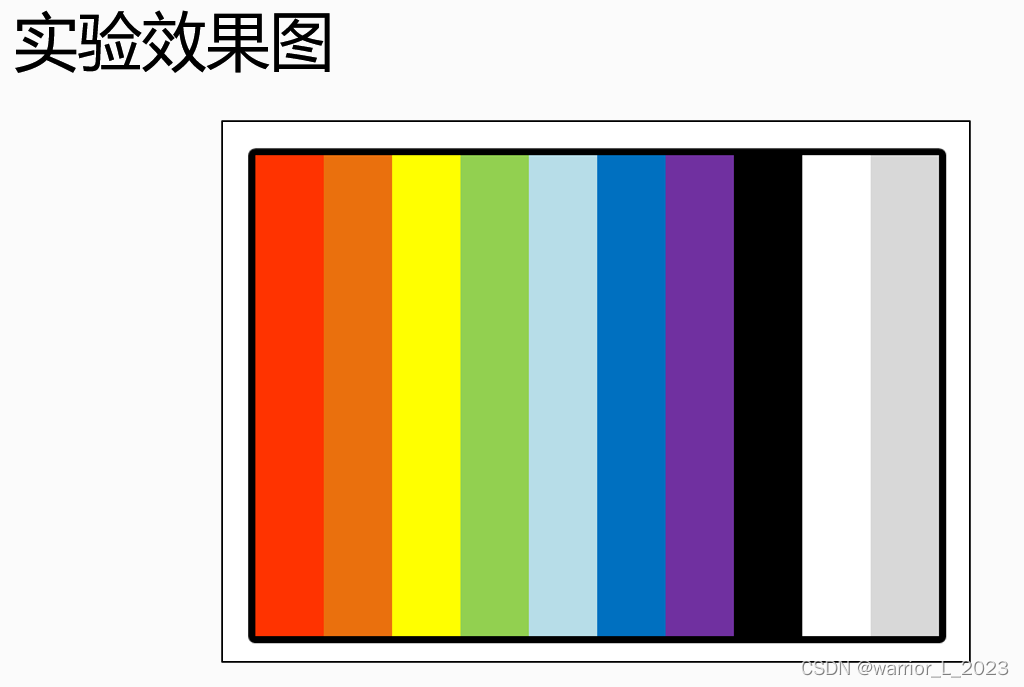
实验目标:
驱动TFT_LCD显示十色彩条。
重点掌握的知识:
1,液晶显示器,简称LCD(Liquid Crystal Display),相对于上一代CRT显示器(阴极射线管显示器),LCD显示器具有功耗低、体积小、承载的信息量大及不伤眼的优点,因而它成为了现在的主流电子显示设备,其中包括电视、电脑显示器、手机屏幕及各种嵌入式设备的显示器。薄膜晶体管型。
2,两种工作时序:
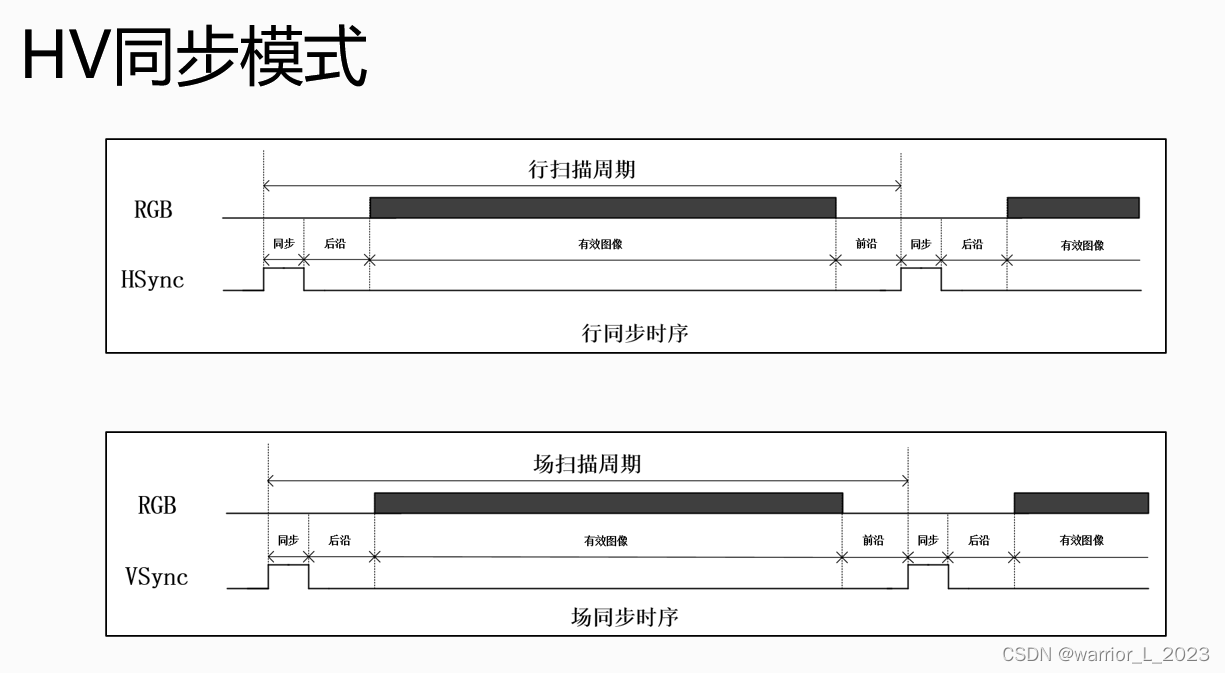
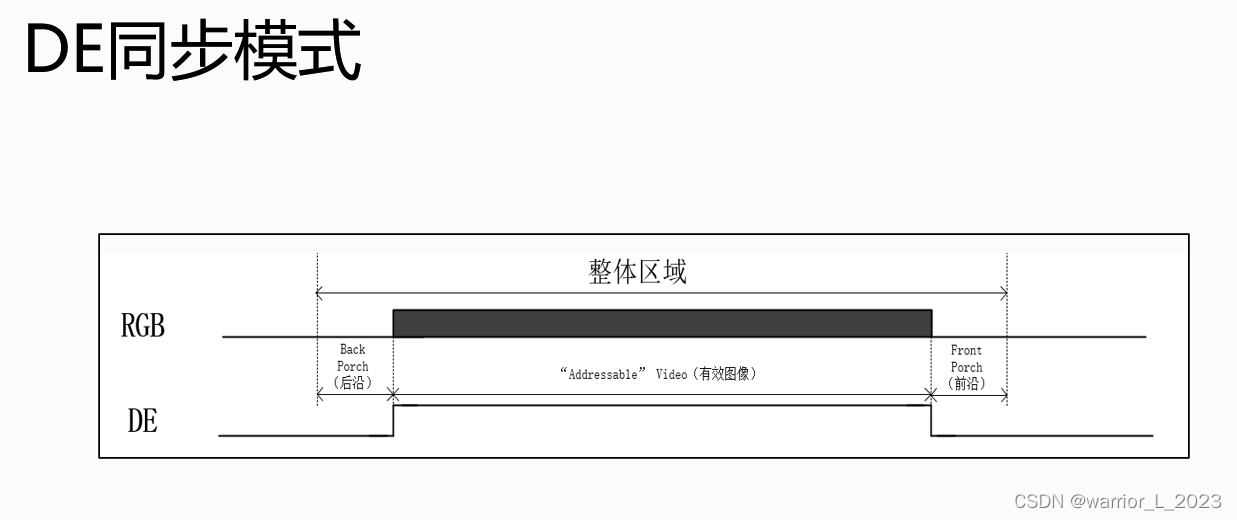

值得注意的事:
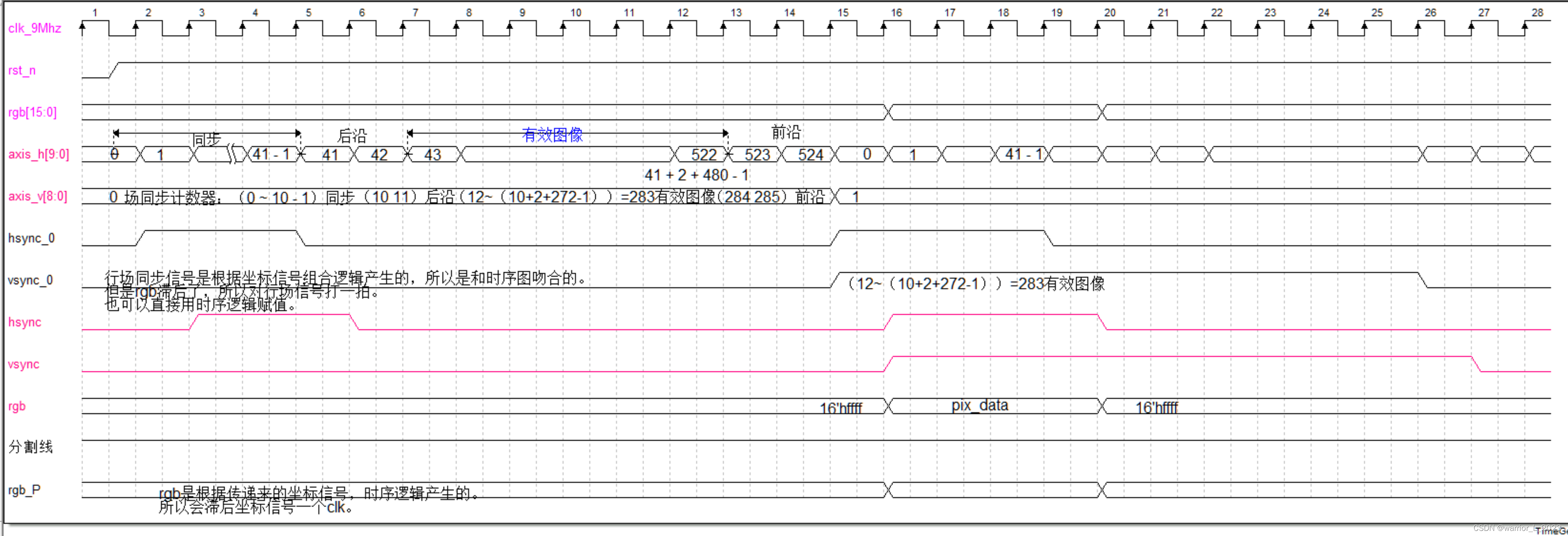
有效图像,与行场同步信号时序上要对齐。需要对行场同步信号打一拍,或者直接使用时序逻辑赋值。在时序图上有更直观的说明。
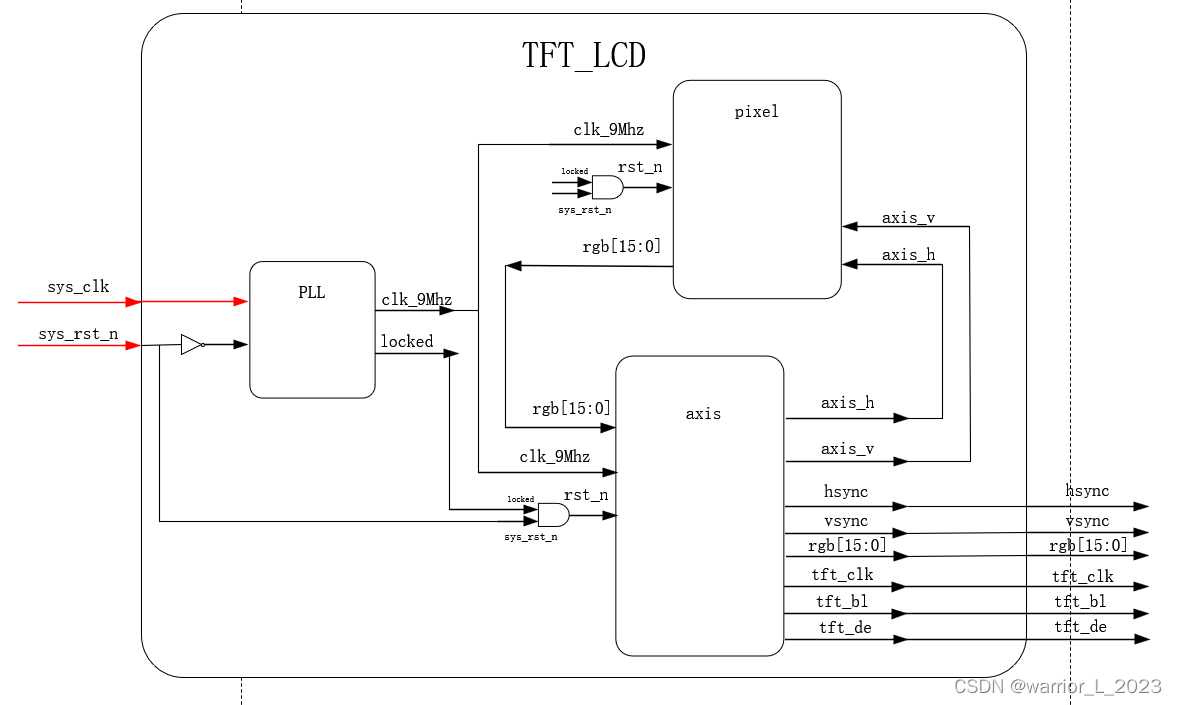
模块框图:
时序图:
代码:
module axis(input wire clk_9Mhz ,input wire rst_n ,input wire [15:0] rgb ,output reg hsync ,output reg vsync ,output reg [9:0] axis_h ,output reg [8:0] axis_v ,output wire [15:0] rgb_tft ,output wire tft_clk ,output wire tft_bl
);// wire signal definewire hsync_0 ;wire vsync_0 ;// parameterparameter TOTAL_H = 10'd525 ,TOTAL_V = 9'd286 ,SYNC_H = 10'd41 , // 同步synchronizationSYNC_V = 9'd10 ; /*****************************************************************************************/assign hsync_0 = (axis_h >= 0 && axis_h <= (SYNC_H - 1'b1)) ? 