目录
系统要求
系统设置
设置区域
启用所需的存储库
安装开发工具
构建 ROS 2
获取 ROS 2 代码
使用 rosdep 安装依赖项
安装额外的 RMW 实现(可选)
在工作区构建代码
设置环境
尝试一些例子
下一步
备用编译器
Clang
保持最新状态
故障排除
卸载
系统要求
当前基于 Debian 的 Jazzy Jalisco 目标平台是:
一级:Ubuntu Linux - Noble (24.04) 64 位
三级:Ubuntu Linux - Jammy (22.04) 64 位
第三层:Debian Linux - Bookworm(12)64 位
根据 REP 2000 定义。
系统设置
设置区域
请确保您有一个支持 UTF-8 的区域设置。如果您处于最小化环境中(例如 docker 容器),区域设置可能是像 POSIX 这样的最小化设置。我们使用以下设置进行测试。不过,如果您使用的是不同的 UTF-8 支持区域设置,也应该没问题。
locale # check for UTF-8sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # verify settingscxy@ubuntu2404-cxy:~$ locale
LANG=zh_CN.UTF-8
LANGUAGE=zh_CN:en
LC_CTYPE="en_US.UTF-8"
LC_NUMERIC="en_US.UTF-8"
LC_TIME="en_US.UTF-8"
LC_COLLATE="en_US.UTF-8"
LC_MONETARY="en_US.UTF-8"
LC_MESSAGES="en_US.UTF-8"
LC_PAPER="en_US.UTF-8"
LC_NAME="en_US.UTF-8"
LC_ADDRESS="en_US.UTF-8"
LC_TELEPHONE="en_US.UTF-8"
LC_MEASUREMENT="en_US.UTF-8"
LC_IDENTIFICATION="en_US.UTF-8"
LC_ALL=en_US.UTF-8启用所需的存储库
您需要将 ROS 2 apt 仓库添加到您的系统中。
首先确保启用了 Ubuntu Universe 仓库。
sudo apt install software-properties-common
sudo add-apt-repository universecxy@ubuntu2404-cxy:~$ sudo apt install software-properties-common
sudo add-apt-repository universe
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
software-properties-common 已经是最新版 (0.99.48)。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。
正在添加组件‘universe’到所有软件源。
按 [ENTER] 继续,或按 Ctrl-c 取消。
命中:1 https://mirrors.tuna.tsinghua.edu.cn/ubuntu noble-security InRelease
命中:2 https://packages.microsoft.com/repos/edge stable InRelease
命中:3 http://security.ubuntu.com/ubuntu noble-security InRelease
命中:4 http://archive.ubuntu.com/ubuntu noble InRelease
命中:5 http://archive.ubuntu.com/ubuntu noble-updates InRelease
正在读取软件包列表... 完成现在使用 apt 添加 ROS 2 GPG 密钥。
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg然后将该存储库添加到您的源列表中。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null安装开发工具
sudo apt update && sudo apt install -y \python3-flake8-blind-except \python3-flake8-class-newline \python3-flake8-deprecated \python3-mypy \python3-pip \python3-pytest \python3-pytest-cov \python3-pytest-mock \python3-pytest-repeat \python3-pytest-rerunfailures \python3-pytest-runner \python3-pytest-timeout \ros-dev-tools构建 ROS 2
获取 ROS 2 代码
创建一个工作区并克隆所有仓库:
mkdir -p ~/ros2_jazzy/src #目录 admin:///home/cxy/ros2_jazzy/src
cd ~/ros2_jazzy
vcs import --input https://raw.githubusercontent.com/ros2/ros2/jazzy/ros2.repos srccxy@ubuntu2404-cxy:~/ros2_jazzy$ vcs import --input https://raw.githubusercontent.com/ros2/ros2/jazzy/ros2.repos src
/usr/bin/vcs:6: DeprecationWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.htmlfrom pkg_resources import load_entry_point
...........E....................................................................E..........................
=== src/ament/ament_cmake (git) ===
正克隆到 '.'...
=== src/ament/ament_index (git) ===
正克隆到 '.'...
=== src/ament/ament_lint (git) ===
正克隆到 '.'...
=== src/ament/ament_package (git) ===
正克隆到 '.'...
=== src/ament/google_benchmark_vendor (git) ===
正克隆到 '.'...
=== src/ament/googletest (git) ===
正克隆到 '.'...
=== src/ament/uncrustify_vendor (git) ===
正克隆到 '.'...
=== src/eProsima/Fast-CDR (git) ===
正克隆到 '.'...
=== src/eProsima/Fast-DDS (git) ===
正克隆到 '.'...
