布)。因此,我们将使用它。
因此,对我们来说,本地化价值已经准备就绪。
步骤 3 — 设置静态地图
为此,我们使用 ROS 2 中的 SLAM 工具箱
- 安装 SLAM 工具箱
sudo apt install ros-<ros2-distro>-slam-toolbox 我正在使用银河,所以——
sudo apt install ros-galactic-slam-toolbox - 启动用于映射的 slam 工具箱包 —
在一个新的终端中(当然,在采购 ROS 2 之后,一定要这样做)—
source /opt/ros/galactic/setup.bash
ros2 launch slam_toolbox online_async_launch.py - 使用必要的可视化启动 Rviz2
在新终端中,启动 rviz2
source /opt/ros/galactic/setup.bash
rviz2 添加以下内容以进行可视化
- 激光扫描 — 主题 , 可靠性政策
/scanBest Effort - 地图 — 主题
/map - TF
这是我的 Rviz 观点——

- 运行远程操作以移动机器人进行映射 —
在一个新的终端中——
source /opt/ros/galactic/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard - 将 Gazebo 和 RViz 并排放置,然后 teleop 查看在 RViz 中创建的地图 —
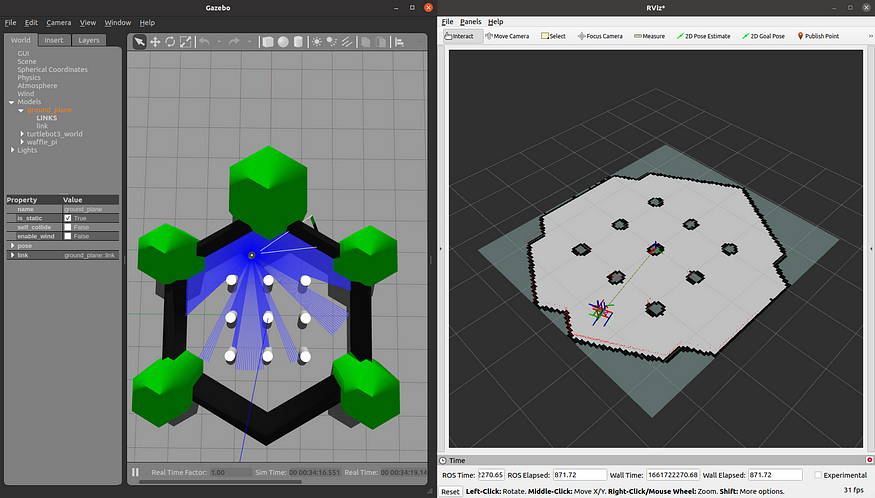
我通常会显着减慢机器人的速度以获得更好的地图
- 保存地图
在新终端中,运行nav2_map_server
source /opt/ros/galactic/setup.bash
ros2 run nav2_map_server map_saver_cli -f ~/map 这会将地图保存在我们的主目录中(map.pgm 和 map.yaml)
那是映射。
而且。我们准备接下来导航!
第 4 步 — 自主导航
请杀死slam_toolbox节点、远程操作节点和 RViz。我们不再需要它们了。此时,只有 TurtleBot3 凉亭模拟应该运行
现在我们已经准备好本地化(主题)和映射(我们保存的地图),我们可以开始导航了/odom
- 启动导航
在一个新的终端中——