1'b1 : 1'b0 ;assign vsync_0 = (axis_v >= 0 && axis_v <= (SYNC_V - 1'b1)) ? 1'b1 : 1'b0 ;// output signalassign tft_clk = clk_9Mhz ;assign tft_bl = rst_n ;always @(posedge clk_9Mhz or negedge rst_n) beginif(~rst_n) axis_h <= 10'd0 ;else if(axis_h == TOTAL_H - 1'b1)axis_h <= 10'd0 ;else axis_h <= axis_h + 1'b1 ;endalways @(posedge clk_9Mhz or negedge rst_n) beginif(~rst_n) axis_v <= 9'd0 ;else if((axis_h == TOTAL_H - 1'b1) && (axis_v == TOTAL_V - 1'b1))axis_v <= 9'd0 ;else if(axis_h == TOTAL_H - 1'b1)axis_v <= axis_v + 1'b1 ;else axis_v <= axis_v ;endalways @(posedge clk_9Mhz or negedge rst_n) beginif(~rst_n) beginhsync <= 1'b0 ;vsync <= 1'b0 ;end else beginhsync <= hsync_0 ;vsync <= vsync_0 ;endendassign rgb_tft = rgb ;endmodulemodule pixel(input wire clk_9Mhz ,input wire rst_n ,input wire [9:0] axis_h ,input wire [8:0] axis_v ,output wire tft_de ,output reg [15:0] rgb
