秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有110+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进——点击即可跳转
本文给大家带来的教程是将YOLOv8的backbone替换为Swin-Transformer结构来提取特征。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
专栏地址:YOLOv8改进——更新各种有效涨点方法——点击即可跳转
目录
1.原理
2. 将Swin-Transformer添加到yolov8网络中
2.1 Swin-Transformer代码实现
2.2 Swin-Transformer的神经网络模块代码解析
2.3 更改init.py文件
2.4 添加yaml文件
2.5 注册模块
2.6 执行程序
3. 完整代码分享
4. GFLOPs
5. 进阶
6. 总结
1.原理

论文地址:Swin-Transformer点击即可跳转
官方代码:Swin-Transformer官方代码仓库点击即可跳转
Swin-Transformer是MRA的作品,而MRA撑起了深度学习的半边天。
Swin-Transformer是2021年微软研究院发表在ICCV上的一篇文章,并且已经获得ICCV 2021 best paper 的荣誉称号。Swin Transformer网络是Transformer模型在视觉领域的又一次碰撞。该论文一经发表就已在多项视觉任务中霸榜。
Swin Transformer使用了类似卷积神经网络中的层次化构建方法(Hierarchical feature maps),比如特征图尺寸中有对图像下采样4倍的,8倍的以及16倍的,这样的backbone有助于在此基础上构建目标检测,实例分割等任务。而在之前的Vision Transformer中是一开始就直接下采样16倍,后面的特征图也是维持这个下采样率不变。
在Swin Transformer中使用了Windows Multi-Head Self-Attention(W-MSA)的概念,比如在下图的4倍下采样和8倍下采样中,将特征图划分成了多个不相交的区域(Window),并且Multi-Head Self-Attention只在每个窗口(Window)内进行。相对于Vision Transformer中直接对整个特征图进行Multi-Head Self-Attention,这样做的目的是能够减少计算量的,尤其是在浅层特征图很大的时候。这样做虽然减少了计算量但也会隔绝不同窗口之间的信息传递,所以在论文中作者又提出了 Shifted Windows Multi-Head Self-Attention(SW-MSA)的概念,通过此方法能够让信息在相邻的窗口中进行传递。

因此,Swin-Transformer在计算效率上相对于传统的 Transformer 架构具有优势。Swin Transformer 是一种高效且性能优越的深度学习模型,适用于图像分类、目标检测等视觉任务,并且在处理大规模图像数据时表现出色。
2. 将Swin-Transformer添加到yolov8网络中
2.1 Swin-Transformer代码实现
关键步骤一: 将下面代码粘贴到在/ultralytics/ultralytics/nn/modules/block.py中,并在该文件的__all__中添加“Swin-Transformer”
#swin transformer
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.checkpoint as checkpoint
import numpy as np
from typing import Optionaldef drop_path_f(x, drop_prob: float = 0., training: bool = False):if drop_prob == 0. or not training:return xkeep_prob = 1 - drop_probshape = (x.shape[0],) + (1,) * (x.ndim - 1)random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)random_tensor.floor_()output = x.div(keep_prob) * random_tensorreturn outputclass DropPath(nn.Module):def __init__(self, drop_prob=None):super(DropPath, self).__init__()self.drop_prob = drop_probdef forward(self, x):return drop_path_f(x, self.drop_prob, self.training)def window_partition(x, window_size: int):B, H, W, C = x.shapex = x.view(B, H // window_size, window_size, W // window_size, window_size, C)# permute: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H//Mh, W//Mh, Mw, Mw, C]# view: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B*num_windows, Mh, Mw, C]windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)return windowsdef window_reverse(windows, window_size: int, H: int, W: int):B = int(windows.shape[0] / (H * W / window_size / window_size))# view: [B*num_windows, Mh, Mw, C] -> [B, H//Mh, W//Mw, Mh, Mw, C]x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)# permute: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B, H//Mh, Mh, W//Mw, Mw, C]# view: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H, W, C]x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)return xclass Mlp(nn.Module):def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.drop1 = nn.Dropout(drop)self.fc2 = nn.Linear(hidden_features, out_features)self.drop2 = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop1(x)x = self.fc2(x)x = self.drop2(x)return xclass WindowAttention(nn.Module):r""" Window based multi-head self attention (W-MSA) module with relative position bias.It supports both of shifted and non-shifted window.Args:dim (int): Number of input channels.window_size (tuple[int]): The height and width of the window.num_heads (int): Number of attention heads.