source /opt/ros/galactic/setup.bash
ros2 launch nav2_bringup bringup_launch.py use_sim_time:=True autostart:=True map:=/path/to/your-map.yaml 这将设置自主导航所需的所有节点,但会发出有关框架不存在的警告。我们会尽快解决这个问题。map
在另一个终端中,启动 RViz,但具有预设的可视化 —
source /opt/ros/galactic/setup.bashros2 run rviz2 rviz2 -d $(ros2 pkg prefix nav2_bringup)/share/nav2_bringup/rviz/nav2_default_view.rviz 房车视图 —
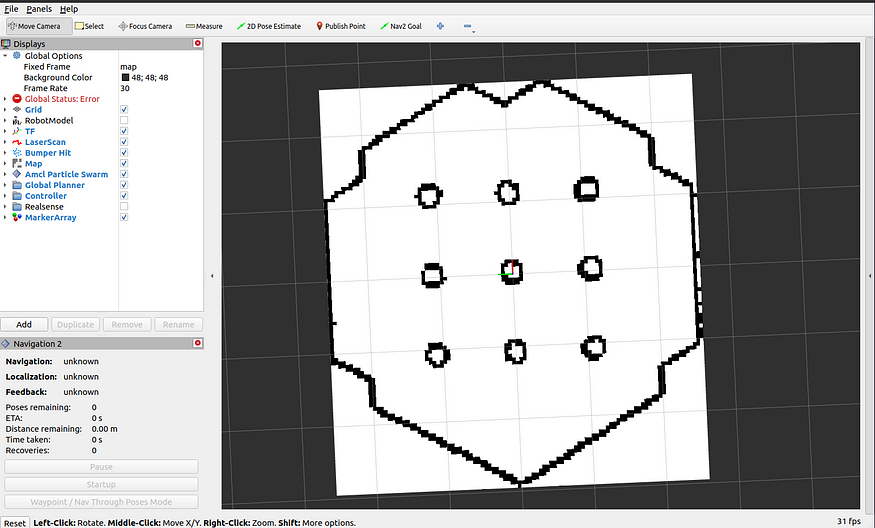
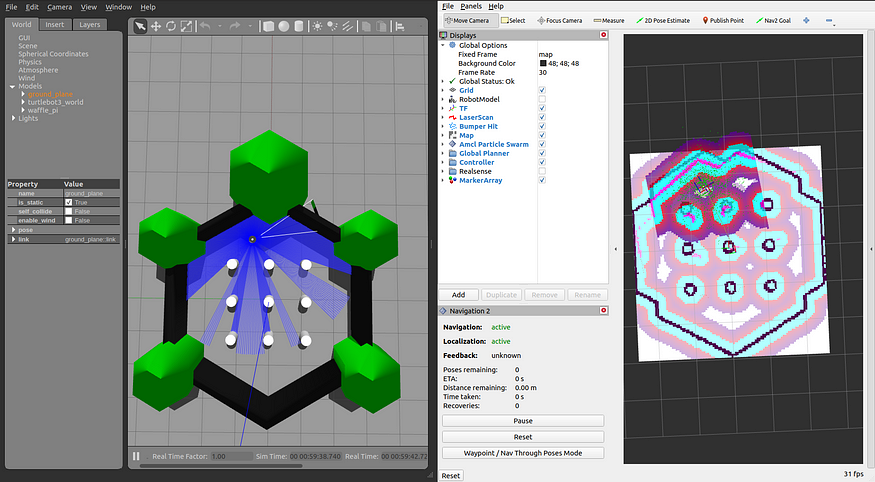
您将看到全局状态错误,这是关于地图不可用。
问题是,转换是由 amcl 发布的,它是作为上述的一部分推出的。但需要一个初始姿势才能开始工作。map->odomnav2_bringupamcl
为此,请单击上方工具栏上的“2D 姿势估计”(绿色箭头之一),并通过在 RViz 中的地图上单击并拖动来根据凉亭(位置和标题)提供当前姿势。您应该尽可能精确(但小错误没问题)。
一旦你这样做了,这应该是新的视图——
现在,我们有了自主导航所需的所有转换:map->odom->base_link
- 导航
从底部开始,我们在这里;)
让我们导航!
要命令机器人自主移动,请转到 RViz 并单击 .现在,在 RViz 中的目的地上单击(用于位置)并拖动(用于方向)。下一个?观看凉亭里的魔术!Nav2 Goal
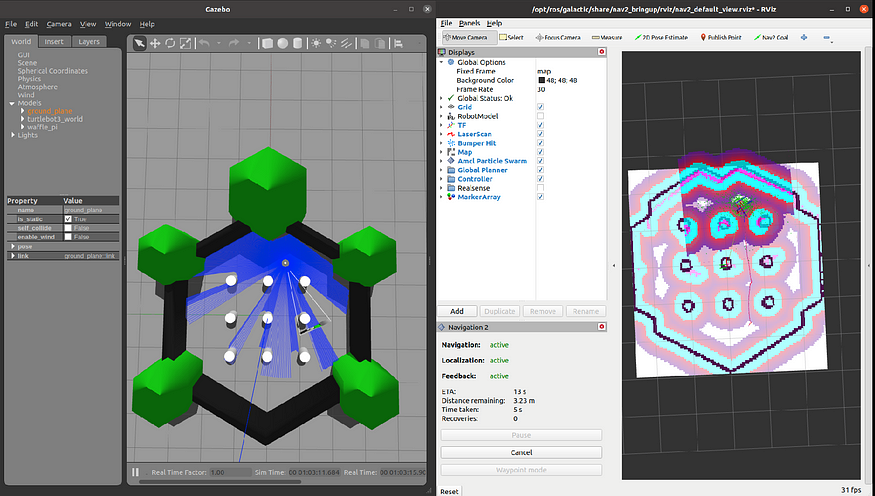
你将看到 nav2 规划了一条路径(本地 + 全局)并开始移动机器人。如果这让你开心,你可以继续提供更多的 Nav2 目标!
那么,我们已经成功地使用 Nav2 为 TurtleBot3 设置了自主导航,那就是本文的全部目标。
后记
你接下来问什么?理想情况下,我想用一个物理的TurtleBot继续这个系列。也许我众包了一个TurtleBot。也许别的东西。我很想知道你想要什么。我们可以一起想办法!