参考
wiki 流网络 flow network 解释
相关文章
ipa 分区算法 ipa 分区算法总结,部分算法图解
环境
ubuntu20,ros 版本 noetic
运行测试
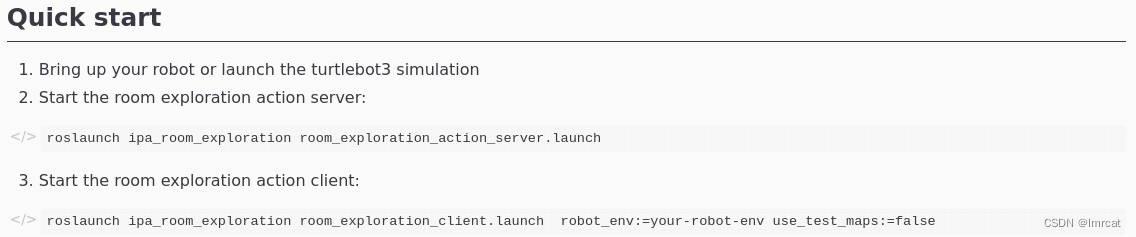
按照 readme 提示进行测试,跳过第一个步骤,并不需要 turtlebot3。
执行第三个 launch 报错:

看下 room_exploration_client.launch 文件
<?xml version="1.0"?>
<launch><arg name="env_pack" default="$(find cob_default_env_config)" /><arg name="robot_env" default="$(optenv ROBOT_ENV !!NO_ROBOT_ENV_SET!!)"/><arg name="robot_radius" default="0.5"/><arg name="coverage_radius" default="0.5"/><arg name="use_test_maps" default="true"/><!-- --><node ns="room_exploration" pkg="ipa_room_exploration" type="room_exploration_client" name="room_exploration_client" output="screen"><rosparam file="$(arg env_pack)/envs/$(arg robot_env)/map.yaml" command="load" /><param name="env_pack" value="$(arg env_pack)"/><param name="robot_env" value="$(arg robot_env)"/><param name="robot_radius" value="$(arg robot_radius)"/><param name="coverage_radius" value="$(arg coverage_radius)"/><param name="use_test_maps" value="$(arg use_test_maps)"/></node></launch>env_pack:ipa 的配置功能包,实践中将程序和系统配置分离,相关功能配置可能是在项目中专门配置功能包中。
robot_env:机器环境,在 env_pack 包中,对多个机器(差速轮底盘,阿克曼底盘等)有多个不同的配置,需要根据机器分别配置参数。
robot_radius:???作用
coverage_radius:机器的覆盖半径。
use_test_maps:是否用 ipa 官方的测试地图。
默认的配置功能包是 cob_default_env_config ,我们自己的项目中不存在这个功能包,所以要创建一个新功能包来完成 ipa 配置功能包即可。
在 ipa_coverage_planning 文件包内创建 ipa_env 功能包,用 tree 查看目录如下
➜ ipa_coverage_planning git:(develop) ✗ tree -L 1
.
├── ipa_building_msgs
├── ipa_building_navigation
├── ipa_coverage_planning
├── ipa_env
├── ipa_room_exploration
├── ipa_room_segmentation
└── README.mdipa_env 包目录如下:

第 3 个 launch 指令执行需要修改 env_pack 参数值,如下:
roslaunch ipa_room_exploration room_exploration_client.launch env_pack:=ipa_env robot_env:=ipa_robot use_test_maps:=false执行后依旧报错:

把 room_exploration_client.launch 的 env_pack 默认值修改为存在的其他功能包名,如下:
<arg name="env_pack" default="$(find ipa_room_exploration)" />执行后没有“not found cob_default_env_config” 的错误了。
!!!注意!!!
这里说明 xml 中标签 <arg> 的默认值执行是在终端赋值之前的执行的!
但有了其他问题,rosparam 找不到 map.yaml 文件:

在 map.yaml 文件目录下执行 pwd 查看路径:

路径是正确的。
仔细看看 xml,发现 file 是用 $(arg env_pack) 拼接的,说明变量 env_pack 需要包含 ipa 配置功能包在系统中的绝对路径,而我们的传参仅仅传递了 ipa 配置功能包名。
修改 launch 如下,让 file 自动寻找 env_pack 功能包在系统的绝对路径,下面只显示修改的部分:
<arg name="env_pack" default="ipa_room_exploration" /><node ns="room_exploration" pkg="ipa_room_exploration" type="room_exploration_client" name="room_exploration_client" output="screen"><rosparam file="$(find $(arg env_pack))/envs/$(arg robot_env)/map.yaml" command="load" /><param name="env_pack" value="$(find env_pack)"/></node>再执行 launch,map.yaml 文件已经可以找到了,但出现新问题,xml 中 $() 不让嵌套使用,报语法错误。゚(TヮT)゚。

最后还是改成下面这样:
<?xml version="1.0"?>
<launch><arg name="env_pack" default="$(find ipa_env)" /><arg name="robot_env" default="$(optenv ROBOT_ENV !!NO_ROBOT_ENV_SET!!)"/><arg name="robot_radius" default="0.5"/><arg name="coverage_radius" default="0.5"/><arg name="use_test_maps" default="true"/><!-- --><node ns="room_exploration" pkg="ipa_room_exploration" type="room_exploration_client" name="room_exploration_client" output="screen"><rosparam file="$(arg env_pack)/envs/$(arg robot_env)/map.yaml" command="load" /><param name="env_pack" value="$(arg env_pack)"/><param name="robot_env" value="$(arg robot_env)"/><param name="robot_radius" value="$(arg robot_radius)"/><param name="coverage_radius" value="$(arg coverage_radius)"/><param name="use_test_maps" value="$(arg use_test_maps)"/></node></launch>执行 launch 也不需要修改 env_pack 变量值了:
roslaunch ipa_room_exploration room_exploration_client.launch robot_env:=ipa_robot use_test_maps:=false程序运行成功!

覆盖算法测试
ipa_room_exploration/ros/launch/room_exploration_action_server_params.yaml 文件中的 room_exploration_algorithm 参数来选择覆盖算法。重启 ipa 服务端,重新加载参数,执行
roslaunch ipa_room_exploration room_exploration_action_server.launch执行后发现覆盖路径无明显变化。
服务端 log 如下:
log 显示启动 server.launch 后,覆盖算法已经修改为 6 局部能量最小覆盖算法。

注意这里的 room_exploration/path_planning_algorithm 的 room_exploration 并非参数空间前缀,而是代码这么写的。一开始还被误导以为是参数空间名对不上导致的问题。

之后再启动 client.launch,触发了动态参数服务器,将覆盖算法改为了 8,牛耕算法变种。

在 ipa_room_exploration/ros/src/room_exploration_action_client.cpp 的 121 行发现这段代码,这里创建了动态参数服务器的客户端,修改了参数:

屏蔽这段代码,编译 ipa_room_exploration 功能包,重新执行服务器 launch 和客户端 launch。
成功执行了局部能量最小覆盖算法!
下面展示所有的覆盖算法路径效果,这里的测试仅修改了 room_exploration_algorithm 服务器参数,其他参数是官方默认参数。
-
room_exploration_algorithm 参数值之 grid point explorator
对应论文的 Grid-based Traveling Salesman Coverage Path Planning 基于栅格旅行商覆盖路径算法,用 TSP 旅行商算法来计算地图中所有空闲栅格的遍历顺序。
该算法十分耗时,作者甚至给它做了个进度条,用一张 gif 来感受一下有多慢:


-
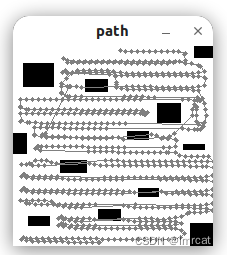
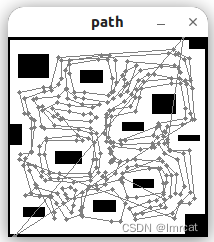
room_exploration_algorithm 参数值之 boustrophedon explorator
对应论文的 Boustrophedon Coverage Path Planning 牛耕覆盖路径算法

-
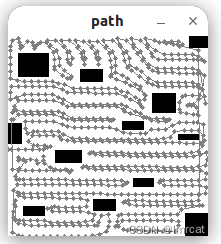
room_exploration_algorithm 参数值之 neural network explorator
神经网络覆盖算法

-
room_exploration_algorithm 参数值之 convexSPP explorator
Convex Sensor Placement Coverage Path Planning 凸传感器放置覆盖路径算法
Log 有点多 ...


-
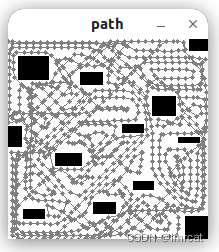
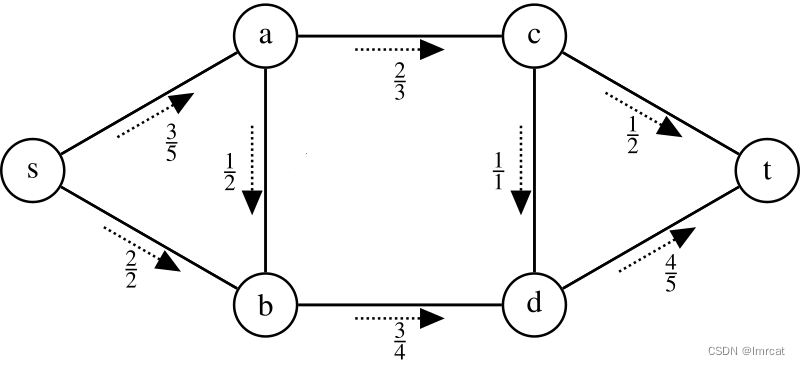
room_exploration_algorithm 参数值之 flowNetwork explorator
论文参考文献和源码中都找不到相关论文。注释有这么一句:
This class provides a coverage path planning algorithm based on a flow network.
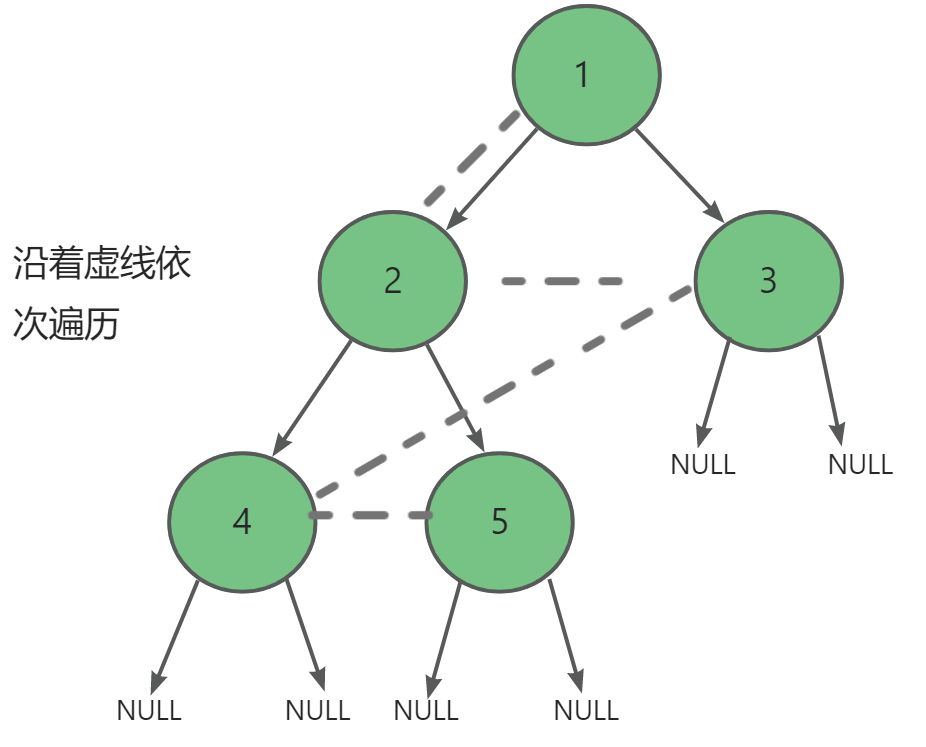
Wiki 对流网络 flow network 的解释如下(有些资料叫 network flow 网络流):
在图论中,流网络是一个有向图,每条边都有一个容量,每条边接收一个流。边的流量不能超过边的容量。在运筹学 operations research 中,有向图通常称为网络,顶点称为节点,边称为弧。流必须满足流入节点的流量等于流出节点的流量的限制,除非它是只有流出的源 S,或者只有流入的汇 t。
Log 刷屏非常多,似乎在第三方库中,源码搜索不到相关日志。程序陷入死循环一直没有结束,该算法应该未完成。
-
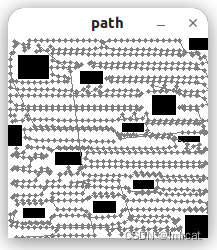
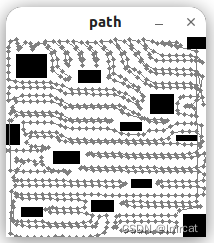
room_exploration_algorithm 参数值之 energyFunctional explorator
对应论文 Grid-based Local Energy Minimization 基于栅格的局部能量最小算法