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueattn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0proj_drop (float, optional): Dropout ratio of output. Default: 0.0"""def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # [Mh, Mw]self.num_heads = num_headshead_dim = dim // num_headsself.scale = head_dim ** -0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # [2*Mh-1 * 2*Mw-1, nH]# get pair-wise relative position index for each token inside the windowcoords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing="ij")) # [2, Mh, Mw]coords_flatten = torch.flatten(coords, 1) # [2, Mh*Mw]# [2, Mh*Mw, 1] - [2, 1, Mh*Mw]relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # [2, Mh*Mw, Mh*Mw]relative_coords = relative_coords.permute(1, 2, 0).contiguous() # [Mh*Mw, Mh*Mw, 2]relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # [Mh*Mw, Mh*Mw]self.register_buffer("relative_position_index", relative_position_index)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)nn.init.trunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, mask: Optional[torch.Tensor] = None):"""Args:x: input features with shape of (num_windows*B, Mh*Mw, C)mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None"""# [batch_size*num_windows, Mh*Mw, total_embed_dim]B_, N, C = x.shape# qkv(): -> [batch_size*num_windows, Mh*Mw, 3 * total_embed_dim]# reshape: -> [batch_size*num_windows, Mh*Mw, 3, num_heads, embed_dim_per_head]# permute: -> [3, batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4).contiguous()# [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]q, k, v = qkv.unbind(0) # make torchscript happy (cannot use tensor as tuple)# transpose: -> [batch_size*num_windows, num_heads, embed_dim_per_head, Mh*Mw]# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, Mh*Mw]q = q * self.scaleattn = (q @ k.transpose(-2, -1))# relative_position_bias_table.view: [Mh*Mw*Mh*Mw,nH] -> [Mh*Mw,Mh*Mw,nH]relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # [nH, Mh*Mw, Mh*Mw]attn = attn + relative_position_bias.unsqueeze(0)if mask is not None:# mask: [nW, Mh*Mw, Mh*Mw]nW = mask.shape[0] # num_windows# attn.view: [batch_size, num_windows, num_heads, Mh*Mw, Mh*Mw]# mask.unsqueeze: [1, nW, 1, Mh*Mw, Mh*Mw]attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, N, N)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]# transpose: -> [batch_size*num_windows, Mh*Mw, num_heads, embed_dim_per_head]# reshape: -> [batch_size*num_windows, Mh*Mw, total_embed_dim]#x = (attn @ v).transpose(1, 2).reshape(B_, N, C)x = (attn.to(v.dtype) @ v).transpose(1, 2).reshape(B_, N, C)x = self.proj(x)x = self.proj_drop(x)return xclass SwinTransformerBlock(nn.Module):r""" Swin Transformer Block.Args:dim (int): Number of input channels.num_heads (int): Number of attention heads.window_size (int): Window size.shift_size (int): Shift size for SW-MSA.