0。总结
之前思考了2种拟合平面的方式
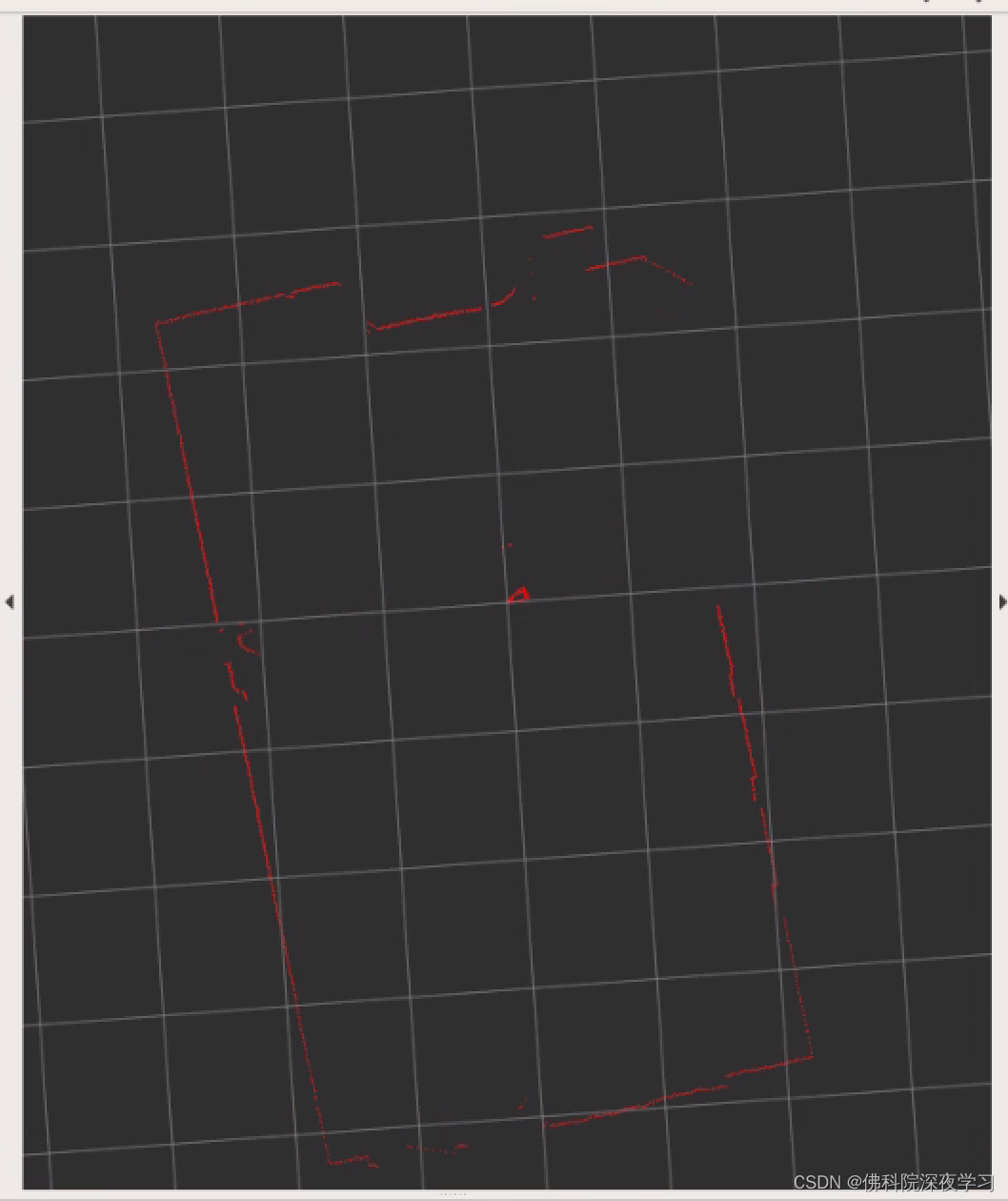
1。ransan 随机取样拟合平面
2。特征值分解特征向量,最小特征值就是法向量
其中方法一误差较小,毕竟随机采样的方式可以忽略误差点。而特征值分解的方式如果误差较大,那么得到的结果非常不好
1。扩展
https://www.ilikebigbits.com/2015_03_04_plane_from_points.html
这篇文章说,通过求协方差矩阵就可以更好的拟合平面
这个文章的重点是他假设c=1 也就是c不能等于0。也就是平面的法向量的z轴不能为0
然后求得 a b d 这样就求得了平面方程
ax+by+cz+d=0
但是看代码发现他还要求的最大值?
