数据包
把属于同一批的数据进行打包和分割,方便接收方进行识别
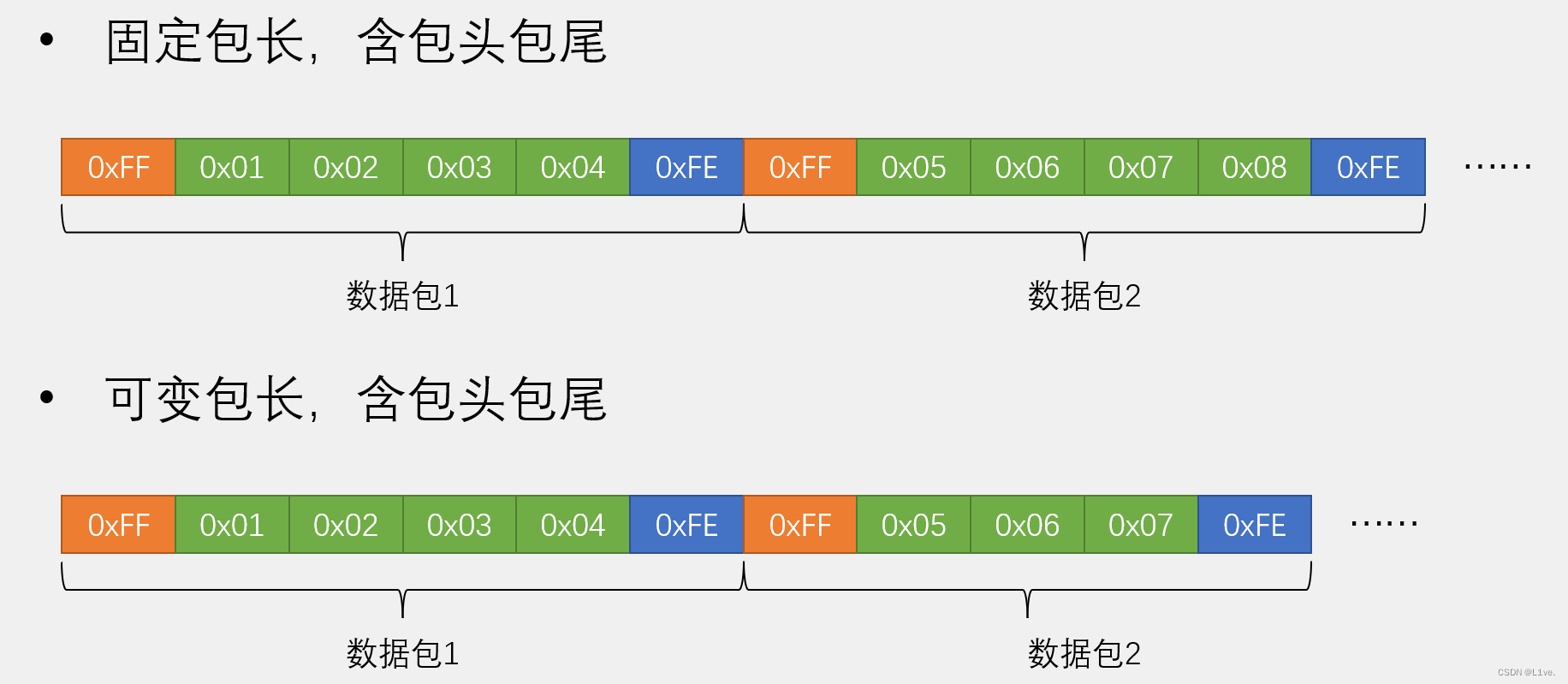
HEX数据包
思路:一个数据规定四个字节,以0xFF为包头,0xFE为包尾,当检测到0xFF时,接下来四个数据就是数据,接收到0xFE时,置一个接收完毕标志位。
这样存在几个问题需要解决:
问题1:包头包尾和数据载荷重复的问题
解决方法:
一、限制载荷数据的范围,不超过包头包尾
二、严格限制数据包的长度
三、增加包头包尾的数量,且组合方式为载荷数据不会出现的情况
问题2:包头包尾并不是全都需要的,可以只要包头不要包尾(只能用于固定包长的情况)
问题3:各种数据转换为字节流的问题,这里的数据包都是一个个字节组成的,如果想发送16位的整形数据,32位的整形数据,float