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Truedrop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float, optional): Stochastic depth rate. Default: 0.0act_layer (nn.Module, optional): Activation layer. Default: nn.GELUnorm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, dim, num_heads, window_size=7, shift_size=0,mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,act_layer=nn.GELU, norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratioassert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim, window_size=(self.window_size, self.window_size), num_heads=num_heads, qkv_bias=qkv_bias,attn_drop=attn_drop, proj_drop=drop)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)def forward(self, x, attn_mask):H, W = self.H, self.WB, L, C = x.shapeassert L == H * W, "input feature has wrong size"shortcut = xx = self.norm1(x)x = x.view(B, H, W, C)# pad feature maps to multiples of window size# 把 feature map 给 pad 到 window size 的整数倍pad_l = pad_t = 0pad_r = (self.window_size - W % self.window_size) % self.window_sizepad_b = (self.window_size - H % self.window_size) % self.window_sizex = F.pad(x, (0, 0, pad_l, pad_r, pad_t, pad_b))_, Hp, Wp, _ = x.shape# cyclic shiftif self.shift_size > 0:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))else:shifted_x = xattn_mask = None# partition windowsx_windows = window_partition(shifted_x, self.window_size) # [nW*B, Mh, Mw, C]x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # [nW*B, Mh*Mw, C]# W-MSA/SW-MSAattn_windows = self.attn(x_windows, mask=attn_mask) # [nW*B, Mh*Mw, C]# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, C) # [nW*B, Mh, Mw, C]shifted_x = window_reverse(attn_windows, self.window_size, Hp, Wp) # [B, H', W', C]# reverse cyclic shiftif self.shift_size > 0:x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:x = shifted_xif pad_r > 0 or pad_b > 0:# 把前面pad的数据移除掉x = x[:, :H, :W, :].contiguous()x = x.view(B, H * W, C)# FFNx = shortcut + self.drop_path(x)x = x + self.drop_path(self.mlp(self.norm2(x)))return xclass SwinStage(nn.Module):"""A basic Swin Transformer layer for one stage.Args:dim (int): Number of input channels.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Truedrop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False."""def __init__(self, dim, c2, depth, num_heads, window_size,mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0.,drop_path=0., norm_layer=nn.LayerNorm, use_checkpoint=False):super().__init__()assert dim == c2, r"no. in/out channel should be same"self.dim = dimself.depth = depthself.window_size = window_sizeself.use_checkpoint = use_checkpointself.shift_size = window_size // 2# build blocksself.blocks = nn.ModuleList([SwinTransformerBlock(dim=dim,num_heads=num_heads,window_size=window_size,shift_size=0 if (i % 2 == 0) else self.shift_size,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias,drop=drop,attn_drop=attn_drop,drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer)for