-
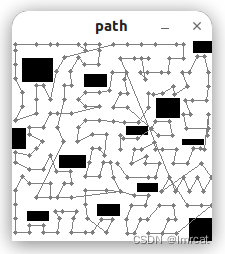
room_exploration_algorithm 参数值之 voronoi explorator
对应论文 Contour Line-based Coverage Path Planning 基于轮廓线的覆盖路径算法
执行后没有规划成功,服务端 log:

把服务器参数 revisit_areas 设置为 true,再次测试...还是规划失败。

客户端 log:

没有其他 log 提示了,初步判断是地图没有封闭空间导致的,给地图增加一圈黑边(障碍物)再测试。
规划成功!说明用 voronoi explorator 算法需要地图有封闭边界!


-
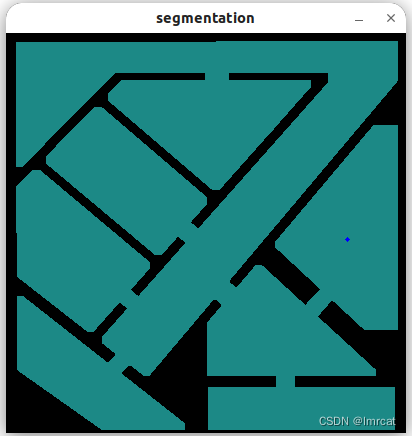
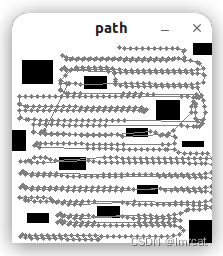
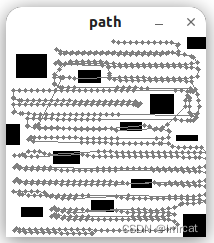
room_exploration_algorithm 参数值之 boustrophedon variant explorator
牛耕法变种,改进了牛耕法中细胞分解后,对相同主轴的分区进行合并,减少区域的碎片化。没找到对应的论文信息。

分区算法测试
分区算法在 ipa_room_segmentation 功能包中,也是分为客户端和服务端两部分运行:
服务端 room_segmentation_action_server.launch 和客户端 room_segmentation_action_client.launch
分区算法的参数配置在 ipa_room_segmentation/ros/launch/room_segmentation_action_server_params.yaml 中。
同样,客户端代码也修改了动态参数服务器的参数,先屏蔽了 ipa_room_segmentation/ros/src/room_segmentation_client.cpp 的部分代码:

编译后分别运行服务端和客户端的 launch。
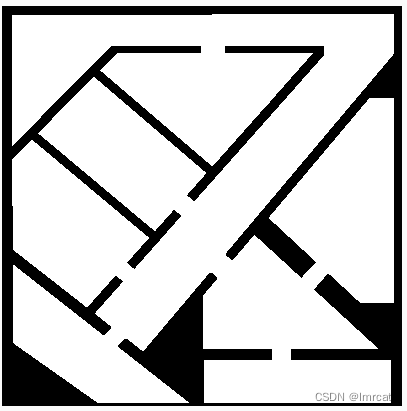
测试的地图不对,测试的还是官方的测试地图:
而我的地图是:

从 log 看参数配置的生效了。再看看分区客户端代码是怎么写的...
客户端是直接把测试地图名写入一个 vector 变量 map_names 中,然后在 for 循环中在指定地址获取相应的地图地址,把地图转为地图话题数据,再装入 goal 中发送给服务端。
流程大概如下:
int main(int argc, char **argv)
{ros::init(argc, argv, "room_segmentation_client");ros::NodeHandle nh;// map namesstd::vector< std::string > map_names;map_names.push_back("lab_ipa"); // 这就是测试的第一张默认地图map_names.push_back("lab_c_scan");... // 加了很多地图for (size_t image_index = 0; image_index<map_names.size(); ++image_index) {// 在 ipa_room_segmentation 功能包的指定位置搜索地图std::string image_filename = ros::package::getPath("ipa_room_segmentation") + "/common/files/test_maps/" + map_names[image_index] + ".png";cv::Mat map = cv::imread(image_filename.c_str(), 0); // cv 读地图...cv_image.toImageMsg(labeling); // 数据转换actionlib::SimpleActionClient<ipa_building_msgs::MapSegmentationAction> ac("room_segmentation_server", true);... // goal 数据装包ac.sendGoal(goal); // 目标发送到服务端bool finished_before_timeout = ac.waitForResult(ros::Duration()); // 等待结果if (finished_before_timeout) {... // 数据转换到 cv 格式cv::imshow("segmentation", colour_segmented_map); // cv 显示地图cv::waitKey(); // 敲空格测试下一张地图}} // forreturn 0;
}所以只需要修改客户端的测试地图名称和测试地图所在的路径即可。
根据自己的测试环境修改这两部分代码,编译后测试 ok。
下面展示所有的分割算法分区效果,这里的测试仅修改了 room_segmentation_algorithm 服务器参数,其他参数是官方默认参数。
-
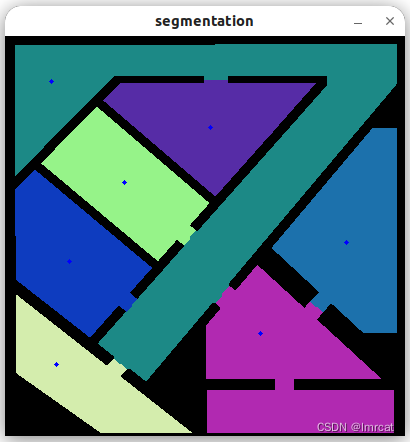
room_segmentation_algorithm 参数值之 morphological segmentation
对应论文的 Morphological Segmentation 形态分割算法

-
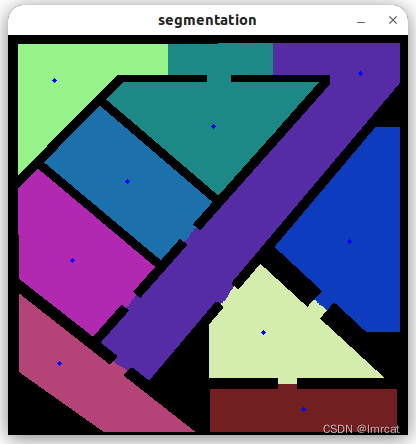
room_segmentation_algorithm 参数值之 distance segmentation
对应论文 Distance Transform-based Segmentation 距离变换分割算法