);// parameterparameter TOTAL_H = 10'd525 ,TOTAL_V = 9'd286 ,SYNC_H = 10'd41 , // 同步synchronizationSYNC_V = 9'd10 ,BACK_H = 10'd2 ,BACK_V = 9'd2 ,VALI_H = 10'd480 ,VALI_V = 9'd272 ,FRON_H = 10'd2 , // 前沿frontFRON_V = 9'd2 ;parameter RED = 16'hF800 ,ORANGE = 16'hFC00 ,YELLOW = 16'hFFe0 ,GREEN = 16'h07e0 ,QING = 16'h07FF ,BLUE = 16'h001F ,PURPLE = 16'hF81F ,BLACK = 16'h0000 ,WHITE = 16'hFFFF ,GRAY = 16'hD69A ;// wire signal definewire valid_rgb ;reg valid_rgb_reg1 ;always @(posedge clk_9Mhz or negedge rst_n) if(~rst_n)valid_rgb_reg1 <= 1'b0 ;else valid_rgb_reg1 <= valid_rgb ;assign valid_rgb = (axis_h >= (SYNC_H+BACK_H) && (axis_h <= (SYNC_H+BACK_H+VALI_H-1'b1)) && (axis_v >= (SYNC_V+BACK_V) && (axis_v <= (SYNC_V+BACK_V+VALI_V-1'b1)))) ? 