i in range(depth)])def create_mask(self, x, H, W):# calculate attention mask for SW-MSAHp = int(np.ceil(H / self.window_size)) * self.window_sizeWp = int(np.ceil(W / self.window_size)) * self.window_sizeimg_mask = torch.zeros((1, Hp, Wp, 1), device=x.device) # [1, Hp, Wp, 1]h_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # [nW, Mh, Mw, 1]mask_windows = mask_windows.view(-1, self.window_size * self.window_size) # [nW, Mh*Mw]attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, 1, Mh*Mw] - [nW, Mh*Mw, 1]# [nW, Mh*Mw, Mh*Mw]attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))return attn_maskdef forward(self, x):B, C, H, W = x.shapex = x.permute(0, 2, 3, 1).contiguous().view(B, H * W, C)attn_mask = self.create_mask(x, H, W) # [nW, Mh*Mw, Mh*Mw]for blk in self.blocks:blk.H, blk.W = H, Wif not torch.jit.is_scripting() and self.use_checkpoint:x = checkpoint.checkpoint(blk, x, attn_mask)else:x = blk(x, attn_mask)x = x.view(B, H, W, C)x = x.permute(0, 3, 1, 2).contiguous()return xclass PatchEmbed(nn.Module):def __init__(self, in_c=3, embed_dim=96, patch_size=4, norm_layer=None):super().__init__()patch_size = (patch_size, patch_size)self.patch_size = patch_sizeself.in_chans = in_cself.embed_dim = embed_dimself.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()def forward(self, x):_, _, H, W = x.shape# paddingpad_input = (H % self.patch_size[0] != 0) or (W % self.patch_size[1] != 0)if pad_input:# to pad the last 3 dimensions,# (W_left, W_right, H_top,H_bottom, C_front, C_back)x = F.pad(x, (0, self.patch_size[1] - W % self.patch_size[1],0, self.patch_size[0] - H % self.patch_size[0],0, 0))x = self.proj(x)B, C, H, W = x.shape# flatten: [B, C, H, W] -> [B, C, HW]# transpose: [B, C, HW] -> [B, HW, C]x = x.flatten(2).transpose(1, 2)x = self.norm(x)# view: [B, HW, C] -> [B, H, W, C]# permute: [B, H, W, C] -> [B, C, H, W]x = x.view(B, H, W, C)x = x.permute(0, 3, 1, 2).contiguous()return xclass PatchMerging(nn.Module):r""" Patch Merging Layer.Args:dim (int): Number of input channels.norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, dim, c2, norm_layer=nn.LayerNorm):super().__init__()assert c2 == (2 * dim), r"no. out channel should be 2 * no. in channel "self.dim = dimself.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)self.norm = norm_layer(4 * dim)def forward(self, x):"""x: B, C, H, W"""B, C, H, W = x.shape# assert L == H * W, "input feature has wrong size"x = x.permute(0, 2, 3, 1).contiguous()# x = x.view(B, H*W, C)# paddingpad_input = (H % 2 == 1) or (W % 2 == 1)if pad_input:# to pad the last 3 dimensions, starting from the last dimension and moving forward.# (C_front, C_back, W_left, W_right, H_top, H_bottom)x = F.pad(x, (0, 0, 0, W % 2, 0, H % 2))x0 = x[:, 0::2, 0::2, :] # [B, H/2, W/2, C]x1 = x[:, 1::2, 0::2, :] # [B, H/2, W/2, C]x2 = x[:, 0::2, 1::2, :] # [B, H/2, W/2, C]x3 = x[:, 1::2, 1::2, :] # [B, H/2, W/2, C]x = torch.cat([x0, x1, x2, x3], -1) # [B, H/2, W/2, 4*C]x = x.view(B, -1, 4 * C) # [B, H/2*W/2, 4*C]x = self.norm(x)x = self.reduction(x) # [B, H/2*W/2, 2*C]x = x.view(B, int(H / 2), int(W / 2), C * 2)x = x.permute(0, 3, 1, 2).contiguous()return x2.2 Swin-Transformer的神经网络模块代码解析