-
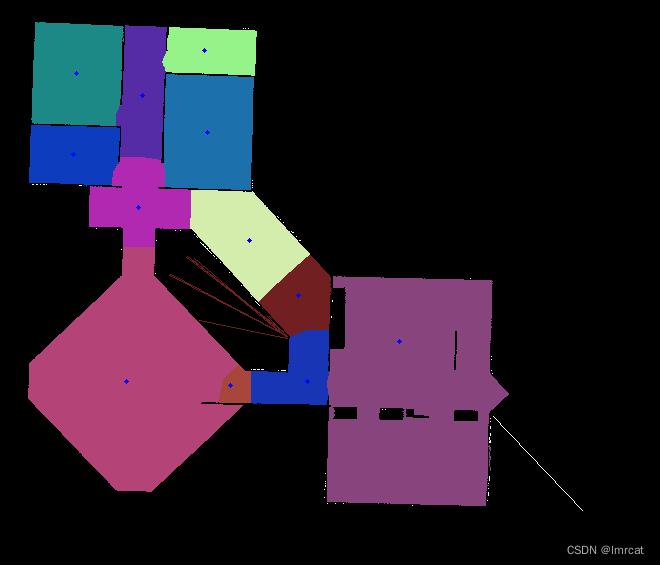
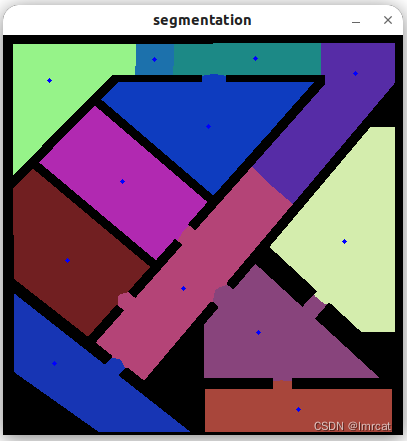
room_segmentation_algorithm 参数值之 Voronoi segmentation
对应论文 Voronoi Graph-based Segmentation Voronoi 图分割算法

-
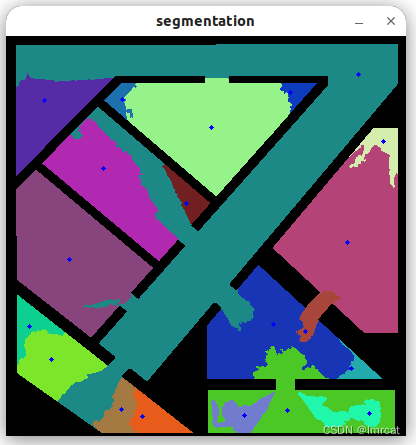
room_segmentation_algorithm 参数值之 semantic segmentation
在《Room Segmentation: Survey, Implementation, and Analysis.》称为Feature-based Segmentation 特征/语义分割

-
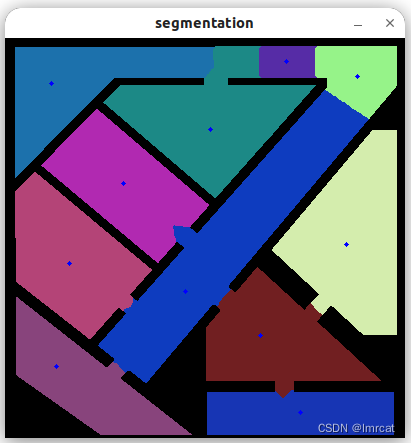
room_segmentation_algorithm 参数值之 voronoi random field segmentation
对应论文 Voronoi Random Fields Segmentation Voronoi 随机势场分割
-
room_segmentation_algorithm 参数值之 passthrough segmentation
不分割算法,正如其名...