注意:正在切换到 'c2a4523a21a94302298bc995057719546b72df2d'。您正处于分离头指针状态。您可以查看、做试验性的修改及提交,并且您可以在切换
回一个分支时,丢弃在此状态下所做的提交而不对分支造成影响。如果您想要通过创建分支来保留在此状态下所做的提交,您可以通过在 switch 命令
中添加参数 -c 来实现(现在或稍后)。例如:git switch -c <新分支名>或者撤销此操作:git switch -通过将配置变量 advice.detachedHead 设置为 false 来关闭此建议HEAD 目前位于 c2a4523a2 Implement copy_from_topic_qos method (#4719)
=== src/eProsima/foonathan_memory_vendor (git) ===
正克隆到 '.'...
=== src/eclipse-cyclonedds/cyclonedds (git) ===
正克隆到 '.'...
=== src/eclipse-iceoryx/iceoryx (git) ===
正克隆到 '.'...
=== src/gazebo-release/gz_cmake_vendor (git) ===
正克隆到 '.'...
=== src/gazebo-release/gz_math_vendor (git) ===
Could not determine ref type of version: fatal: 无法访问 'https://github.com/gazebo-release/gz_math_vendor.git/':gnutls_handshake() failed: The TLS connection was non-properly terminated.
=== src/gazebo-release/gz_utils_vendor (git) ===
正克隆到 '.'...
=== src/osrf/osrf_pycommon (git) ===
正克隆到 '.'...
=== src/osrf/osrf_testing_tools_cpp (git) ===
正克隆到 '.'...
=== src/ros-perception/image_common (git) ===
正克隆到 '.'...
=== src/ros-perception/laser_geometry (git) ===
正克隆到 '.'...
=== src/ros-perception/point_cloud_transport (git) ===
正克隆到 '.'...
=== src/ros-planning/navigation_msgs (git) ===
正克隆到 '.'...
=== src/ros-tooling/keyboard_handler (git) ===
正克隆到 '.'...
=== src/ros-tooling/libstatistics_collector (git) ===
正克隆到 '.'...
=== src/ros-visualization/interactive_markers (git) ===
正克隆到 '.'...
=== src/ros-visualization/python_qt_binding (git) ===
正克隆到 '.'...
=== src/ros-visualization/qt_gui_core (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_action (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_bag (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_console (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_graph (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_msg (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_plot (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_publisher (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_py_console (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_reconfigure (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_service_caller (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_shell (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_srv (git) ===
正克隆到 '.'...
=== src/ros-visualization/rqt_topic (git) ===
正克隆到 '.'...
=== src/ros-visualization/tango_icons_vendor (git) ===
正克隆到 '.'...
=== src/ros/class_loader (git) ===
正克隆到 '.'...
=== src/ros/kdl_parser (git) ===
正克隆到 '.'...
=== src/ros/pluginlib (git) ===
正克隆到 '.'...
=== src/ros/resource_retriever (git) ===
正克隆到 '.'...
=== src/ros/robot_state_publisher (git) ===
正克隆到 '.'...
=== src/ros/ros_environment (git) ===
正克隆到 '.'...
=== src/ros/ros_tutorials (git) ===
正克隆到 '.'...
=== src/ros/urdfdom (git) ===
正克隆到 '.'...
=== src/ros/urdfdom_headers (git) ===
正克隆到 '.'...
=== src/ros2/ament_cmake_ros (git) ===
正克隆到 '.'...
=== src/ros2/common_interfaces (git) ===
正克隆到 '.'...
=== src/ros2/console_bridge_vendor (git) ===
正克隆到 '.'...
=== src/ros2/demos (git) ===
正克隆到 '.'...
=== src/ros2/eigen3_cmake_module (git) ===
正克隆到 '.'...
=== src/ros2/example_interfaces (git) ===
正克隆到 '.'...
=== src/ros2/examples (git) ===
正克隆到 '.'...
=== src/ros2/geometry2 (git) ===
正克隆到 '.'...
=== src/ros2/launch (git) ===
正克隆到 '.'...
=== src/ros2/launch_ros (git) ===
正克隆到 '.'...
=== src/ros2/libyaml_vendor (git) ===
正克隆到 '.'...
=== src/ros2/message_filters (git) ===
正克隆到 '.'...
=== src/ros2/mimick_vendor (git) ===
正克隆到 '.'...
=== src/ros2/orocos_kdl_vendor (git) ===
正克隆到 '.'...
=== src/ros2/performance_test_fixture (git) ===
正克隆到 '.'...
=== src/ros2/pybind11_vendor (git) ===
正克隆到 '.'...
=== src/ros2/python_cmake_module (git) ===
正克隆到 '.'...
=== src/ros2/rcl (git) ===
正克隆到 '.'...
=== src/ros2/rcl_interfaces (git) ===
正克隆到 '.'...
=== src/ros2/rcl_logging (git) ===
正克隆到 '.'...
=== src/ros2/rclcpp (git) ===
正克隆到 '.'...
=== src/ros2/rclpy (git) ===
正克隆到 '.'...