-
DropPath:实现随机深度正则化的类,这是一种在训练期间随机丢弃一些残差分支以提高模型泛化能力的技术。
-
WindowAttention:实现具有相对位置偏差的基于窗口的多头自注意力 (W-MSA),它处理输入图像的小窗口以有效捕获局部依赖关系。
-
SwinTransformerBlock:一个 Swin Transformer 块,包括基于窗口的多头自注意力和具有 GELU 激活的前馈网络 (FFN)。它支持移位窗口以提高模型捕获跨窗口连接的能力。
-
SwinStage:Swin Transformer 的一个阶段,由多个 Swin Transformer 块组成。它包括处理循环移位、窗口分区和注意力应用的逻辑。
-
PatchEmbed:将输入图像转换为补丁,然后将其线性投影到更高维的嵌入空间,本质上是为转换器层准备输入。
-
PatchMerging:合并相邻补丁以减少空间维度,这有助于逐步降低特征采样率。
主要特点:
-
窗口分区和反转函数允许在非重叠窗口中处理输入,与标准自注意力相比,这降低了计算复杂度。
-
相对位置编码可在不需要固定位置网格的情况下将空间信息添加到注意力机制中。
-
移位窗口机制允许跨窗口连接并增强模型捕获远程依赖关系的能力。
-
补丁嵌入和合并转换输入图像并逐步降低空间分辨率,使其对于大输入更有效率。
2.3 更改init.py文件
关键步骤二:修改modules文件夹下的__init__.py文件,先导入函数

然后在下面的__all__中声明函数

2.4 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/v8下面新建文件yolov8_Swin-Transformer.yaml文件,粘贴下面的内容
- OD【目标检测】
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, PatchEmbed, [96, 4]] # 0 [b, 96, 160, 160]- [-1, 1, SwinStage , [96, 2, 3, 7]] # 1 [b, 96, 160, 160]- [-1, 1, PatchMerging, [192]] # 2 [b, 192, 80, 80]- [-1, 1, SwinStage, [192, 2, 6, 7]] # 3 --F0-- [b, 192, 80, 80] p3- [-1, 1, PatchMerging, [384]] # 4 [b, 384, 40, 40]- [-1, 1, SwinStage, [384, 6, 12, 7]] # 5 --F1-- [b, 384, 40, 40] p4- [-1, 1, PatchMerging, [768]] # 6 [b, 768, 20, 20]- [-1, 1, SwinStage, [768, 2, 24, 7]] # 7 --F2-- [b, 768, 20, 20]- [-1, 1, SPPF, [768, 5]]# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 5], 1, Concat, [1]] # cat backbone P4- [-1, 1, C2f, [512]] # 11- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 3], 1, Concat, [1]] # cat backbone P3- [-1, 1, C2f, [256]] # 14 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 11], 1, Concat, [1]] # cat head P4- [-1, 1, C2f, [512]] # 17 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 8], 1, Concat, [1]] # cat head P5- [-1, 1, C2f, [1024]] # 20 (P5/32-large)- [[14, 17, 20], 1, Detect, [nc]] # Detect(P3, P4, P5)- Seg【语义分割】
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, PatchEmbed, [96, 4]] # 0 [b, 96, 160, 160]- [-1, 1, SwinStage , [96, 2, 3, 7]] # 1 [b, 96, 160, 160]- [-1, 1, PatchMerging, [192]] # 2 [b, 192, 80, 80]- [-1, 1, SwinStage, [192, 2, 6, 7]] # 3 --F0-- [b, 192, 80, 80] p3- [-1, 1, PatchMerging, [384]] # 4 [b, 384, 40, 40]- [-1, 1, SwinStage, [384, 6, 12, 7]] # 5 --F1-- [b, 384, 40, 40] p4- [-1, 1, PatchMerging, [768]] # 6 [b, 768, 20, 20]- [-1, 1, SwinStage, [768, 2, 24, 7]] # 7 --F2-- [b, 768, 20, 20]- [-1, 1, SPPF, [768, 5]]# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 5], 1, Concat, [1]] # cat backbone P4- [-1, 1, C2f, [512]] # 11- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 3], 1, Concat, [1]] # cat backbone P3- [-1, 1, C2f, [256]] # 14 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 11], 1, Concat, [1]] # cat head P4- [-1, 1, C2f, [512]] # 17 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 8], 1, Concat, [1]] # cat head P5- [-1, 1, C2f, [1024]] # 20 (P5/32-large)- [[14, 17, 20], 1, Segment, [nc, 32, 256]] # Segment(P3, P4, P5)温馨提示:因为本文只是对yolov8基础上添加模块,如果要对yolov8n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple。不明白的同学可以看这篇文章: yolov8yaml文件解读——点击即可跳转