,double,甚至是结构体,其实都没问题,因为他们内部也都是由一个个字节组成的,只需要用uint8_t的指针指向它,把它们当做一个字节数组发送就行了
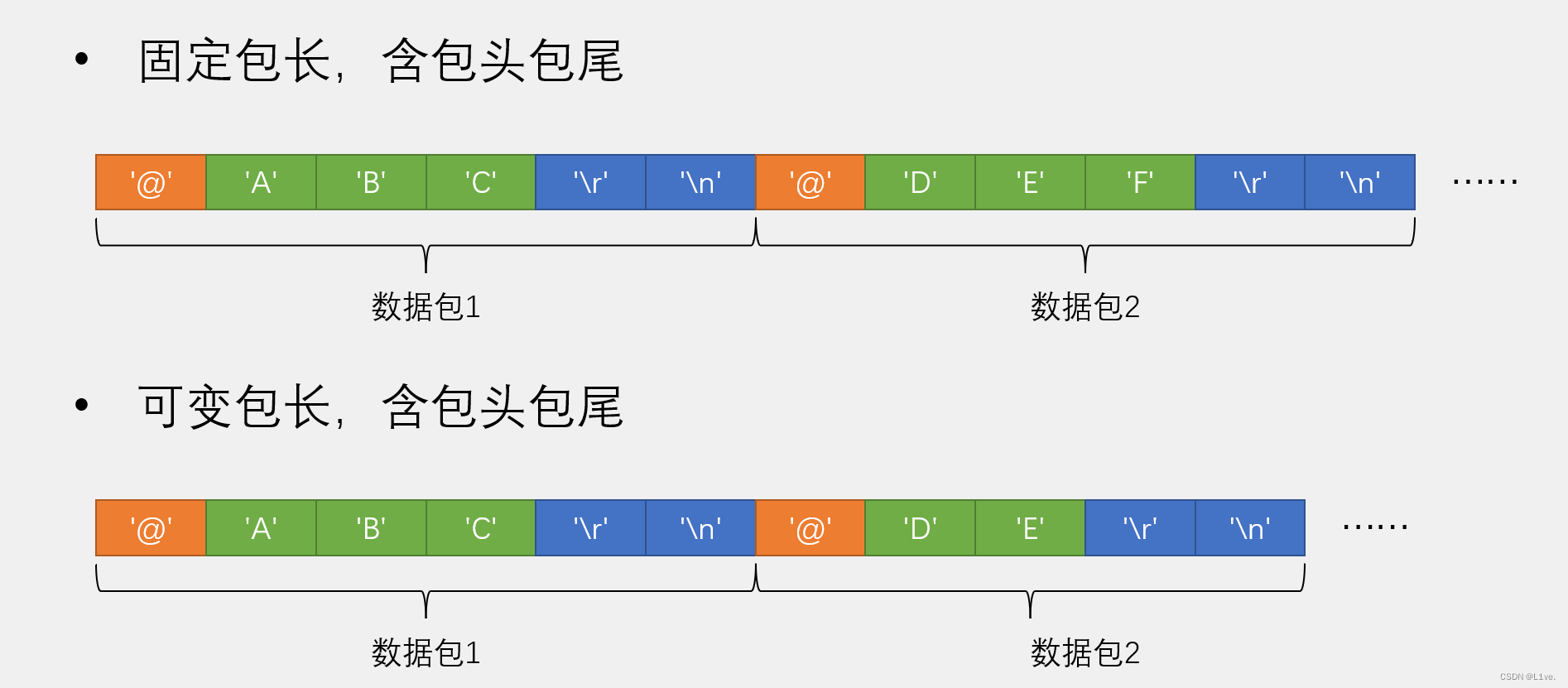
文本数据包
两者优缺点
HEX数据包:传输最直接,解析数据非常简单,比较适合一些模块发送原始的数据,比如一些使用串口通信的陀螺仪、温湿度传感器,缺点是灵活性不足、载荷容易和包头包尾重复;
文本数据包:数据直观,易理解,非常灵活,比较适合一些输入指令进行人机交互的场合,比如蓝牙模块常用的AT指令,CNC和3D打印机常用的G代码,缺点是解析效率低
数据包的发送
HEX数据包的发送:定义一个数组,填充数据,然后用Send函数一发即可
文本数据包的发送:定义一个字符串.......