=== src/ros2/rcpputils (git) ===
正克隆到 '.'...
=== src/ros2/rcutils (git) ===
正克隆到 '.'...
=== src/ros2/realtime_support (git) ===
正克隆到 '.'...
=== src/ros2/rmw (git) ===
正克隆到 '.'...
=== src/ros2/rmw_connextdds (git) ===
正克隆到 '.'...
=== src/ros2/rmw_cyclonedds (git) ===
正克隆到 '.'...
=== src/ros2/rmw_dds_common (git) ===
正克隆到 '.'...
=== src/ros2/rmw_fastrtps (git) ===
正克隆到 '.'...
=== src/ros2/rmw_implementation (git) ===
Could not determine ref type of version: fatal: 无法访问 'https://github.com/ros2/rmw_implementation.git/':gnutls_handshake() failed: The TLS connection was non-properly terminated.
=== src/ros2/ros2_tracing (git) ===
正克隆到 '.'...
=== src/ros2/ros2cli (git) ===
正克隆到 '.'...
=== src/ros2/ros2cli_common_extensions (git) ===
正克隆到 '.'...
=== src/ros2/ros_testing (git) ===
正克隆到 '.'...
=== src/ros2/rosbag2 (git) ===
正克隆到 '.'...
=== src/ros2/rosidl (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_core (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_dds (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_defaults (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_dynamic_typesupport (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_dynamic_typesupport_fastrtps (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_python (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_runtime_py (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_typesupport (git) ===
正克隆到 '.'...
=== src/ros2/rosidl_typesupport_fastrtps (git) ===
正克隆到 '.'...
=== src/ros2/rpyutils (git) ===
正克隆到 '.'...
=== src/ros2/rviz (git) ===
正克隆到 '.'...
=== src/ros2/spdlog_vendor (git) ===
正克隆到 '.'...
=== src/ros2/sros2 (git) ===
正克隆到 '.'...
=== src/ros2/system_tests (git) ===
正克隆到 '.'...
=== src/ros2/test_interface_files (git) ===
正克隆到 '.'...
=== src/ros2/tinyxml2_vendor (git) ===
正克隆到 '.'...
=== src/ros2/tlsf (git) ===
正克隆到 '.'...
=== src/ros2/unique_identifier_msgs (git) ===
正克隆到 '.'...
=== src/ros2/urdf (git) ===
正克隆到 '.'...
=== src/ros2/yaml_cpp_vendor (git) ===
正克隆到 '.'...cxy@ubuntu2404-cxy:~/ros2_jazzy$ vcs import --input https://raw.githubusercontent.com/ros2/ros2/jazzy/ros2.repos src
/usr/bin/vcs:6: DeprecationWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.htmlfrom pkg_resources import load_entry_point
...........................................................................................................
=== src/ament/ament_cmake (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/ament_index (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/ament_lint (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/ament_package (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/google_benchmark_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/googletest (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ament/uncrustify_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/eProsima/Fast-CDR (git) ===已经位于 '2.2.x'
您的分支与上游分支 'origin/2.2.x' 一致。
=== src/eProsima/Fast-DDS (git) ===HEAD 目前位于 c2a4523a2 Implement copy_from_topic_qos method (#4719)
=== src/eProsima/foonathan_memory_vendor (git) ===已经位于 'master'
您的分支与上游分支 'origin/master' 一致。
=== src/eclipse-cyclonedds/cyclonedds (git) ===已经位于 'releases/0.10.x'
您的分支与上游分支 'origin/releases/0.10.x' 一致。
=== src/eclipse-iceoryx/iceoryx (git) ===已经位于 'release_2.0'
您的分支与上游分支 'origin/release_2.0' 一致。
=== src/gazebo-release/gz_cmake_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/gazebo-release/gz_math_vendor (git) ===
正克隆到 '.'...
=== src/gazebo-release/gz_utils_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/osrf/osrf_pycommon (git) ===已经位于 'master'
您的分支与上游分支 'origin/master' 一致。
=== src/osrf/osrf_testing_tools_cpp (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-perception/image_common (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-perception/laser_geometry (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-perception/point_cloud_transport (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-planning/navigation_msgs (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-tooling/keyboard_handler (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-tooling/libstatistics_collector (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/interactive_markers (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/python_qt_binding (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/qt_gui_core (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_action (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_bag (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_console (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_graph (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_msg (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_plot (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_publisher (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_py_console (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_reconfigure (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_service_caller (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_shell (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_srv (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/rqt_topic (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros-visualization/tango_icons_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/class_loader (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/kdl_parser (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/pluginlib (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/resource_retriever (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/robot_state_publisher (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/ros_environment (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/ros_tutorials (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros/urdfdom (git) ===已经位于 'master'
您的分支与上游分支 'origin/master' 一致。
=== src/ros/urdfdom_headers (git) ===已经位于 'master'
您的分支与上游分支 'origin/master' 一致。
=== src/ros2/ament_cmake_ros (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/common_interfaces (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/console_bridge_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/demos (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/eigen3_cmake_module (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/example_interfaces (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/examples (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/geometry2 (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/launch (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/launch_ros (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/libyaml_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/message_filters (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/mimick_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/orocos_kdl_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/performance_test_fixture (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/pybind11_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/python_cmake_module (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rcl (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rcl_interfaces (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rcl_logging (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rclcpp (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rclpy (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rcpputils (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rcutils (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/realtime_support (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw_connextdds (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw_cyclonedds (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw_dds_common (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw_fastrtps (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rmw_implementation (git) ===
正克隆到 '.'...