# YOLOv8n
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
max_channels: 1024 # max_channels# YOLOv8s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
max_channels: 1024 # max_channels# YOLOv8l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
max_channels: 512 # max_channels# YOLOv8m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
max_channels: 768 # max_channels# YOLOv8x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple
max_channels: 512 # max_channels2.5 注册模块
关键步骤四:在task.py的parse_model函数中注册

elif m in (PatchMerging,PatchEmbed,SwinStage):c1, c2 = ch[f], args[0]if c2 != nc:c2 = make_divisible(min(c2, max_channels) * width, 8)args = [c1, c2, *args[1:]]2.6 执行程序
在train.py中,将model的参数路径设置为yolov8_Swin-Transformer.yaml的路径
建议大家写绝对路径,确保一定能找到
from ultralytics import YOLO
import warnings
warnings.filterwarnings('ignore')
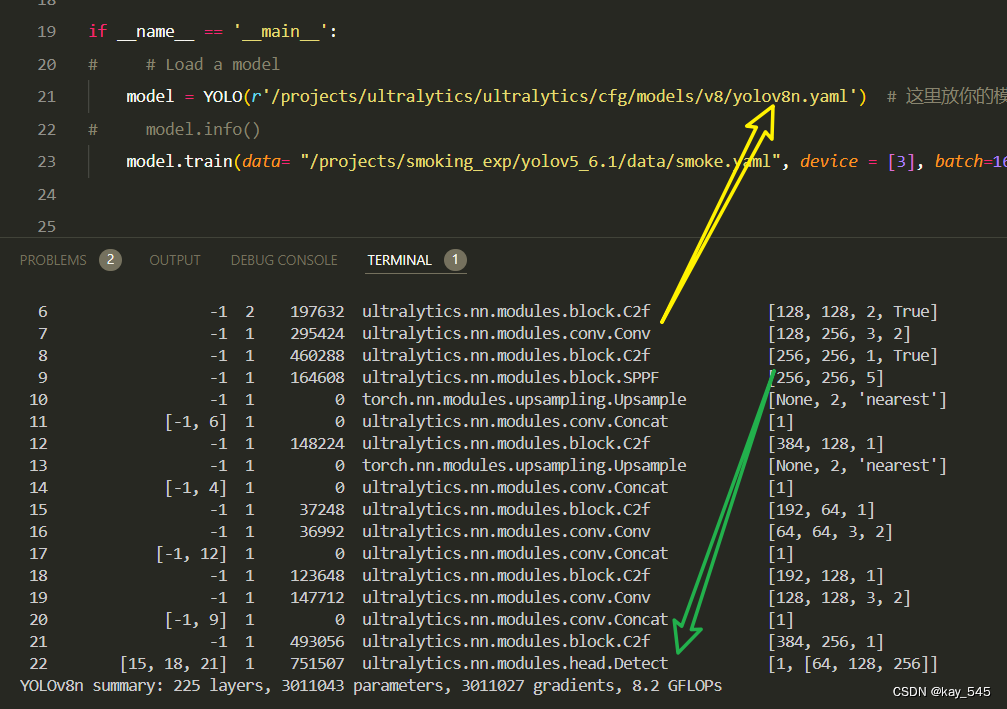
from pathlib import Pathif __name__ == '__main__':# 加载模型model = YOLO("ultralytics/cfg/v8/yolov8.yaml") # 你要选择的模型yaml文件地址# Use the modelresults = model.train(data=r"你的数据集的yaml文件地址",epochs=100, batch=16, imgsz=640, workers=4, name=Path(model.cfg).stem) # 训练模型🚀运行程序,如果出现下面的内容则说明添加成功🚀
from n params module arguments0 -1 1 1176 ultralytics.nn.modules.block.PatchEmbed [3, 24, 4]1 -1 1 15462 ultralytics.nn.modules.block.SwinStage [24, 24, 2, 3, 7]2 -1 1 4800 ultralytics.nn.modules.block.PatchMerging [24, 48]3 -1 1 58572 ultralytics.nn.modules.block.SwinStage [48, 48, 2, 6, 7]4 -1 1 18816 ultralytics.nn.modules.block.PatchMerging [48, 96]5 -1 1 683208 ultralytics.nn.modules.block.SwinStage [96, 96, 6, 12, 7]6 -1 1 74496 ultralytics.nn.modules.block.PatchMerging [96, 192]7 -1 1 897840 ultralytics.nn.modules.block.SwinStage [192, 192, 2, 24, 7]8 -1 1 92736 ultralytics.nn.modules.block.SPPF [192, 192, 5]9 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']10 [-1, 5] 1 0 ultralytics.nn.modules.conv.Concat [1]11 -1 1 135936 ultralytics.nn.modules.block.C2f [288, 128, 1]12 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']13 [-1, 3] 1 0 ultralytics.nn.modules.conv.Concat [1]14 -1 1 36224 ultralytics.nn.modules.block.C2f [176, 64, 1]15 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]16 [-1, 11] 1 0 ultralytics.nn.modules.conv.Concat [1]17 -1 1 123648 ultralytics.nn.modules.block.C2f [192, 128, 1]18 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]19 [-1, 8] 1 0 ultralytics.nn.modules.conv.Concat [1]20 -1 1 476672 ultralytics.nn.modules.block.C2f [320, 256, 1]21 [14, 17, 20] 1 897664 ultralytics.nn.modules.head.Detect [80, [64, 128, 256]]
YOLOv8_swin_trf summary: 348 layers, 3701954 parameters, 3701938 gradients, 31.3 GFLOPs3. 完整代码分享
https://pan.baidu.com/s/1YyxKn0ue9y6rYfpqykpUsg?pwd=8x9s提取码: 8x9s
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLOv8nGFLOPs
改进后的GFLOPs

5. 进阶
可以与其他的注意力机制或者损失函数等结合,进一步提升检测效果
6. 总结
Swin Transformer 是一种基于分区注意力机制和层次化结构的先进深度学习模型,通过在局部区域内进行自注意力计算以及使用窗口式注意力机制,实现了在图像分类和目标检测等任务上优异的性能表现。其Transformer缩放技术提高了模型的可扩展性和效率,使其能够处理大规模图像数据,并在训练和推理过程中保持高效率。综合而言,Swin Transformer以其创新性的设计和卓越的性能,成为处理图像数据的一种领先模型。








![[大语言模型] LINFUSION:1个GPU,1分钟,16K图像](https://i-blog.csdnimg.cn/direct/89f40abe651740ccbf16eec14116d5dd.png)