1'b1 : 1'b0 ;// output signalalways @(posedge clk_9Mhz or negedge rst_n) beginif(~rst_n) rgb <= WHITE ; else if(valid_rgb)beginif((axis_h >= (SYNC_H+BACK_H)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10-1'b1)))rgb <= RED ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*2-1'b1)))rgb <= ORANGE ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*2)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*3-1'b1)))rgb <= YELLOW ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*3)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*4-1'b1)))rgb <= GREEN ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*4)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*5-1'b1)))rgb <= QING ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*5)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*6-1'b1)))rgb <= BLUE ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*6)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*7-1'b1)))rgb <= PURPLE ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*7)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*8-1'b1)))rgb <= BLACK ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*8)) && (axis_h <= (SYNC_H+BACK_H+VALI_H/10*9-1'b1)))rgb <= WHITE ;else if((axis_h >= (SYNC_H+BACK_H+VALI_H/10*9)) && (axis_h <= (SYNC_H+BACK_H+VALI_H-1'b1)))rgb <= GRAY ;else rgb <= WHITE ;end else rgb <= WHITE ;endassign tft_de = valid_rgb_reg1 ;
endmodule
module top(input wire sys_clk ,input wire sys_rst_n ,output wire tft_de ,output wire tft_clk ,output wire tft_bl ,output wire hsync ,output wire vsync ,output wire [15:0] rgb_tft
);// 例化间连线wire clk_9Mhz ;wire rst_n ;wire [15:0] rgb ;wire [ 9:0] axis_h ;wire [ 8:0] axis_v ;pll_9Mhz pll_9Mhz_insert(.sys_rst_n ( sys_rst_n ) ,.areset ( ~sys_rst_n ) ,.inclk0 ( sys_clk ) ,.c0 ( clk_9Mhz ) ,.locked ( rst_n )