=== src/ros2/ros2_tracing (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/ros2cli (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/ros2cli_common_extensions (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/ros_testing (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosbag2 (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_core (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_dds (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_defaults (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_dynamic_typesupport (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_dynamic_typesupport_fastrtps (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_python (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_runtime_py (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_typesupport (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rosidl_typesupport_fastrtps (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rpyutils (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/rviz (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/spdlog_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/sros2 (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/system_tests (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/test_interface_files (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/tinyxml2_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/tlsf (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/unique_identifier_msgs (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/urdf (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
=== src/ros2/yaml_cpp_vendor (git) ===已经位于 'jazzy'
您的分支与上游分支 'origin/jazzy' 一致。
使用 rosdep 安装依赖项
ROS 2 软件包是在经常更新的 Ubuntu 系统上构建的。在安装新软件包之前,始终建议您确保您的系统是最新的。
sudo apt upgradesudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"注意:如果您使用的是基于 Ubuntu 的发行版(如 Linux Mint),但没有将自己标识为这样,您会收到像 Unsupported OS [mint] 这样的错误信息。在这种情况下,请在上述命令后附加 --os=ubuntu:noble 。
cxy@ubuntu2404-cxy:~/ros2_jazzy$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please runrosdep updatecxy@ubuntu2404-cxy:~/ros2_jazzy$ ^C
cxy@ubuntu2404-cxy:~/ros2_jazzy$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Skip end-of-life distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Add distro "iron"
Skip end-of-life distro "jade"
Add distro "jazzy"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Skip end-of-life distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/cxy/.ros/rosdep/sources.cache
…… 之后安装很多软件包
ERROR: the following rosdeps failed to installapt: Failed to detect successful installation of [libqt5core5a]apt: Failed to detect successful installation of [libqt5gui5]
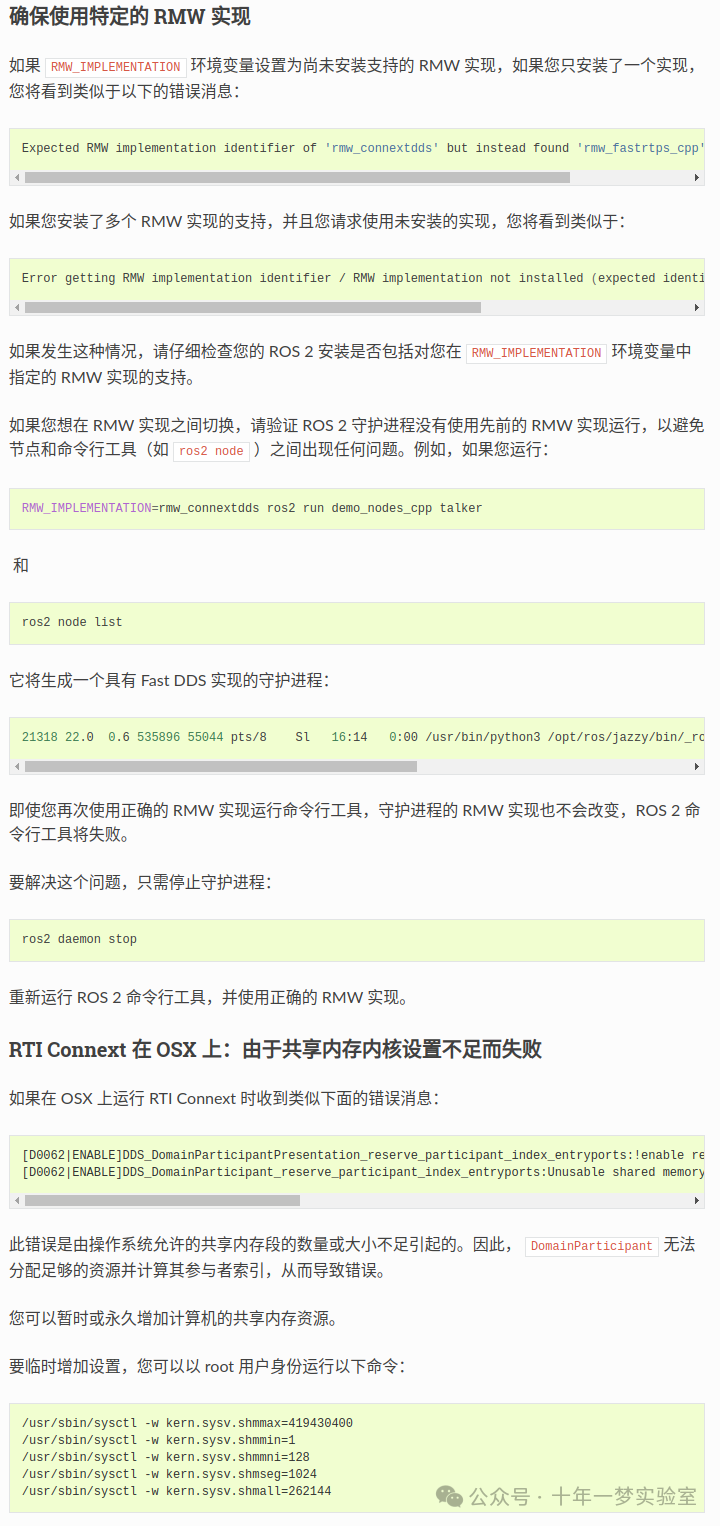
安装额外的 RMW 实现(可选)
ROS 2 使用的默认中间件是 Fast DDS ,但是中间件(RMW)可以在构建或运行时替换。请参阅如何使用多个 RMW 的指南。
RMW_IMPLEMENTATION=rmw_connextdds ros2 run demo_nodes_cpp talker# Run in another terminal
RMW_IMPLEMENTATION=rmw_connextdds ros2 run demo_nodes_py listener

在工作区构建代码
如果您已经通过其他方式安装了 ROS 2(无论是通过 Debians 还是二进制分发),请确保您在一个不包含那些其他安装源的新环境中运行以下命令。同时确保您的 .bashrc 中没有 source /opt/ros/${ROS_DISTRO}/setup.bash 。您可以通过命令 printenv | grep -i ROS 来确保 ROS 2 没有被源调用。输出应该为空。
关于如何使用 ROS 工作空间的更多信息,请参见本教程https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Colcon-Tutorial.html。
cd ~/ros2_jazzy/
colcon build --symlink-install
# 单独构建 colcon build --packages-select qt_gui_cpp

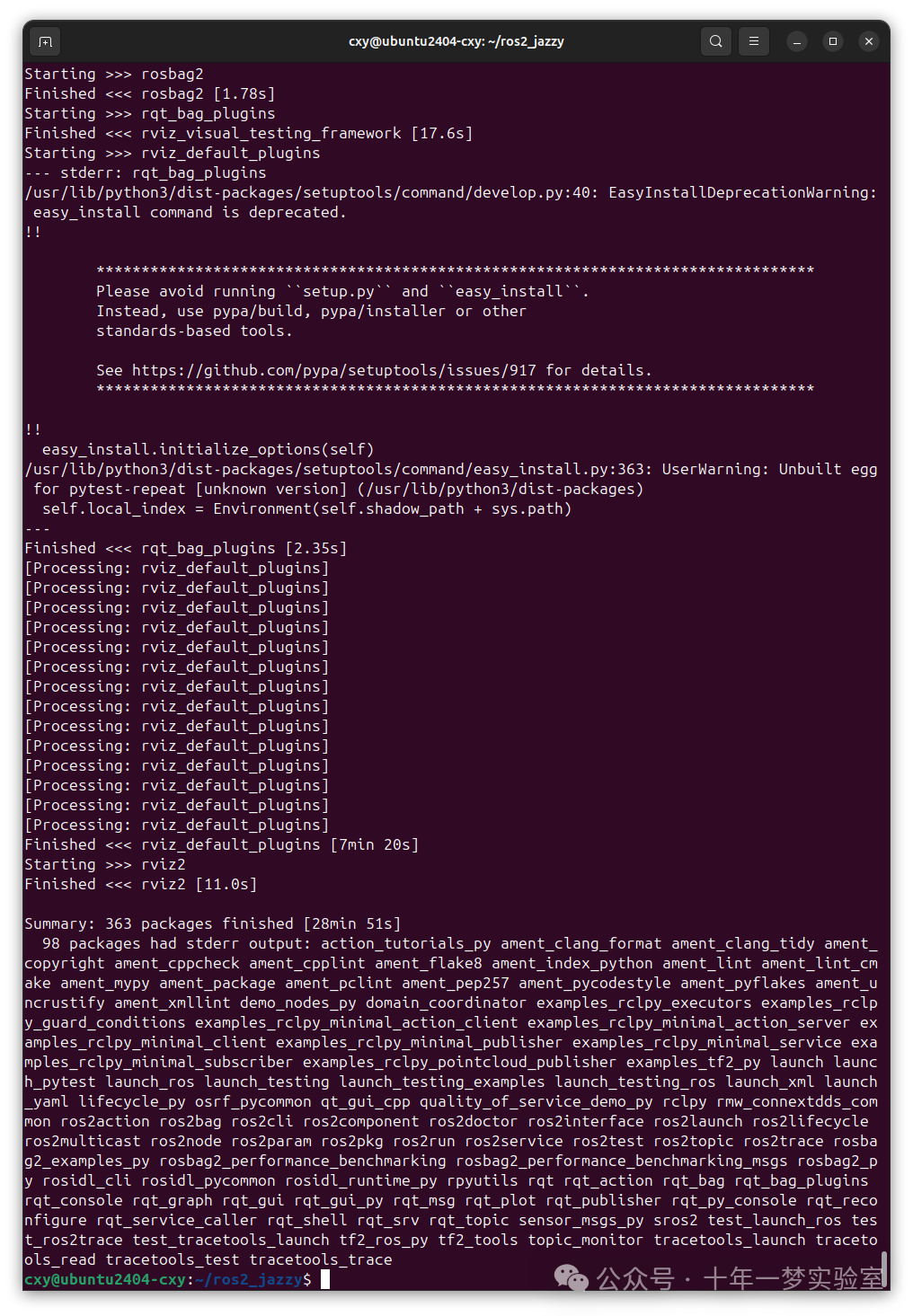
Summary: 363 packages finished [28min 51s]98 packages had stderr output: action_tutorials_py ament_clang_format ament_clang_tidy ament_copyright ament_cppcheck ament_cpplint ament_flake8 ament_index_python ament_lint ament_lint_cmake ament_mypy ament_package ament_pclint ament_pep257 ament_pycodestyle ament_pyflakes ament_uncrustify ament_xmllint demo_nodes_py domain_coordinator examples_rclpy_executors examples_rclpy_guard_conditions examples_rclpy_minimal_action_client examples_rclpy_minimal_action_server examples_rclpy_minimal_client examples_rclpy_minimal_publisher examples_rclpy_minimal_service examples_rclpy_minimal_subscriber examples_rclpy_pointcloud_publisher examples_tf2_py launch launch_pytest launch_ros launch_testing