这是为了避免假设不成立。所以他计算了3次。
假设a=1 ,假设b=1 ,假设c=1。通过这种方式求了3次。获取最大值保证法向量的xyz轴分量假设不为0的情况
然后求得法向量
但是这个法向量和通过协方差矩阵求的还是有差异。具体的取舍就看大家了
2。代码
def getplanefrompoints(points):centroid = np.mean(points, axis=0)r = points - centroidxx = np.sum(r[:, 0] * r[:, 0])xy = np.sum(r[:, 0] * r[:, 1])xz = np.sum(r[:, 0] * r[:, 2])yy = np.sum(r[:, 1] * r[:, 1])yz = np.sum(r[:, 1] * r[:, 2])zz = np.sum(r[:, 2] * r[:, 2])det_x = yy * zz - yz * yzdet_y = xx * zz - xz * xzdet_z = xx * yy - xy * xyif det_x > det_y and det_x > det_z:vecC = (det_x, xz * yz - xy * zz, xy * yz - xz * yy)elif det_y > det_z:vecC = (xz * yz - xy * zz, det_y, xy * xz - yz * xx)else:vecC = (xy * yz - xz * yy, xy * xz - yz * xx, det_z)vecC = vecC / np.linalg.norm(vecC)d = -vecC.dot(centroid)return vecC
3。特征值求解原理
3。1 jacobi
Jacobi 方法是一种迭代法,用于计算对称矩阵的特征值和特征向量。它的基本思想是通过一系列相似变换,逐步将对称矩阵对角化,使得非对角线上的元素逐渐趋于零。以下是 Jacobi 方法的基本原理:
-
选择旋转角度: 在每一次迭代中,Jacobi 方法会选择一个最大的非对角线元素,然后计算旋转角度。旋转角度的选择有多种方法,一种常见的是选取使得旋转后的非对角线元素为零的角度。
-
构造旋转矩阵: 利用选择的旋转角度,构造一个旋转矩阵。这个旋转矩阵是一个正交矩阵,它的转置等于它的逆。
-
相似变换: 将原矩阵通过相似变换,即左乘和右乘旋转矩阵,得到一个新的矩阵。这个新矩阵在对角线上的元素更接近特征值。
-
迭代: 重复以上步骤,直到矩阵的非对角线元素足够小,或者达到预定的迭代次数。
Jacobi 方法的优点是简单易懂,容易实现,并且适用于小型矩阵。然而,它的缺点是收敛速度相对较慢,尤其是对于大型矩阵。在实际应用中,更高效的算法(如QR分解、Lanczos 方法等)通常会被使用,以便更快地计算特征值和特征向量。
3。2对角化
对角化是线性代数中的一个重要概念,它涉及将一个矩阵转换为对角矩阵的过程。对角化使得矩阵的很多运算变得更加简单,特别是计算矩阵的幂次、矩阵指数和矩阵函数等操作。
对于一个 (n \times n) 的方阵 (A),如果存在一个可逆矩阵 (P) 使得 (P^{-1}AP) 是一个对角矩阵,即:
[ P^{-1}AP = D ]
其中,(D) 是一个对角矩阵,其对角线上的元素是 (A) 的特征值。这样的矩阵 (P) 被称为 (A) 的特征向量矩阵,而 (D) 则是 (A) 的特征值矩阵。
对角化的步骤如下:
-
计算特征值: 找到矩阵 (A) 的特征值 (\lambda).
-
计算特征向量: 对于每个特征值,找到对应的特征向量 (\mathbf{v}).
-
构造矩阵 (P): 将特征向量按列排列成矩阵 (P).
-
对角化: 计算 (P^{-1}AP).
对角化的好处在于,对角矩阵的幂次运算非常简单,因为对角矩阵的幂次就是每个对角元素的幂次。这对于某些数值计算和线性代数的问题是非常有用的。
在实际应用中,对角化不一定对所有矩阵都可行。可对角化的矩阵被称为可对角化矩阵,而对于某些矩阵,它们可能不可对角化。
3。3对角矩阵
对角矩阵是一种特殊形式的矩阵,其中除了主对角线上的元素之外,所有其他元素都为零。一个 (n \times n) 的对角矩阵可以表示为:
[
D = \begin{bmatrix}
d_{1} & 0 & \cdots & 0 \
0 & d_{2} & \cdots & 0 \
\vdots & \vdots & \ddots & \vdots \
0 & 0 & \cdots & d_{n}
\end{bmatrix}
]
其中 (d_{1}, d_{2}, \ldots, d_{n}) 是对角线上的元素。
对角矩阵具有一些有趣的性质,使得它们在线性代数中非常有用。以下是一些关于对角矩阵的重要性质:
-
幂次运算简化: 对角矩阵的幂次运算非常简单。如果 (D) 是对角矩阵,那么 (D^k) 的每个对角元素就是 (d_{i}^k)。
-
特征值和特征向量: 对角矩阵的特征值就是它的对角元素,而每个对角元素本身就是对应的特征向量。
-
可逆性: 对角矩阵是可逆的当且仅当每个对角元素都不为零。
-
乘法和加法: 对角矩阵的乘法和加法操作都很简单,因为大部分元素都是零。
对角矩阵在许多数学和工程应用中经常出现,特别是在对角化矩阵的概念中。对角化是将一个矩阵转换为对角矩阵的过程,便于处理矩阵的一些运算。
3。4 python实现
import numpy as npdef jacobi_eigenvalue(A, tol=1e-10, max_iter=1000):"""Jacobi 方法求解对称矩阵的特征值和特征向量Parameters:- A: 对称矩阵- tol: 迭代收敛的容忍度- max_iter: 最大迭代次数Returns:- eigenvalues: 特征值数组- eigenvectors: 特征向量矩阵,每一列是对应的特征向量"""n = A.shape[0]eigenvalues = np.diag(A).copy() # 初始时取矩阵的对角线元素作为特征值的初始估计eigenvectors = np.eye(n) # 初始化特征向量矩阵为单位矩阵iter_count = 0while iter_count < max_iter:# 找到最大的非对角元素max_off_diag = np.max(np.abs(np.triu(A, k=1)))if max_off_diag < tol:break # 收敛条件# 找到最大非对角元素的位置indices = np.where(np.abs(A) == max_off_diag)i, j = indices[0][0], indices[1][0]# 计算旋转角度if A[i, i] == A[j, j]:theta = np.pi / 4else:theta = 0.5 * np.arctan(2 * max_off_diag / (A[i, i] - A[j, j]))# 构造旋转矩阵rotation_matrix = np.eye(n)rotation_matrix[i, i] = np.cos(theta)rotation_matrix[j, j] = np.cos(theta)rotation_matrix[i, j] = -np.sin(theta)rotation_matrix[j, i] = np.sin(theta)# 进行相似变换A = rotation_matrix.T @ A @ rotation_matrixeigenvectors = eigenvectors @ rotation_matrixiter_count += 1return eigenvalues, eigenvectors# 生成一个对称矩阵作为例子
A = np.array([[4.0, -2.0, 2.0],[-2.0, 2.0, -4.0],[2.0, -4.0, 11.0]])eigenvalues, eigenvectors = jacobi_eigenvalue(A)
print("Eigenvalues:")
print(eigenvalues)print("\nEigenvectors:")
print(eigenvectors)