数据包的接收
如何接收固定包长的HEX数据包
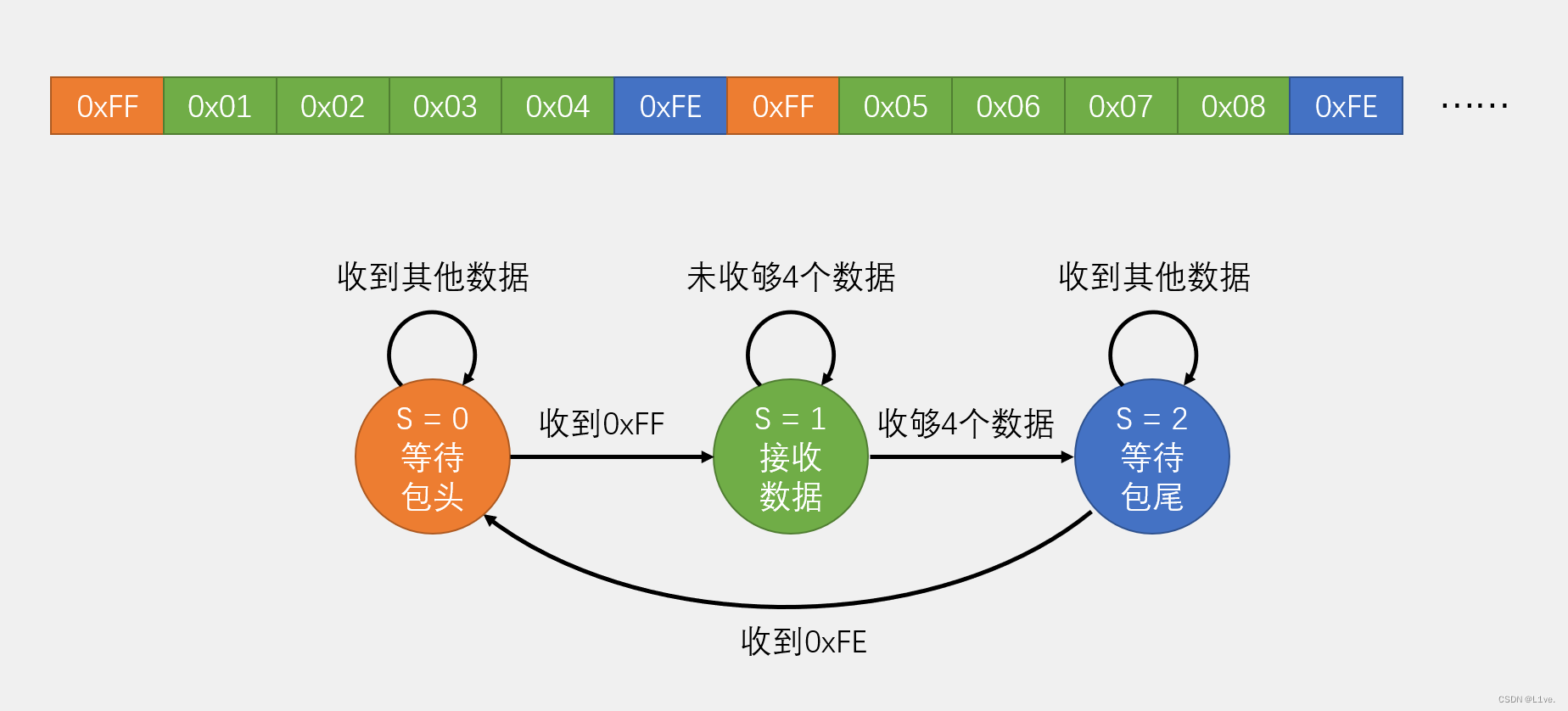
在之前的代码中,串口每接收到一个数据,程序都会进入一个中断,在中断中获取到这一个字节,在这之后会退出中断,所以每拿到一个数据,都是一个独立的过程,对于数据包来说,很明显它具有前后关联性——包头之后是数据,数据之后是包尾,对应包头,数据和包尾这三种状态,我们都需要有不同的处理逻辑,在程序中我们需要设计一个能记住不同状态的机制,在不同状态执行不同的操作,同时还要进行状态的合理转移,这种程序思维被称为“状态机”。
如图是状态转移图,我们设定三种状态——1、等待包头,2、接收数据,3、等待包尾
等待包头状态下,S=0,直到接收到0xFF时,把S置1,然后进入接收数据状态,再然后直到收集满4个数据,并把数据存储到数组中后,把S置2,然后进入等待包尾状态,直到接收到包尾0xFE后,把S置0,进入等待包头状态。
不固定包长的文本数据包接收
代码实操
串口收发HEX数据包
发:
//发送数据包
void Serial_SendPacket(void)
{Serial_SendByte(0xFF);Serial_SendArray(Serial_TXPacket, 4);Serial_SendByte(0xFE);
}#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"uint16_t Data;int main(void)
{OLED_Init();Serial_Init();Serial_TXPacket[0]=0x01;Serial_TXPacket[1]=0x02;Serial_TXPacket[2]=0x03;Serial_TXPacket[3]=0x04;Serial_SendPacket();while(1){}
}收:
uint8_t Serial_RXFlag;
uint16_t Serial_TXPacket[4];
uint16_t Serial_RXPacket[4];//用于获取自建的标志位
uint8_t Serial_GetRXFlag(void)
{if (Serial_RXFlag == 1){//检测标志位位1后立马清零//以便下次获取串口接收值Serial_RXFlag = 0;return 1;}return 0;
}//中断函数
void USART1_IRQHandler(void)
{static uint8_t RXState = 0;static uint8_t pRXPacket = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){uint8_t RXData = USART_ReceiveData(USART1);if (RXState == 0){if (RXData == 0xFF){RXState = 1;//给接收数据的数组下标清零//在这清零能保证每次接收数据时下标正确pRXPacket = 0;}}else if (RXState == 1){//把接收到的数据存入数组中Serial_RXPacket[pRXPacket] = RXData;pRXPacket ++;if (pRXPacket >= 4){RXState = 2;}}else if (RXState == 2){if (RXData == 0xFE){RXState = 0;Serial_RXFlag = 1;}}USART_ClearITPendingBit(USART1, USART_IT_RXNE);}
}
两个数组还要在.h文件中加上extern,以便在主函数中直接修改或者调用其值
即使载荷数据和包头包尾重复都没有影响
隐藏的问题
RXPacket是一个同时被写入又同时被读出的数组,在中断函数中,我们会依次写入它,在主函数中,我们又依次读出它,这会造成数据包之间的数据混在一起,比如读出的过程太慢了,可能会造成前面两个数据是新的,后面两个数据是之前的数据,即我们读出的数据可能一部分属于上一个数据包,解决办法:在接收部分加入判断,在每个数据包读取处理完毕后,再接收下一个数据包(线程安全),但其实这个问题也是相对实际情况而言的,可以不处理,也可能必须要处理。
再添加一个功能——按下按键TXPacket中的数据都+1,用于检测发出数据包程序是否正确运行
在主函数中修改即可,顺便优化代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"uint16_t Data;int main(void)
{OLED_Init();Key_Init();Serial_Init();OLED_ShowString(1, 1, "TXPacket");OLED_ShowString(3, 1, "RXPacket"); Serial_TXPacket[0]=0x01;Serial_TXPacket[1]=0x02;Serial_TXPacket[2]=0x03;Serial_TXPacket[3]=0x04;Serial_SendPacket();while(1){if (Key_GetNum()==1){Serial_TXPacket[0]++;Serial_TXPacket[1]++;Serial_TXPacket[2]++;Serial_TXPacket[3]++;Serial_SendPacket();OLED_ShowHexNum(2, 1, Serial_TXPacket[0], 2);OLED_ShowHexNum(2, 4, Serial_TXPacket[1], 2);OLED_ShowHexNum(2, 7, Serial_TXPacket[2], 2);OLED_ShowHexNum(2, 10, Serial_TXPacket[3], 2);}if (Serial_GetRXFlag() == 1){OLED_ShowHexNum(4, 1, Serial_RXPacket[0], 2);OLED_ShowHexNum(4, 4, Serial_RXPacket[1], 2);OLED_ShowHexNum(4, 7, Serial_RXPacket[2], 2);OLED_ShowHexNum(4, 10, Serial_RXPacket[3], 2);}}
}
就可以实现按一下按钮,串口就输出一组数据包,且这组数据包每个数据逐渐递增
然后在发送区发送的数据在OLED中显示
串口收发文本数据包
接收数据包直接使用SendString即可,所以可以把TXPacket相关函数删去
然后修改一下中断函数的判断条件
//以下皆用于接收数据包
uint8_t Serial_RXFlag;
char Serial_RXPacket[100];
//用于获取自建的标志位
uint8_t Serial_GetRXFlag(void)
{if (Serial_RXFlag == 1){//检测标志位位1后立马清零//以便下次获取串口接收值Serial_RXFlag = 0;return 1;}return 0;
}//中断函数
void USART1_IRQHandler(void)
{static uint8_t RXState = 0;static uint8_t pRXPacket = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){char RXData = USART_ReceiveData(USART1);if (RXState == 0){if (RXData == '@'){RXState = 1;//给接收数据的数组下标清零//在这清零能保证每次接收数据时下标正确pRXPacket = 0;}}else if (RXState == 1){if (RXData == '\r'){RXState = 2;}else{//把接收到的数据存入数组中Serial_RXPacket[pRXPacket] = RXData;pRXPacket ++;}}else if (RXState == 2){if (RXData == '\n'){RXState = 0;//标志位'\0'标志着字符串的结束Serial_RXPacket[pRXPacket] = '\0';Serial_RXFlag = 1;}}USART_ClearITPendingBit(USART1, USART_IT_RXNE);}
}
主函数中实验一下
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include <string.h>int main(void)
{OLED_Init();LED_Init();Serial_Init();OLED_ShowString(1, 1, "TXPacket");OLED_ShowString(3, 1, "RXPacket"); while(1){if (Serial_GetRXFlag() == 1){OLED_ShowString(4, 1, " ");OLED_ShowString(4, 1, Serial_RXPacket);}}
}
接下来就应该实现通过串口输入文本来控制LED的亮灭,并通过OLED上有所反映
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include <string.h>int main(void)
{OLED_Init();LED_Init();Serial_Init();OLED_ShowString(1, 1, "TXPacket");OLED_ShowString(3, 1, "RXPacket"); while(1){if (Serial_GetRXFlag() == 1){OLED_ShowString(4, 1, " ");OLED_ShowString(4, 1, Serial_RXPacket);if(strcmp(Serial_RXPacket, "LED_ON") == 0){LED_On();OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "LED_ON_OK");Serial_SendString("LED_ON_OK\r\n");}else if (strcmp(Serial_RXPacket, "LED_OFF") == 0){LED_Off();OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "LED_OFF_OK");Serial_SendString("LED_OFF_OK\r\n");}else{OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "Error");Serial_SendString("Error\r\n");}}}
}
这样就可以实现目标了
但是还会有个问题,如果连续发送数据包,程序处理不及时,可能会导致数据包错位,这时候我们就需要添加一个程序使其在上一个数据包未处理完成,就不接受新的数据包的功能。
只需把Serial_GetRXFlag(void)函数删去,在中断函数的第一个判断语句中修改为
if (RXData == '@' && Serial_RXFlag == 0){RXState = 1;//给接收数据的数组下标清零//在这清零能保证每次接收数据时下标正确pRXPacket = 0;}然后再在主函数if条件修改为
if (Serial_RXFlag == 1)然后再在其最后添加
Serial_RXFlag = 0;即可
或者可以再定义一个指令缓存区,把接收好的字符串放在这个指令缓存区里排队,这样处理起来更有条理