launch_testing_examples launch_testing_ros launch_xml launch_yaml lifecycle_py osrf_pycommon qt_gui_cpp quality_of_service_demo_py rclpy rmw_connextdds_common ros2action ros2bag ros2cli ros2component ros2doctor ros2interface ros2launch ros2lifecycle ros2multicast ros2node ros2param ros2pkg ros2run ros2service ros2test ros2topic ros2trace rosbag2_examples_py rosbag2_performance_benchmarking rosbag2_performance_benchmarking_msgs rosbag2_py rosidl_cli rosidl_pycommon rosidl_runtime_py rpyutils rqt rqt_action rqt_bag rqt_bag_plugins rqt_console rqt_graph rqt_gui rqt_gui_py rqt_msg rqt_plot rqt_publisher rqt_py_console rqt_reconfigure rqt_service_caller rqt_shell rqt_srv rqt_topic sensor_msgs_py sros2 test_launch_ros test_ros2trace test_tracetools_launch tf2_ros_py tf2_tools topic_monitor tracetools_launch tracetools_read tracetools_test tracetools_trace便条
如果您在编译所有示例时遇到问题,而这又阻碍了您成功构建,您可以使用 --packages-skip colcon 标志来忽略正在引起问题的包。例如,如果您不想安装庞大的 OpenCV 库,您可以使用以下命令跳过构建依赖它的包:
colcon build --symlink-install --packages-skip image_tools intra_process_demo建立环境
通过源文件设置您的环境。
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
. ~/ros2_jazzy/install/local_setup.bash尝试一些例子
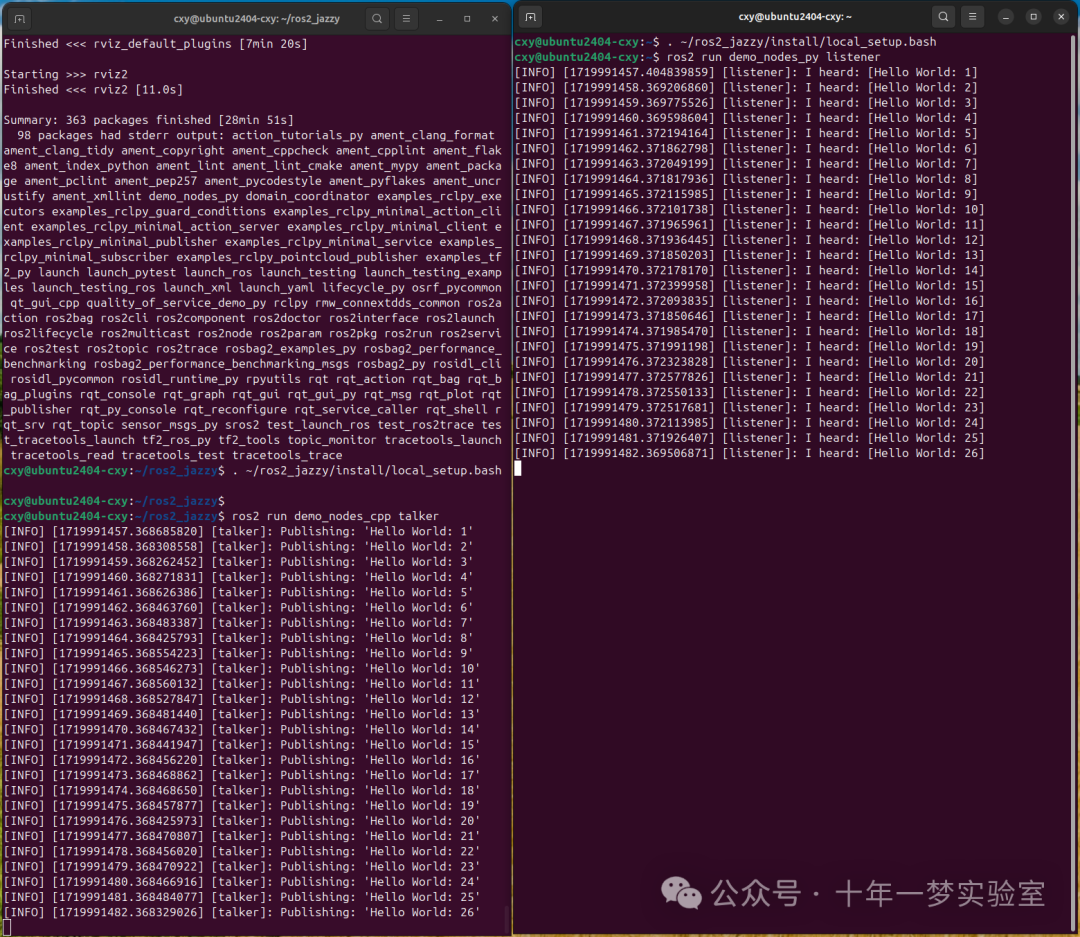
在一个终端中,源设置文件,然后运行一个 C++ talker :
. ~/ros2_jazzy/install/local_setup.bash
ros2 run demo_nodes_cpp talker在另一个终端中,源设置文件,然后运行一个 Python listener :
. ~/ros2_jazzy/install/local_setup.bash
ros2 run demo_nodes_py listener您应该看到 talker 显示它是 Publishing 消息, listener 显示 I heard 那些消息。这验证了 C++和 Python API 都正常工作。万岁!
下一步
继续进行教程和演示 https://docs.ros.org/en/jazzy/Tutorials.html ,配置您的环境,创建您自己的工作区和包,并学习 ROS 2 的核心概念。
备选编译器
使用除 gcc 之外的其他编译器来编译 ROS 2 很容易。如果您将环境变量 CC 和 CXX 分别设置为工作中的 C 和 C++编译器的可执行文件,并重新触发 CMake 配置(通过使用 --cmake-force-configure 或删除您希望受影响的包),CMake 将重新配置并使用不同的编译器。
Clang
配置 CMake 以检测和使用 Clang:
sudo apt install clang
export CC=clang
export CXX=clang++
colcon build --cmake-force-configure保持最新状态
请定期维护源代码检出,以刷新您的源安装https://docs.ros.org/en/jazzy/Installation/Maintaining-a-Source-Checkout.html 。

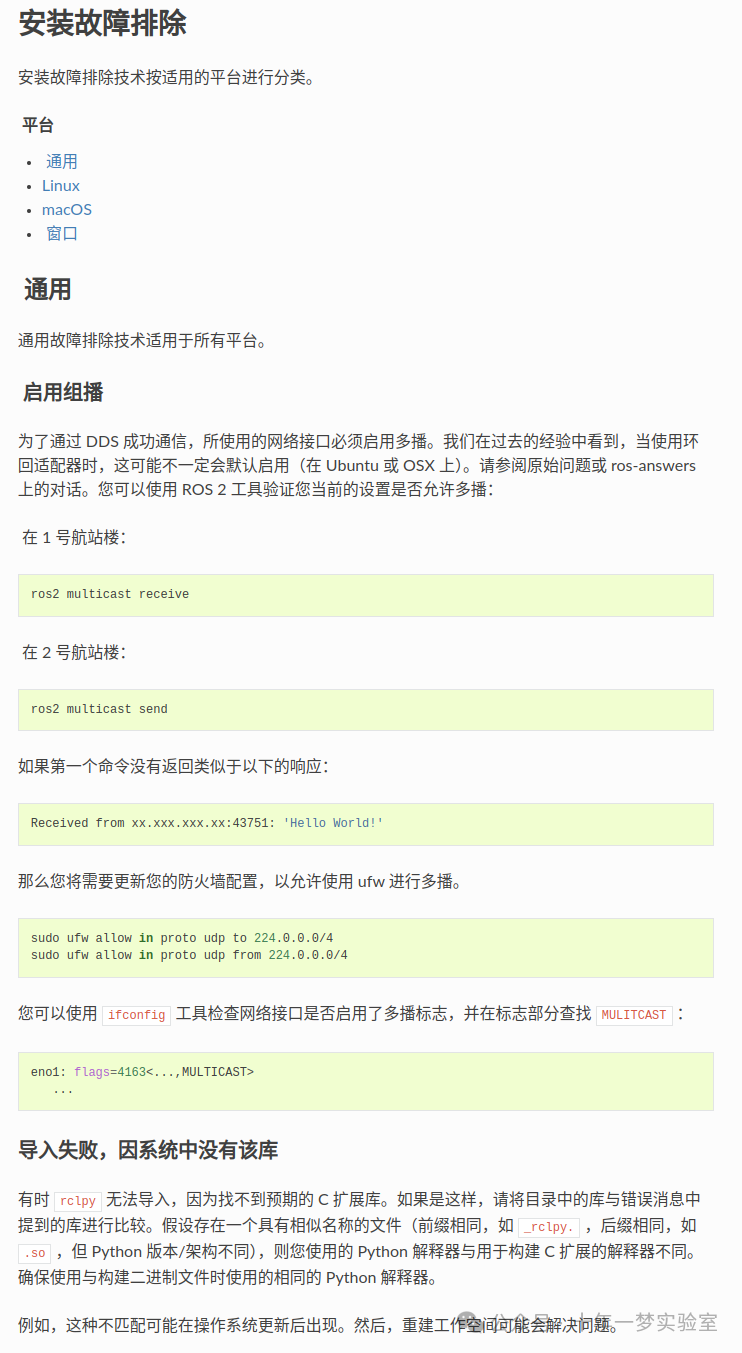
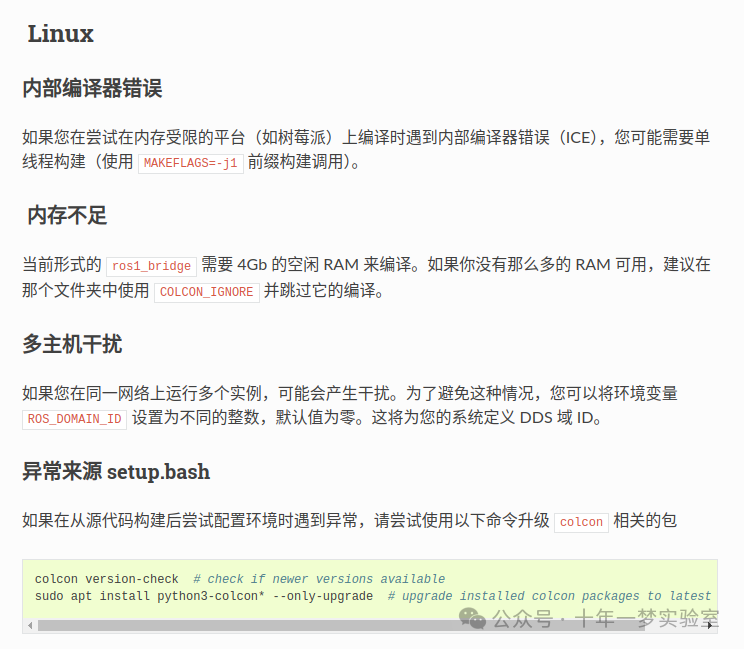
故障排除
故障排除技术可以在这里找到。https://docs.ros.org/en/jazzy/How-To-Guides/Installation-Troubleshooting.html#linux-troubleshooting
卸载
如果您按照上面的指示使用 colcon 安装了工作空间,那么“卸载”可能只是打开一个新终端而不引用工作空间的
setup文件的问题。这样,您的环境就会表现得好像系统上没有安装 Jazzy。如果您也在尝试释放空间,您可以通过以下方式删除整个工作区目录:
rm -rf ~/ros2_jazzy参考网址:
https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debians.html#
https://docs.ros.org/en/jazzy/Installation/Alternatives/Ubuntu-Development-Setup.html
https://docs.ros.org/en/jazzy/How-To-Guides/Working-with-multiple-RMW-implementations.html
https://docs.ros.org/en/jazzy/Tutorials.html











![代码随想录算法训练营第67天:图论5[1]](https://img-blog.csdnimg.cn/img_convert/0c0606e0653fcbecaba88b3d2a8863d5.png)