);axis axis_insert(.clk_9Mhz ( clk_9Mhz ) ,.rst_n ( rst_n ) ,.rgb ( rgb ) ,.hsync ( hsync ) ,.vsync ( vsync ) ,.axis_h ( axis_h ) ,.axis_v ( axis_v ) ,.tft_clk ( tft_clk ) ,.tft_bl ( tft_bl ) , .rgb_tft ( rgb_tft )
);pixel pixel_insert(.clk_9Mhz ( clk_9Mhz ) ,.rst_n ( rst_n ) ,.axis_h ( axis_h ) ,.axis_v ( axis_v ) ,.tft_de ( tft_de ) ,.rgb ( rgb )
);endmodule`timescale 1ns/1ns
module test_top();reg sys_clk ;reg sys_rst_n ;wire hsync ;wire vsync ;wire [15:0] rgb_tft ;wire tft_de ;wire tft_clk ;wire tft_bl ;top top_inst(.sys_clk ( sys_clk ) ,.sys_rst_n ( sys_rst_n ) ,.tft_de ( tft_de ) ,.tft_clk ( tft_clk ) ,.tft_bl ( tft_bl ) ,.hsync ( hsync ) ,.vsync ( vsync ) ,.rgb_tft ( rgb_tft )
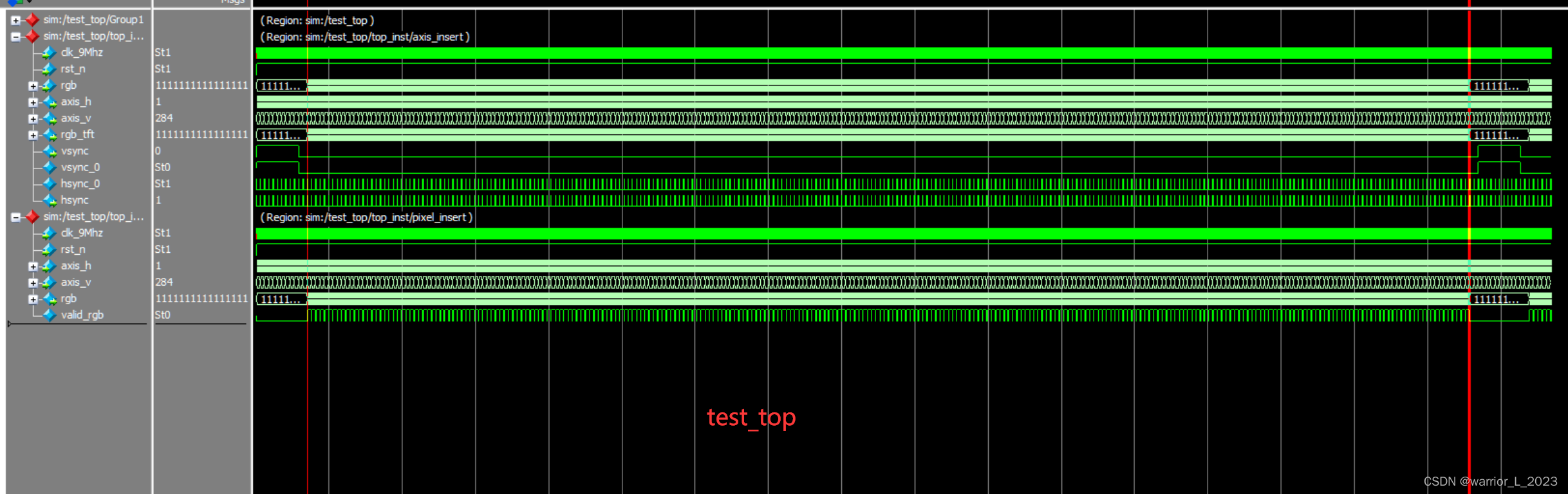
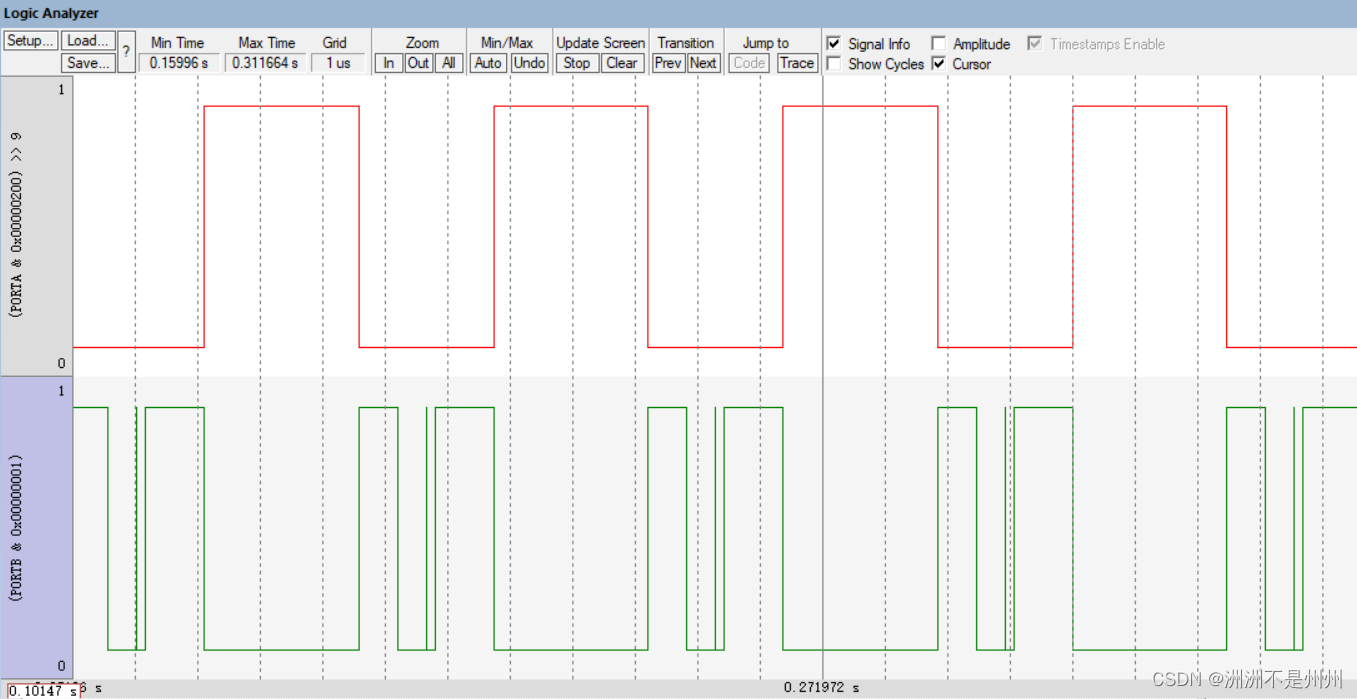
);parameter CYCLE = 20 ;initial beginsys_clk = 1'b1 ;sys_rst_n = 1'b0 ;#(CYCLE) ;sys_rst_n = 1'b1 ;endalways #(CYCLE / 2) sys_clk = ~sys_clk ;endmodule仿真波形: